ФИЗИЧЕСКАЯ КУЛЬТУРА И
СПОРТ/1.Физическая культура и спорт: проблемы, исследования, предложения
к.ф.-м.н., проф. Ашанин В.С., д.б.н., проф. Друзь
В.А.,
Петренко Ю.И., Пугач Я.И.
Харьковская государственная академия физической культуры, Украина
Основные положения, определяющие
организацию выполнения сложнокоординированной двигательной деятельности
Обоснование механизмов обеспечения
наиболее эффективной техники выполнения соревновательных упражнений одна из
наиболее важных составляющих задач в построении тренировочного процесса.
Постановка проблемы состоит в
использовании метода математического моделирования при обосновании процесса
оптимизации построения тренировочного процесса.
Двигательная деятельность, как конечный
результат проявления реакции приспособления на действие образовательной среды,
определяется тремя составляющими компонентами. К ним относится структурная
организация телосложения, которая составляет биомеханические элементы механизма
обеспечения перемещения тела; вторая составляющая обеспечения двигательной
деятельности определена ее качественной организацией и связана с сенсорной
оценкой пространственно-силовых и временных взаимообусловленных отношений
биокинематических элементов тела; третья составляющая обеспечения двигательной
деятельности определяется работой ВНД ЦНС и обеспечивает характер построения
двигательных актов, их сложность по числу одновременно и последовательно
включенных двигательных компонентов биокинематических цепей, определяющих
функциональное проявления динамических стереотипов движения.
Таким образом, конечный результат (R), который проявляется в законченном акте
двигательного действия, выступает критерием подобия эквифинального произведения
трех определяющих характеристик – структурной организации двигательного
аппарата (С), его качественного обеспечения взаимодействующих элементов (К) и
функциональной организации (Ф) построения высшей нервной деятельности
центральной нервной системы. Это можно представить в виде степенного одночлена Р=СαКβФγ
, где α, β, γ есть степень проявления представленных
определяющих характеристик, каждая из которых может быть больше 0 и меньшей или
равной 1, т.е. 1 α> 0; 1 ³ β > 0;1 ³ γ > 0.
Таким образом максимальное значение Р наблюдается
в случае, когда α=β=γ. Факт того, что конечный результат выражается
степенным одночленом, а не суммой определяющих характеристик вытекает из
положения невозможности проявления какого-либо конечного результата при равенстве
0 любой из определяющих характеристик, что возможно при выражении его как их
суммы.
Согласно теории подобия и размерности [9],
при заданном критерии подобия получения конечного результата, вариативность
значений каждой из определяющих характеристик может изменяться только в
определенных границах. Это и порождает в трехмерном пространстве, где они выступают
ортами координатных осей, эвкипотенциальную поверхность равной встречаемости
произведения Р=СαКβФγ; что
графически можно представить как поверхность равного натяжения.

Рис. 1. Представление поверхности получения равного
значения конечного результата при вариации значений определяющих характеристик
Поверхность равной встречаемости
произведения трех величин в трехмерном ортогональном пространстве является
гиперболической плоскостью. Характерной особенностью построения этой
поверхности является тот факт, что любому закрепленному значению одной из
определяющих характеристик соответствует некоторый диапазон вариации двух
остальных характеристик.
Варианты трехмерного представления типа
телосложения на основании использования определенных соотношений антропометрических
характеристик приведенных в работе [1] позволяют дать упорядоченную систематизацию
биокинематических характеристик типов телосложения и соответствующим образом
определить присущее каждому типу телосложения проявление двигательных качеств.
Выбрав один тип телосложения, совпадающий полностью по структурной организации
можно иметь целый промежуток вариативности качественной организации
взаимодействия элементов биокинематических звеньев, тоесть разную чувствительную
сенсорику, обеспечивающую точность координации двигательной деятельности. При
этом, по условию одинаковой встречаемости конечного результата, состоящего из
произведения равного Р/Сα=КβФγ следует,
что высокая точность взаимодействия биокинематической организации движения (К![]() ) при условии Р/С
) при условии Р/С![]() =const должна сопровождаться более упрощенной структурой
функциональной организации построения динамического стереотипа выполняемых
действий.(Фγ).
=const должна сопровождаться более упрощенной структурой
функциональной организации построения динамического стереотипа выполняемых
действий.(Фγ).
Высокая точность соединения последовательных
движений порождает длинную цепь координированных действий, характерных для
выполнения стандартных соревновательных упражнений, что присуще для таких видов
как спортивная и художественная гимнастика, фигурное катание, прыжки в воду,
тяжелая атлетика, пулевая стрельба, стрельба из лука.
В случае если Р/Сγ=const и
при этом проявляется минимально возможное для этих условий значение Кβ,
то есть более низкая координация, в организации построения движения или большей
толерантностью в их организации, то Фγ будет характеризоваться
возможным одновременным протеканием двигательных стереотипов, имеющих
одинаковую вероятность их совершения, выбор которых определяет ситуативные
условия среды.
В первом случае можно говорить о высоко
координированном построении движения, а во втором случае, о наличии
достаточного количества вариантов выбора равнозначного построения действий,
дающих одинаковый конечный результат, что можно характеризовать как проявление
ловкости, находчивости либо сообразительности. Такая организация поведения
характерна для деятельности в непрерывно меняющихся условиях взаимодействия, к
которым можно отнести все игровые виды, единоборства, технические виды спорта и
все виды деятельности, в которых среда ее выполнения имеет определенное
непостоянство (неустойчивость). В работе сложных механических систем это
характеризуется как устойчивость их поведения.
Подобного рода рассуждения могут быть
отнесены к любой из определяющих характеристик. При фиксированном значении Кβ,
либо Фγ аналогичным образом можно утверждать наличие диапазона
их изменения, в пределах которого возникает, равновозможный конечный результат
их взаимодействия.
Соотношение структурной организации
движения, вооружение его необходимой сенсорной системой, обеспечивающей
точность взаимодействия элементов и самого объекта со средой пребывания, т.е.
ее управляемость и наблюдаемость системы управления, представляющую
нейрогуморальные взаимодействия, обеспечивающие жизнеспособность управляемого
объекта, которые формировались природой на протяжении всей ее эволюции. В
основе этого процесса лежала репродуктивность системы, что в технике
характеризуется как ремонтопригодность; вариативность получения конечного
результата, о которой говорилось выше, что соответствует принципу
статистической организации конечного результата взаимодействующих элементов; и
отбор наиболее жизнеспособного варианта организации взаимодействующих
образований. Именно взаимодействие объекта с его образовательной средой
определяло выживание наиболее жизнеспособного объекта по своим структурным, качественным
и функциональным характеристикам. Этот общий принцип в организации поведения проявляется
и в настоящее время.
Существенное отличие какой-либо профессиональной
деятельности выступает отбирающим фактором тех лиц, которые наиболее
приспособлены для ее осуществления. Спорт высоких достижений выступает именно
таким отборочным фактором среды.
Для подавляющего количества технических
видов спорта, в которых двигательная деятельность человека в существенной мере
лимитирована благодаря ее усилению техническим устройством, значимость
морфометрических характеристик типа телосложения существенно утрачивает свою
роль в получении конечного результата выполняемой деятельности. В этом случае
ведущими факторами выступают сенсорное обеспечение восприятия технического
дополнения двигательной деятельности человека и его взаимодействия со средой, а
также мыслительной деятельностью, обеспечивающей процесс управления «человеко-машинной»
системой (ЧМС).
В этом случае выполняется условие Р/Сγ=const
и определяющая роль достижения конечного результата ложится на равновозможные
варианты получения одинакового результата произведения КβФγ=
Р/С![]() при условии Р/C
при условии Р/C![]() =const. В зависимости от меры постоянства
проявления возможных штатных ситуаций в организации управления ЧМС играют
различную роль в условиях выполнения профессиональной деятельности определяющих
характеристик Кβ и Фγ. Высокая степень новизны
в условиях выполнения профессиональной деятельности делает более значимым
фактором мыслительной деятельности (Фγ), а в ней ведущую роль
определяет фактор креативности [2,7].
=const. В зависимости от меры постоянства
проявления возможных штатных ситуаций в организации управления ЧМС играют
различную роль в условиях выполнения профессиональной деятельности определяющих
характеристик Кβ и Фγ. Высокая степень новизны
в условиях выполнения профессиональной деятельности делает более значимым
фактором мыслительной деятельности (Фγ), а в ней ведущую роль
определяет фактор креативности [2,7].
Особенность организации двигательной
деятельности в получении наиболее эффективного конечного результата состоит в
том, что наиболее стабильной из определяющих его достижение характеристик
является морфометрическая организация типа телосложения. В то время как
сенсорное обеспечение регуляции взаимодействия биокинематических элементов и
мыслительные процессы, регулирующие управление деятельности, подвержены
существенному изменению от степени утомления и текущего эмоционального
состояния.
Ослабление различимости восприятия
увеличивает ошибку оценки взаимодействия биокинематических элементов и снижает
сложность осуществляемой организации двигательной деятельности. Закономерности
протекания этих процессов остаются недостаточно изучены в системе целостного
представления организации двигательной деятельности, но отдельные вопросы,
составляющие эту проблему получили достаточно глубокое развитие [8].
На данном этапе исследования проблемы
организации двигательной деятельности особое место занимает математическое
моделирование. Наличие современного компьютерного обеспечения открывает
возможности создания моделей, отражающих индивидуальные особенности и
возможности построения сложно координационной двигательной деятельности. Это
существенно облегчает процесс обучения, профессиональный отбор, прогнозирование
перспективности достижения высоких результатов. Особое значение использования
компьютерного моделирования имеет в тех случаях, когда необходимо исследовать
деятельность человека в условиях повышенного риска, при котором прямое участие
обследуемого индивида не допустимо [5].
Касаясь первой составляющей двигательной
деятельности связанной с морфометрическими характеристиками строения тела,
всегда возникает вопрос рациональности построения индивидуальной техники
выполнения сложно координированной двигательной деятельности. В процессе
обучения, динамический стереотип определяющий соответствующее действие,
формируется в результате многократного повторения совершенствуясь через
исправление возникающих ошибок. В этом случае возникает проблема определения
допустимой величины ошибки [11].
Основное представление о структуре
построения движения на первом этапе его освоения даст наблюдение за его выполнением
кем-либо и последующего копирования структуры осваиваемого движения обучающимся.
Знание индивидуальных особенностей кинематических характеристик строения тела
позволяет определить движение при установлении траектории перемещения общего
центра тяжести (ОЦТ) тела.
В процессе эволюции для обеспечения
оптимальных траекторий перемещения ОЦТ тела формировалась такая структура его
организации, которая минимизирована не только энергетические затраты, но и
расход материала в конструкции построения биокинематических звеньев. Вся
совокупность построения движений состоит из маятнико-образных движений отдельных
звеньев, которые при определенной их частоте и амплитуде перемещения позволяют
осуществить необходимую траекторию движения ОЦТ.
При исследовании характера индивидуальных
особенностей перемещения тела наиболее широко используется видеосъемка с
последующим изучением перемещения различных точек тела. Описанные методы определения
центра масс и самих масс биокинематических звеньев [4] дают возможность
устанавливать характер перемещения ОЦТ различных биокинематических пар и всего
тела в целом.
Учитывая, что речь идет об
амплитудно-частотных характеристиках колебательных движений, то для расчетных
процессов может быть использован математический аппарат фурь-анализа [6].
Особенностью поведения любой кинематической пары является тот факт, что ее
колебательные движения, участвующие в общей структуре построения конечного
движения, несут в себе отражение колебаний всех участвующих биокинематических
элементов, что при разложении колебательного процесса отдельной биокинематической
пары позволяет выделить составляющие частоты, накладываемые друг на друга при
формировании общего движения.
Однако в целом не ставится задача
определения оптимальных траекторий перемещения ОЦТ. Именно эти траектории в
процессе эволюции лежали в основе формирования структурной организации тела и
механизмов, обеспечивающих управление его движения. Единственной траекторией
перемещения ОЦТ тела в безопорном движении является парабола. В зависимости от
поставленной задачи, является этот прыжок в длину или высоту, определяется вид
параболы полета. Перенос ОЦТ конечностей в ходьбе и беге осуществляется по
циклоидальной траектории, при этом можно определить полный диапазон образующих
эти циклоиды, которые являются результатом вращения ОЦТ конечностей. Касательно
перемещения общего центра тяжести всего тела в ходьбе и беге следует отметить,
что его траектория перемещается по геликоиде, формирование которой состоит из
вращательного и поступательного движения. Именно эти кривые перемещения ОЦТ
биокинематических цепей являются определяющими взаимообусловленного включения в
движение всех биозвеньев тела. Этот процесс осуществляется автоматически через
активную деятельность центральной нервной системы.
Движение, какого либо отдельного звена при
совершении общего движения в рефлекторном порядке автоматически включает
компенсаторное движение относительно траектории движения ОЦТ, в том режиме
работы в каком произошло движение отдельного звена. Такая картина
восстановления равновесия наблюдается, если человек неожиданно споткнулся либо поскользнулся.
Построение движения осуществляется не на основе суммарного объединения движения
отдельных компонентов кинематических звеньев тела, а на вовлечение их в
движение по мере необходимости сохранения заданной траектории движения ОЦТ тела
и необходимости сохранения определенной позы [3]. Именно такой принцип
необходимо использовать при построении модельного отображения сложно
координационных действий для исследования условий, обеспечивающих оптимальную
технику движений с учетом индивидуальных особенностей телосложения.
Регуляция такого рода деятельности
осуществляется за счет специфической функции мозжечка. Согласно концепции
Ингвара, основанной на обширном клиническом и экспериментальном материале,
мозжечок является таким органом, при помощи которого преодолевается в моторике
влияние двух основных свойств массы – тяжести и инерции. Основываясь на положениях,
высказанных Ингваром, Ариенс Капере предлагает рассмотреть мозжечок как орган,
обеспечивающий специальную бессознательную чувствительность – чувство массы [10].
Выполняя функцию контроля инерции тела и
его массы, мозжечок обеспечивает построения движения тела с той точностью
организации, с какой проприоцептивная чувствительность обеспечивает
согласованность взаимодействующих компонентов биокинематических цепей. По мере
морфо-функционального созревания опорно-двигательного аппарата и развития
сенсорики, обеспечивающей долевую соизмеримость взаимодействующих элементов,
усложняется структура выполняемых движений. При утомлении, в результате
снижения сенсорной чувствительности (наблюдаемости), соответствующим образом
снижается точность координационных действий, что ограничивает возможную
сложность их согласованного построения.
В основе построения двигательного
динамического стереотипа лежит принцип наименьшего действия, который при
заданной различимости обеспечивает максимально возможную точность управления
биокинематическими элементами относительно траектории движения ОЦТ. В свою
очередь ОЦТ движется по строго установленным траекториям, которые в опорном положении
являются циклоидой, окружностью, прямой, геликоидой, а в безопорной фазе
движения ОЦТ может двигаться только по параболической траектории.
Координация движений и управление ими
полностью базируется на проприоцепторной чувствительности и осуществляется без
участия осознанной координации. Если включить в структуру движения
дополнительную массу, то ее учет без осознанности восприятия места нахождения
этого включения вызывает соответствующие компенсаторные поправки. Участие
зрительного анализатора, как и проприорецепторного, обеспечивает оценку
скорости передвижения и время приближения реакции опоры, но в отличие от
проприорецепторного анализа движения зрительный анализатор осуществляет
управление с учетом еще предстоящего взаимодействия тела с элементами
окружающей среды. Учет предстоящих препятствий вносит необходимую коррекцию
построения двигательного акта.
Наиболее наглядно это можно наблюдать при
выполнении прыжковых движений. Безопорный полет ОЦТ всегда протекает по
параболической траектории. Наибольшая дальность полета наблюдается при вылете
ОЦТ под углом 45°. Однако непосредственные наблюдения показывают, что в
заключительной фазе опоры результирующая направляющая вектора силы направлена
под углом меньше 45°. У каждого из прыгунов при достижении одинакового
конечного результата этот угол существенно отличается.
Причина такого явления объясняется как с
позиции математического расчета, так и прямого физического эксперимента. В
момент реакции опоры при выполнении прыжка ОЦТ всегда находится над уровнем
плоскости приземления. Высота ОЦТ и длина прыжка относятся к величинам одного
порядка, что существенно сказывается на направленности угла траектории полета
ОЦТ для достижения максимальной дальности полета. Данный результат зависит от
длительности полета и линейной скорости перемещения ОЦТ. В свою очередь
длительность полета определяется начальным положением ОЦТ над плоскостью
приземления и вертикальной составляющей, величина которой уменьшает линейную
скорость полета ОЦТ. Решение вариационной задачи, которая в общем виде может
быть представлена как  , где V0 – скорость вылета ОЦТ под углом α; g – ускорение свободного падения; α – угол вылета;
h0 – высота
вылета; требует определение угла α при котором первая производная (L′) равна нулю. При заданном значении начальной
высоты нахождением ОЦТ однозначно определяется угол вылета. При нахождении
общей зависимости характеристики h0 и
, где V0 – скорость вылета ОЦТ под углом α; g – ускорение свободного падения; α – угол вылета;
h0 – высота
вылета; требует определение угла α при котором первая производная (L′) равна нулю. При заданном значении начальной
высоты нахождением ОЦТ однозначно определяется угол вылета. При нахождении
общей зависимости характеристики h0 и ![]() α. Определяется зависимость от угла вылета от значения h0.
Графическое решение этой задачи представляется следующим образом (рис. 2).
α. Определяется зависимость от угла вылета от значения h0.
Графическое решение этой задачи представляется следующим образом (рис. 2).
Физический эксперимент дает более
наглядную картину и реализуется следующим образом.
При полном преобразовании направленности
кинетической энергии разбега с горизонтальной в вертикальную, высота полета
вверх будет равна ![]() . При перераспределении движения на вертикальную и
горизонтальную составляющие дальность горизонтального полета будет зависить от
соотношения вертикальной и горизонтальной скоростей, полученных при разложении V0 за период реакции опоры в последнем шаге
разбега.
. При перераспределении движения на вертикальную и
горизонтальную составляющие дальность горизонтального полета будет зависить от
соотношения вертикальной и горизонтальной скоростей, полученных при разложении V0 за период реакции опоры в последнем шаге
разбега.
Решение этой задачи показывает, что
максимальная дальность полета будет наблюдаться при равенстве горизонтальной и
вертикальной составляющих разложения ,V0 что соответствует углу вылета равному 45°, или ![]() . В этом случае высота подъема ОЦТ равна
. В этом случае высота подъема ОЦТ равна ![]() , а дальность полета будет
, а дальность полета будет  . Если полет ОЦТ осуществляется от точки опоры до точки
приземления, которые лежат на одной горизонтальной прямой, то при учете незначительной
скорости и дальности полета его траектория будет представлять равнобочную
параболу.
. Если полет ОЦТ осуществляется от точки опоры до точки
приземления, которые лежат на одной горизонтальной прямой, то при учете незначительной
скорости и дальности полета его траектория будет представлять равнобочную
параболу.
В реальных условиях выполнение прыжков в
высоту и в длину ОЦТ находится относительно плоскости опоры на высоте hОЦТ , в
этом случае угол вылета будет отличаться от 45° и в зависимости от hОЦТ .В
момент реакции опоры он будет равен ![]() из чего следует, что
из чего следует, что ![]() . Это позволяет обеспечить перераспределение между
вертикальной и горизонтальной скоростями в сторону горизонтальной скорости так
как отпадает необходимость подъема ОЦТ от точки опоры на высоту hОЦТ, что
дает дополнительное время полета (t0). Таким образом угол вылета
. Это позволяет обеспечить перераспределение между
вертикальной и горизонтальной скоростями в сторону горизонтальной скорости так
как отпадает необходимость подъема ОЦТ от точки опоры на высоту hОЦТ, что
дает дополнительное время полета (t0). Таким образом угол вылета ![]() , а горизонтальная скорость в этом случае будет равна
, а горизонтальная скорость в этом случае будет равна ![]() или
или  .
.
Изменение угла вылета в зависимости от
поставленной задачи преодоления препятствия, возможно получить не только
расчетным путем, но и в прямом физическом моральном опыте.
Для этой цели используется механизм,
обеспечивающий постоянную скорость начального движения некоторой массы тела,
отражающей условный ОЦТ и устройств позволяющих перемещать условный ОЦТ
относительно воображаемой реакции опоры системы, определяющей место нахождения
этого ОЦТ. Реализация такой физической модели возможна в двух вариантах.
Первый из них может быть представлен
следующим образом: пружинный механизм выбрасывает шарик постоянной массы. Данный
механизм может быть поднят над уровнем плоскости опоры, а также наклонен
относительно ее в диапазоне от 0° до 90° (рис. 1).
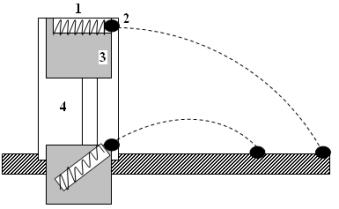
Рис. 1. Устройство для
определения оптимального угла вылета для преодоления препятствия с пружинным
механизмом: 1. - пружинный механизм; 2 - шарик, имитирующий ОЦТ некоторой
системы; 3 - плоскость поворота угла вылета шарика; 4 - плоскость перемещения
высоты вылета шарика относительно плоскости приземления
Второй вариант физической модели
отличается от первого тем, что пружинный механизм заменен постоянной высотой
сбрасывания шарика относительно его соударения с плоскостью, определяющей угол
полета шарика (рис. 2).
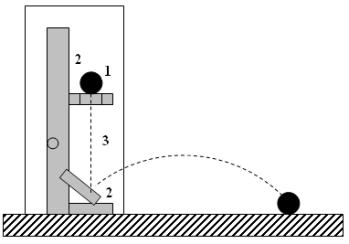
Рис. 2. Устройство для определения оптимального угла
вылета для преодоления препятствия с постоянной высотой сбрасывания: 1. -
шарик, имитирующий ОЦТ некоторой системы; 2 - плоскость поворота угла вылета
шарика; 3 - плоскость перемещения высоты вылета шарика относительно плоскости
приземления
Эквифинальный результат
выполнения любого сложнокоординированного двигательного действия определяется
различной мерой долевого участия в его построении определяющих компонентов –
структурной организации его построения, качественного обеспечения
взаимодействующих элементов и функционального состояния. Для модельного
представления этой зависимости может быть использован степенной одночлен,
отражающий связь трех отмеченных характеристик, формирующих получение конечного
результата.
При безопорном перемещении
тела прыгуна его ОЦТ описывает параболическую траекторию, которая имеет угол
вылета меньший 45°. Такой факт объясняется тем, что при отталкивании ОЦТ
находится над поверхностью опоры на определенной высоте, что позволяет
увеличить горизонтальную составляющую скорость за счет вертикальной с целью
обеспечения максимальной дальности полета. Если соединить начальное положение
нахождения ОЦТ с плоскостью опоры, то касательная направления вылета будет относительно
опоры составлять 45°, что не нарушает законов физики.
Дальнейшее развитие
исследований в данном направлении будет связано с совершенствованием методов
обработки видеоматериалов с целью установления динамических усилий,
определяющих траектории перемещения тела спортсмена, как при опорных так и
безопорных фазах его движения без использования дополнительно какой-либо
измерительной аппаратуры.
Литература
1.
Ашанин В.С. Структурная,
функциональная и онтологическая роль креативности в мыслительной деятельности
человека // В.С. Ашанин, Е.В. Басенко, Я.И. Пугач, С.С. Пятисоцкая // Слобожанський
науково-спортивний вісник. – 2010. – № 2. С. 155-162.
2.
Басенко Е.В.
Креативность личности спортсмена и ее влияние на спортивный результат в
автомобильном спорте : дис. … к.ф.в.с. / Е.В. Басенко. – Х., 2010. – 209 с.
3.
Виленкин Н.Я. Функции в
природе и технике / Н.Я. Виленкин. - М. : Просвещение, 1985. - 191 с.
4.
Виноградов М.И.
Физиология трудовых процессов / М.И. Виноградов. – Л. : Ленунизд, – 1958. – 462
с.
5.
Горбань А.Н. Демон
Дарвина. Идея оптимальности и естественный отбор / А.Н. Горбань, Р.Г.
Хлебопрос. – М. :, Наука, 1988. – 207 с.
6.
Мышкис А.Д. Лекции по
высшей математике / А.Д. Мышкис. - М. : Наука, 1969. – С. 520-579.
7.
Пугач Я.И. Психология
творчества как развитие теории Э.Каппа «Проекция органов» / Я.И. Пугач // Слобожанський науково-спортивний
вісник. – 2012. – № 3. С. 152-160.
8.
Самсонкин В.Н.
Теоретические основы автоматизированного контроля человеческого фактора в
человеко-машинных системах на железнодорожном транспорте : дис. … д.т.н. / В.Н.
Самсонкин. – Х., 1997. - 427 с.
9.
Седов Л.И. Методы
подобия и размерности в механике / Л.И. Седов. – М. : Наука, - 1981. – С.
11-37.
10.
Сеп Е.К. История
развития нервной системы у позвоночных / Е.К. Сеп. – М. : Медгиз, 1959. – 428
с.
11.
Peterzen D. Techniques of Safety Management. NY. : McCrawltill Comp,
1988. - P. 22-28.