Технические науки/11. Робототехника
Д.т.н. Ивель
В.П., к.т.н. Герасимова Ю.В.
Северо-Казахстанский
государственный университет
им.
М.Козыбаева, Казахстан
Зонный принцип управления подводным роботом
Немаловажную роль при проектировании
систем управления подводными аппаратами (роботами) играет исследование качества
переходных процессов. Если рассматривать показатели качества с позиции
требований, предъявляемых к подводным роботам (ПР), то необходимо выделить
следующие особенности: время перехода робота с одной заданной глубины на
другую, должно быть ограничено в связи с тем, что в это время не планируется
проводить какие-нибудь гидродинамические исследования, и это время считается
потерянным; перерегулирование и колебательность также должны быть минимальными,
т.к. эти показатели пропорциональны расходу воздуха из системы противодавления [1].
Одним из способов повышения качества управления ПР является применение зонного принципа управления. Для демонстрации этого принципа в статье предлагается рассмотреть Simulink-модель системы управления глубиной погружения подводного робота (СУГ ПР) (рис. 1).
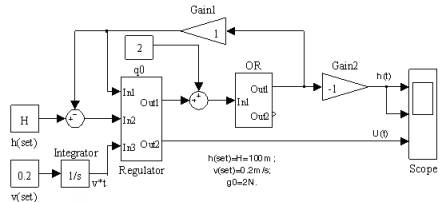
Рисунок 1. Simulink-модель
СУГ ПР
СУГ ПР
предполагает наличие двух режимов работы: режим приведения ПР к начальной или
новой заданной глубине погружения и режим зависания или стабилизации ПА на
заданной глубине. В зависимости от режима (или зоны нахождения ПР), система
формирует определенный алгоритм управления ПР [2].
В состав
модели (рис. 1) входят следующие блоки: H – блок задающий глубину стабилизации (h(set) =100 м);
v(set) – блок
задающий скорость погружения (v(set) = 0,2 м/с); q0 – блок
задающий начальную положительную плавучесть ПР (q0= 2 Н); Regulator – регулятор, формирующий управляющее воздействие; ОR – объект регулирования: ПР; Scope – виртуальный
осциллограф.
Регулятор Regulator разделен на два канала (рис. 2): канал Mode of immersing соответствует режиму приведения ПР на заданную
глубину, канал Mode of stabilization режиму стабилизации. Переключение каналов
осуществляется переключателем Switch.
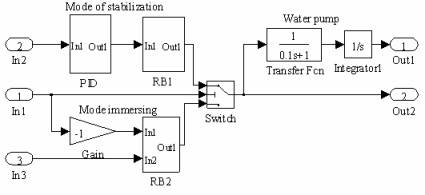
Рисунок 2. Внутренняя структура регулятора Regulator
Приведение ПР на заданную глубину обеспечивается
работой релейного блока RB2, а
стабилизация на заданной глубине блоками PID (ПИД-звено) и
релейным блоком RB1. Управляющее воздействие,
сформированное на выходе одного из каналов регулятора, поступает на входе
системы Water pump, представляющей
систему «электродвигатель постоянного тока (ЭПТ)+водяной насос», осуществляющей
откачку или закачку воды в балластную камеру, обеспечивая, тем самым, изменение
величины плавучести ПР.
В представленной системе применен
дифференциальный широтно-импульсный закон управления ЭПТ. Это позволяет
использовать достаточно простой критерий при оптимизации системы по расходу
энергии – скважность работы исполнительного механизма. Хотя в реальной системе
закон управления реализуется программно, для наглядности его можно представить
структурно (рис. 3).
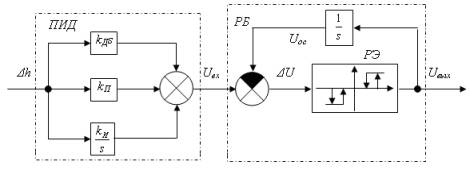
Рисунок 3. Структура основного закона управления
Условно закон управления делится на две
подпрограммы или подсистемы: ПИД-регулятор и блок, реализующий релейную функцию
с зоной нечувствительности и гистерезисом (РЭ), охваченный обратной
отрицательной связью. Релейный блок предназначен для подключения питания (Uвых) к
ЭПТ. Интегратор в цепи обратной связи РЭ придает системе качественно новые
свойства, создавая релейно-импульсный режим работы.
На рисунке 4, а представлены внутренняя
структура блока PID, коэффициенты, которого были
подобраны экспериментальным путем, а на рисунке 4,б – структура блока RB1.
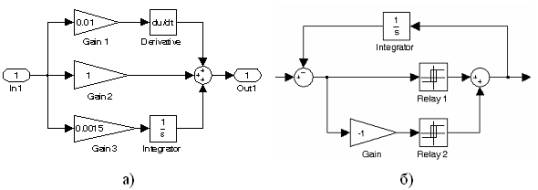
Рисунок 4. Внутренняя
структура ПИД-звена (а) и релейного блока RB1
Второй канал СУГ ПР содержит блок RB2, структура которого раскрыта на рисунке 5.
В начальный момент плавучесть ПА
положительна, и ПА находится на поверхности моря. После включения системы на вход
In1
(рис. 5) поступает 0. На вход In2 поступает линейно изменяющееся напряжение v(set)·t. Система
релейных элементов Relay 6 и Relay 2 создает на выходе управляющий импульс UУПР и
одновременно запускает интегратор в цепи обратной связи (рис. 5).
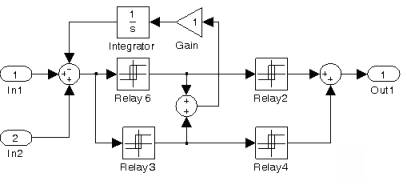
Рисунок 5. Внутренняя структура блока RB2
В момент, когда сигнал обратной связи
сравняется с сигналом v(set)·t, сигнал UУПР переключится в ноль. В таком режиме водяной насос будет
закачивать воду в балластную камеру до
тех пор, пока ПА не приобретет отрицательную плавучесть и не начнет погружение.
Когда скорость аппарата превысит заданную, сигнал на входе In1 превысит
сигнал на входе In2. После чего, система релейных элементов Relay 3
и Relay 4 включит реверс электродвигателя, и водяной насос
начнет откачивать воду из балластной камеры, уменьшая, тем самым, плавучесть
аппарата. Таким образом, аппарат погружается со скоростью близкой к заданной
(100 м). На рисунке 6, а отображен процесс приведения ПР к заданной глубине,
рисунке 6, б – изменение скорости, на рисунке 6, в – работа ЭПТ.
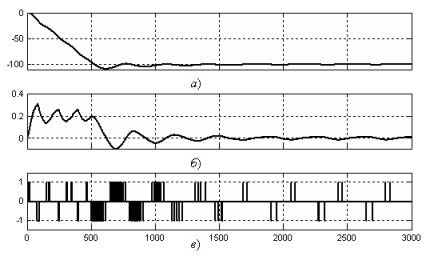
Рисунок 6. Процесс приведения ПР к заданной глубине
(а),
скорость погружения ПА (б) и рабочие импульсы UУПР (в)
Литература:
1.
Ястребов В.С., Соболев Г.П.,
Смирнов А.В., Онищенко Э.Л., Сычев В.А., Туманов И.В. Системы и элементы глубоководной
техники подводных исследований. – Л.: Судостроение, 1981. – 304 с.
2.Ивель В.П., Герасимова Ю.В. Моделирование системы
стабилизации глубины погружения подводного аппарата // Матер. республик.
науч.-практ. конфер. Петропавловск,
2006. – т. №1. – С. 72-76.