Технические науки/2. Механика
Аспирант
Пожидаев Ю.А., студентка Блондинская Е.Б.
Магнитогорский
государственный технический университет, Россия
Исследование электромеханических демпфирующих устройств
Требования к современному технологическому оборудованию становятся более
жёсткими. Первоочередное предписание к любой машине – это безопасность для
окружающей среды и человека. Одно из формализованных требований это низкий
уровень вибрации и акустических шумов.
Гашение
колебаний основывается на превращении кинетической энергии в другие виды
энергий (тепловую, электрическую и др.). Превращение кинетической энергии
механических колебаний в электроэнергию будем называть рекуперацией энергии
колебаний.
Рекуперация энергии
механических колебаний объекта, возможна с применением в системе демпферов
электромеханических модулей, под которыми понимается кинематическая связь между
подвижной частью динамической системы, участвующей в колебательном процессе, и
электрической машины (электрогенератором), образующих демпфирующую систему
(устройство).
Определение уровня
колебательного процесса, выявление частотного состава колебаний и анализ
взаимосвязи колебательных процессов, упрощается с применением электромеханических
демпфирующих систем.
Для исследования эффективности
системы демпферов, рекуперирующих энергию колебаний, спланирован эксперимент и
сконструирована экспериментальная установка (рис. 1), позволяющая оценить
работу и выявить возможные варианты управления динамическим поведением системы.
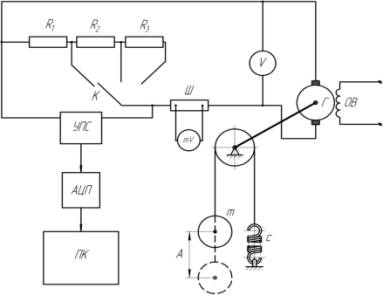
Рис. 1. Электромеханическая схема экспериментальной
установки
Целью исследований являлась проверка экономической целесообразности и
оправданности данного конструктивного решения. Для достижения цели решены
следующие задачи: 1) выявлен процент рекуперируемой энергии по отношению к кинетической
энергии динамической системы с электромеханическим демпфирующим устройством; 2)
выявлены соотношения параметров настройки электромеханической демпфирующей
системы, учитывая критерий энергоэффективность.
Динамическую систему
сконструированной установки можно охарактеризовать такими параметрами как,
инертная масса (т), жёсткость упругих
элементов (с), конструктивные
решения, выраженные в количественной форме, устойчивость элементов конструкции
и др [4]. При возмущении динамической системы знакопеременной силой, система испытывает
колебания, которые имеют следующие параметры: перемещение инертной массы
(амплитуда А), скорость и ускорение
элементов динамической системы, коэффициент затухания колебаний и др. В
динамической системе экспериментальной установки электрогенератор (Г) является управляемым амортизатором,
изменение режимов которого определяется способами управления электрической
машиной [5]. К таким способам относятся: изменение напряжения обмотки
возбуждения, регулирование сопротивления в цепи якоря, изменение магнитного
потока возбуждения и регулированием мощности потребителя электроэнергии.
Ранжированы значимые из
перечисленных факторов: инертная масса m, амплитуда колебаний инертной массы A,
напряжение на обмотке возбуждения электрогенератора U, мощность потребителя, изменяемая сопротивлением R. Параметры
выбранных факторов сведены в таблицу 1.
Таблица 1.
Варьируемые факторы и их интервалы
|
ФАКТОР |
Ед. измерения |
Обозначение |
Основной уровень |
Интервалы варьирования |
|
Масса груза |
кг |
m |
7,5 |
±5 |
|
Амплитуда колебания
системы |
мм |
A |
200 |
±100 |
|
Напряжение возбуждения |
В |
U |
12 |
±2 |
|
Сопротивление потребителя |
Ом |
R |
0,62 |
±0,31 |
Для получения регрессионной
математической зависимости рекуперации энергии диссипации проведён
многофакторный эксперимент, основанный на планах Хартли [3].
Опыты
проходили следующим образом. Инертную массу m,
находящуюся в покое, отклоняли из положения равновесия на значение равное
амплитуде А и фиксировали положение,
причём направление отклонения совпадает с силой тяжести инертной массы, что
вызывает растяжение пружины. Далее подают напряжение на электрическую цепь
экспериментальной установки, включают регистрирующие приборы и запускают программное
обеспечение персонального компьютера (ПК). Затем снимают фиксирование инертной
массы и наблюдают поведение динамической системы. После стабилизации положения
колебательной системы (полной визуальной остановки смещения инертной массы)
останавливают запись данных в ПК и размыкают электрическую цепь
экспериментальной установки. Каждый опыт повторяли 3 раза, а результаты
усредняли.
По результатам эксперимента
получена регрессионная зависимость рекуперируемой энергии диссипации колебаний
динамической системы:
 .
.
Анализ экспериментальных
данных показал, что процент рекуперируемой энергии Е составляет 5 – 10% от энергии динамической системы, испытывающей
механические колебания.
С одной стороны динамическая
система это некоторая энергоёмкая субстанция, в которой присутствуют
«паразитные» диссипативные силы и реализуется процесс создания нового источника
энергии. При этом конструктивно минимизируем диссипацию энергии и создаём
условия для её рекуперации, что увеличивает КПД механического объекта.
С другой стороны, в
конструкции динамической системы, участвующей в колебательном процессе,
необходимо минимизировать параметры колебаний или оптимизировать режим
демпфирования.
Один из наиболее значимых
факторов – это амплитуда. С точки зрения рекуперации энергии амплитудные
колебания обеспечивают стабильность работы электрогенератора. А демпфирование
позиционируется на снижении амплитуды.
Присутствие инертной массы в
динамической системе позволяет сохранять кинетическую энергию, тем самым поддерживает
инерционность системы. Массивность подвижных конструктивных элементов
увеличивает энергетические показатели процесса рекуперации, однако
дополнительные собственные частоты колебательной системы могут вызвать
резонанс.
Эмпирические
исследования демпфирующей системы для рекуперации энергии колебаний
представляют собой новые знания о мехатронных (электромеханических) модулях,
работающих в режиме генерирования электроэнергии, в механических колебательных
системах. Полученные знания можно реализовать при созидании новых автоматизированных
узлов и агрегатов, направленных на совершенствование управлением поведения
динамических систем металлургических машин, работающих в различных условиях. Возможность
электромеханической демпфирующей системы рекуперировать механические колебаний
в электроэнергию является основным достоинством этих устройств. Полезная
энергия (электроэнергия) направляется к потребителю, при этом качество её
соответствует ГОСТ 13109 – 97 [7]. Потребителем может выступать технический,
технологический или хозяйственный объект.
Литература:
1.
Пожидаев Ю. А.,
Кадошников В. И., Савочкина Л. В. Проектирование демпфирующих систем для
рекуперации энергии // Вестник МГТУ им. Г. И. Носова, 2011. № 3. С. 80 – 83.
2.
Численные методы / И.И. Данилина и др. – М.: Высшая школа, 1976.–368 с.
3.
Адлер Ю. П., Маркова Е.
В., Грановский Ю. В. Планирование
эксперимента при потоке оптимальных условий. – М.: Наука. 1976. – 289 с.
4.
Пановко Я. Г., Губанова И.И. Устойчивость и колебания упругих
систем. – М.: Наука, 1979. – 384с.
5.
Нейман Л. Р., Демирчян
К. С., Коровкин Н. В. Теоретические основы электротехники, в 3-х томах, СПб.:
«Питер», 2009
6.
Яворский Б. М., Детлаф А. А. Справочник по физике для инженеров и студентов вузов. – М.: Наука,
1965. – 848с.
ГОСТ
13109-97 Электрическая энергия. [Электронный
ресурс]. – Режим доступа:
http://gostexpert.ru/gost/gost–13109–97