Ершова
Н.М.
Приднепровская государственная академия
строительства и архитектуры
АНАЛИТИЧЕСКОЕ
КОНСТРУИРОВАНИЕ УСТРОЙСТВ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМИ ПРОЦЕССАМИ СИСТЕМ РАЗЛИЧНОГО
НАЗНАЧЕНИЯ
Теория
систем М. Месаровича [1] предлагает научный путь изучения объекта - от наблюдаемых
факторов к прояснению внутреннего устройства (внутренней динамики) производственно-экономической
системы. Эта теория, кроме того, обобщает методы теории автоматического
управления с целью конструирования регуляторов общей природы.
Начальный
этап проектирования, на котором исследование системы осуществляется
математическими методами на математической модели оптимизации, называется
аналитическим проектированием. Основной целью аналитического проектирования
является определение некоторого множества приемлемых вариантов и параметров
системы, удовлетворяющих техническим требованиям. Системы с постоянными параметрами называют пассивными и соответствующее
управление – пассивным управлением. Постоянные параметры не всегда обеспечивают
требуемое качество функционирования объекта при изменяющихся условиях внешней
среды. В этом случае для обеспечения приемлемого уровня функционирования
объекта следует применять активное управление параметрами. Управление –
формирование управляющих воздействий, обеспечивающих требуемый режим работы
динамической системы.
Методы и средства представления объекта управления в технической кибернетике
образуют комплекс задач при аналитическом конструировании регулятора. Регулятор
– это устройство, оценивающее в каждый момент текущее состояние объекта и на
основе этой оценки вырабатывающее входные воздействия, которые выводят объект в
заданную точку пространства состояний. При этом реализуется принцип обратной
связи – текущее управляющее воздействие является функцией текущего состояния
объекта.
Задача
синтеза систем при случайных воздействиях и помехах называется задачей аналитического
конструирования устройств активного управления. Метод стохастического
динамического программирования содержит в своем алгоритме алгоритмы двух других
методов: динамического программирования для непрерывных детерминированных динамических
систем и оптимальных фильтров Калмана-Бьюси. Следовательно, для разработки
устройств управления, которые могли бы полностью реализовать алгоритм
стохастического динамического программирования, решать задачу активного
управления динамическими процессами следует поэтапно:
¨
вначале спроектировать пассивную систему;
¨
затем, если необходимо, создать механизм активного
управления, реализующий закон управления или матрицу параметров оптимального
фильтра.
Аналитическое
конструирование устройств управления на основе метода стохастического
динамического программирования колебательными процессами транспортных экипажей
представлено в работах [2, 3], динамическими процессами экономических систем -
работе [4]. Аналитическое проектирование кинетических процессов строительных
материалов приведено в работе [5].
В этом методе математическая модель объекта
управления имеет вид:
 (1)
(1)
где ![]() – неизвестный вектор
состояния системы;
– неизвестный вектор
состояния системы; ![]() – вектор управления;
– вектор управления; ![]() – вектор входных
возмущений;
– вектор входных
возмущений; ![]() – вектор наблюдения;
– вектор наблюдения; ![]() – вектор ошибок измерений;
– вектор ошибок измерений;
![]() – вспомогательные
матрицы соответствующих размеров.
– вспомогательные
матрицы соответствующих размеров.
Входное
возмущение и ошибки измерений выходных координат системы считаются гауссовскими
случайными процессами типа белого шума с нулевым математическим ожиданием. Следовательно,
их корреляционные функции принимаются в виде ![]() где d(t) -
дельта функцияДирака;
где d(t) -
дельта функцияДирака; ![]() – матрица,
элементами которой являются дисперсии входного возмущения;
– матрица,
элементами которой являются дисперсии входного возмущения; ![]() – матрица,
элементами которой являются дисперсии ошибок измерения компонент вектора
состояния. Начальное состояние системы представляет собой гауссовскую векторную
случайную величину, не зависящую от входного возмущения и ошибок измерительных
приборов, с математическим ожиданием
– матрица,
элементами которой являются дисперсии ошибок измерения компонент вектора
состояния. Начальное состояние системы представляет собой гауссовскую векторную
случайную величину, не зависящую от входного возмущения и ошибок измерительных
приборов, с математическим ожиданием ![]() и известной
корреляционной матрицей
и известной
корреляционной матрицей ![]() элементами
которой являются требуемые дисперсии выходных координат системы.
элементами
которой являются требуемые дисперсии выходных координат системы.
В качестве
критерия оптимальности принимается функционал
 (2)
(2)
где ![]() – матрица весовых
коэффициентов, учитывающих весомость компонент вектора состояния;
– матрица весовых
коэффициентов, учитывающих весомость компонент вектора состояния; ![]() – матрица весовых
коэффициентов вектора управления; символ
– матрица весовых
коэффициентов вектора управления; символ ![]() означает операцию
математического ожидания; символ
означает операцию
математического ожидания; символ ![]() в выражении интеграла
– транспонирование матриц. Физический смысл функционала – удержать средние
значения компонент вектора состояния около положения устойчивого равновесия без
слишком большой затраты (энергии, денежных средств и др.) на управление.
в выражении интеграла
– транспонирование матриц. Физический смысл функционала – удержать средние
значения компонент вектора состояния около положения устойчивого равновесия без
слишком большой затраты (энергии, денежных средств и др.) на управление.
Ставится задача:
определить закон управления по оценке вектора состояния системы, полученной на
основе измерения ее выходных координат на интервале времени ![]() , доставляющий минимум функционалу.
, доставляющий минимум функционалу.
В соответствии с
теоремой разделения оптимальное управление ![]() в системе,
представленной уравнениями (1), доставляющее минимум функционалу (2) , имеет
следующий вид:
в системе,
представленной уравнениями (1), доставляющее минимум функционалу (2) , имеет
следующий вид:
![]() (3)
(3)
где ![]() – обратная матрица;
– обратная матрица; ![]() - транспонированная матрица;
- транспонированная матрица; ![]() - оценка вектора состояния системы;
- оценка вектора состояния системы; ![]() – матрица–результат
решения матричного дифференциального уравнения Риккати:
– матрица–результат
решения матричного дифференциального уравнения Риккати:
![]() (4)
(4)
Оценка вектора состояния системы определяется из решения дифференциального
уравнения
![]() (5)
(5)
при ![]() В уравнении (5)
В уравнении (5) ![]() – корреляционная
матрица ошибки оценки, получаемая из решения дисперсионного уравнения типа
Риккати:
– корреляционная
матрица ошибки оценки, получаемая из решения дисперсионного уравнения типа
Риккати:
![]() (6)
(6)
Матрица параметров оптимального фильтра формируется из уравнения (5)
![]() (7)
(7)
Таким образом, стохастическое динамическое программирование позволяет
создать пассивную систему и ввести в нее активное управление по оценке вектора
состояния исследуемой системы.
Пример 1. Расчетная модель объекта
управления, соответствующая простейшей модели системы «кресло-оператор»
представлена на рис. 1. Определить матрицу параметров оптимального фильтра.
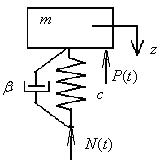
Рис.
1. Модель системы «кресло-оператор»
Полагая, что
управляющее воздействие ![]() приложено к
обрессоренной массе, запишем дифференциальное уравнение управляемого
колебательного процесса системы
приложено к
обрессоренной массе, запишем дифференциальное уравнение управляемого
колебательного процесса системы
![]()
или ![]() (8)
(8)
где ![]() - воздействие на подвеску
со стороны пола кабины;
- воздействие на подвеску
со стороны пола кабины; ![]() - масса кресла вместе
с оператором;
- масса кресла вместе
с оператором; ![]() - соответственно жесткость
подвески кресла и коэффициент сопротивления гасителей колебаний, установленных
в подвеске.
- соответственно жесткость
подвески кресла и коэффициент сопротивления гасителей колебаний, установленных
в подвеске.
Представим уравнение (8) в форме Коши, принимая ![]()
 (9)
(9)
Опишем состояние системы в соответствии с методом
стохастического динамического программирования
где
 В
качестве критерия оптимальности примем функционал качества:
В
качестве критерия оптимальности примем функционал качества:
![]() (10)
(10)
или в матричной форме ![]() , (11)
, (11)
где ![]() - весовые
коэффициенты функционала. Физический смысл функционала – расход энергии на
подавление вредных колебаний.
- весовые
коэффициенты функционала. Физический смысл функционала – расход энергии на
подавление вредных колебаний.
Матрицы
![]() функционала (11)
имеют вид:
функционала (11)
имеют вид:
 ;
; ![]() .
.
Закон
оптимального управления колебательным процессом системы
![]() (12)
(12)
Матрица ![]() определяется из
системы дифференциальных уравнений типа Риккати
определяется из
системы дифференциальных уравнений типа Риккати
![]() (13)
(13)
Для
стационарного режима движения элементы матрицы S с учетом ее положительной
определенности вычисляются по формулам
![]() (14)
(14)
В
работе [3] установлены зависимости между весовыми коэффициентами функционала
качества: ![]() ;
; ![]() и получены
аналитические зависимости для определения жесткости подвески и коэффициента
сопротивления гасителей колебаний, установленных в подвеске:
и получены
аналитические зависимости для определения жесткости подвески и коэффициента
сопротивления гасителей колебаний, установленных в подвеске:
![]() (15)
(15)
Для определения
оценки вектора состояния системы необходимо иметь корреляционную матрицу ![]() . В дисперсионное уравнение, из решения которого она
получается, входят матрицы
. В дисперсионное уравнение, из решения которого она
получается, входят матрицы ![]()
![]()
где ![]() – дисперсия внешнего
возмущающего ускорения;
– дисперсия внешнего
возмущающего ускорения; ![]() –
дисперсии ошибок измерений компонент вектора состояния.
–
дисперсии ошибок измерений компонент вектора состояния.
 (16)
(16)
 , где
, где ![]() - требуемые дисперсии
перемещений и скоростей центра масс кресла.
- требуемые дисперсии
перемещений и скоростей центра масс кресла.
Запишем
дифференциальное уравнение оптимального фильтра.
![]()
Следовательно,
матрица параметров оптимального фильтра имеет вид:
 (17)
(17)
Рассматриваемый
пример характерен для модернизации подвесок. В расчетах, связанных с
проектированием новых подвесок, необходимо принять матрицу ![]() из метода динамического
программирования для непрерывных детерминированных систем, т. е.
из метода динамического
программирования для непрерывных детерминированных систем, т. е. 
Так как элементы
матриц ![]() и оценка вектора
состояния системы будут меняться в зависимости от скорости и характера
колебаний пола кабины, то соответственно будут изменяться зависящие от них
закон управления, матрица параметров оптимального фильтра и параметры
проектирования.
и оценка вектора
состояния системы будут меняться в зависимости от скорости и характера
колебаний пола кабины, то соответственно будут изменяться зависящие от них
закон управления, матрица параметров оптимального фильтра и параметры
проектирования.
В работе [2]
путем введения ограничения на симметричность конструкции удалось решить задачи
аналитического проектирования и конструирования для механических систем с ![]() степенями свободы.
степенями свободы.
Пример
2. Получить матрицу параметров оптимального фильтра для процесса
выпуска валового продукта предприятия.
Решим
задачу поэтапно. На первом этапе определим постоянные параметры проектирования
с помощью метода динамического программирования для непрерывных динамических
систем. При этом не учитывается внешнее воздействие, так как в синтезирующей
функции будет гасящая его составляющая [4].
Простейшая
модель производственной мощности фирмы имеет вид [6]
![]() (18)
(18)
где ![]() - мгновенная фондоемкость основных производственных фондов
(ОПФ);
- мгновенная фондоемкость основных производственных фондов
(ОПФ); ![]() - коэффициент выбытия
или старения ОПФ;
- коэффициент выбытия
или старения ОПФ; ![]() - производственная мощность
предприятия.
- производственная мощность
предприятия.
Выразим
производственную мощность предприятия через валовой продукт ![]() и учтем прирост ОПФ.
Тогда получим дифференциальное уравнение процесса выпуска валового продукта
и учтем прирост ОПФ.
Тогда получим дифференциальное уравнение процесса выпуска валового продукта
![]() (19)
(19)
где ![]() - коэффициент роста
ОПФ.
- коэффициент роста
ОПФ.
Ставится задача – установить расчетные формулы для коэффициентов выбытия и
роста ОПФ при постоянной фондоемкости.
Запишем
уравнение (19) в виде
![]() (20)
(20)
или ![]() (21)
(21)
где ![]() – неизвестная
синтезирующая функция.
– неизвестная
синтезирующая функция.
Введем
обозначения: ![]() , тогда имеем
, тогда имеем
 (22)
(22)
Запишем
систему (22) в матричной форме
![]() (23)
(23)
где  .
.
В
качестве критерия оптимальности примем квадратичный функционал качества:
![]() (24)
(24)
или в
матричной форме
![]() ,
(25)
,
(25)
где ![]() - весовые
коэффициенты функционала.
- весовые
коэффициенты функционала.
Матрицы
![]() функционала (25)
имеют вид:
функционала (25)
имеют вид:
 .
.
Физический смысл функционала – затраты денежных
средств на поддержание стабильного функционирования предприятия. Ставится
задача: найти физически осуществимую синтезирующую функцию уравнения (21),
которая минимизирует функционал качества.
Необходимым условием оптимальности является решение нелинейного алгебраического
уравнения Риккати
![]() (26)
(26)
Из
развернутого вида (26) получаем систему нелинейных уравнений для определения
элементов симметричной матрицы S.
 (27)
(27)
Элементы матрицы
S с учетом ее положительной определенности вычисляются по формулам
![]() (28)
(28)
Синтезирующая
функция определяется матричным выражением

После
подстановки элементов S12 и S22 синтезирующая функция имеет
вид
![]() (29)
(29)
Если подставить
синтезирующую функцию (29) в уравнение (21), то получим
![]() , (30)
, (30)
где ![]()
Запишем для (30)
характеристическое уравнение
![]() (31)
(31)
Модель-аналог
управляемой системы описывается дифференциальным уравнением (19), характеристическое
уравнение которого имеет вид
![]() (32)
(32)
где ![]()
Из сравнения ![]() в уравнениях (31) и
(32) получаем аналитические зависимости для определения – коэффициентов выбытия
и роста ОПФ:
в уравнениях (31) и
(32) получаем аналитические зависимости для определения – коэффициентов выбытия
и роста ОПФ:
![]() (33)
(33)
В
работе [4] установлены зависимости между весовыми коэффициентами функционала
качества: ![]() ;
; ![]() . Развитие предприятия устойчиво при следующих значениях
параметров:
. Развитие предприятия устойчиво при следующих значениях
параметров:
![]()
В этом случае значения весовых коэффициентов функционала качества изменяются
в диапазоне: ![]()
На рис. 2–3 представлены зависимости между параметрами проектирования и
весовыми коэффициентами функционала качества.
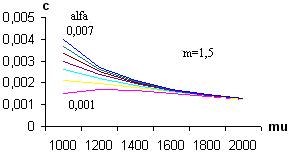
Рис.2. Зависимость коэффициента роста ОПФ от
весовых коэффициентов
функционала качества
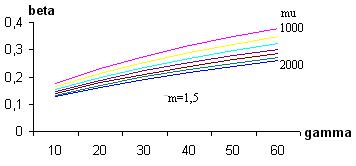
Рис.
3. Зависимость коэффициента выбытия ОПФ от
весовых
коэффициентов функционала качества
На рис. 4 изображены переходные характеристики процесса выпуска валового
продукта с проектными значениями параметров (кривая h2) и параметрами ![]() (кривая h1).
(кривая h1).
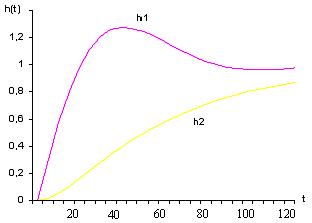
Рис.3. Переходные
характеристики
При оптимальных параметрах характер процесса апериодический, что желательно
для экономических процессов. Переходная характеристика h1 представляет колебательный
характер процесса, который может произойти при произвольном выборе параметров
проектирования.
Определим матрицу параметров оптимального фильтра для простейшей модели
производственной мощности предприятия. Запишем дифференциальное уравнение
управляемого процесса выпуска валового продукта
![]()
или ![]() (34)
(34)
где ![]() - объем внешних инвестиций
предприятия.
- объем внешних инвестиций
предприятия.
Представим уравнение (34) в форме Коши, принимая ![]()
 (35)
(35)
Система уравнений (35) совпадает по форме с системой уравнений (9). Следовательно,
в этих различных по физической природе системах возникают аналогичные
динамические процессы. Выполнив описание системы в соответствии с методом
стохастического динамического программирования и необходимые операции, получим
матрицу параметров оптимального фильтра (17).
В экономических системах возникает проблема представления субъекта
управления. В работе [7] показано, что подход М. Месаровича к описанию объекта
можно перенести на изучение субъекта управления. Субъект – это система, которая
ставит и решает задачи.
В соответствии с принципом Беллмана процесс определения решений,
протяженных во времени, разворачивается из будущего в обратной временной
последовательности. Следовательно, если для объекта воспользоваться свойством
обратимости системы влево [8], то получим субъект управления.
Планирующее устройство (планировщик) и регулятор основаны на общих
принципах и роли их аналогичны. Подключенный к субъекту планировщик
осуществляет планирование, т.е. выявляет и формулирует цепочку промежуточных
целей субъекта. В процессе управления субъект и объект взаимодействуют, но не
напрямую, а путем взаимодействия планировщика и регулятора в форме реализации
плана или программы.
Для построения математической модели субъекта возьмем модель объекта.
без учета внешнего возмущения, т.е. на вход объекта поступает вектор управления
![]() - множество
управленческих воздействий, выходом является вектор
- множество
управленческих воздействий, выходом является вектор ![]() - вектор наблюдения.
Тогда математическая модель объекта примет вид:
- вектор наблюдения.
Тогда математическая модель объекта примет вид:
 (36)
(36)
Объект управления представляется в виде черного ящика, вход и выход
которого можно непосредственно наблюдать и по ним оценивать текущее состояние ![]() для выработки
текущего входного воздействия
для выработки
текущего входного воздействия ![]() . Этим занимается устройство управления, которое по структуре
объекта (
. Этим занимается устройство управления, которое по структуре
объекта (![]() ) настраивается на него в процессе регулирования.
) настраивается на него в процессе регулирования.
Применим для
системы (36) свойство обратимости влево. Для этого составим сопряженную
систему, обозначив через ![]() - вектор целевого
состояния системы. Сопряженная система получается из исходной путем следующих
преобразований:
- вектор целевого
состояния системы. Сопряженная система получается из исходной путем следующих
преобразований:
¨ обращение времени;
¨ перестановка входной и
выходной матриц;
¨ транспонирование матриц ![]() .
.
 (37)
(37)
Свойство
обратимости системы влево позволяет по ее выходу определить вход, т.е.
построить модель субъекта управления (38).
 (38)
(38)
Назначение
планировщика в этом случае состоит в оценке вектора целевого состояния системы.
Математическая модель планировщика строится по математической модели устройства
управления
![]() (39)
(39)
или ![]() где
где ![]() - коэффициент усиления или рассогласования
фильтра;
- коэффициент усиления или рассогласования
фильтра; ![]() - матрица закона
управления;
- матрица закона
управления; ![]() - матрица параметров
оптимального планировщика.
- матрица параметров
оптимального планировщика.
Для процесса выпуска валового продукта матрица параметров оптимального
планировщика имеет вид:
 (40)
(40)
Сравнивая
матрицы (17) и (40) отмечаем, что матрица ![]() по форме является
транспонированной по отношению к матрице
по форме является
транспонированной по отношению к матрице ![]() системы (36) и
системы (36) и ![]() , но матрица
, но матрица ![]() отличается от матрицы
отличается от матрицы
![]() знаками
присоединенных составляющих к элементам матрицы
знаками
присоединенных составляющих к элементам матрицы ![]() .
.
Пример 3. Установить расчетные формулы
для определения параметров сопротивления и вязкости материала.
Оптимизацию
структуры и свойств материала из условий получения оптимальных параметров
кинетических процессов изменением рецептурно-технологических параметров можно рассматривать
как задачу оптимального управления. В материаловедении объектом управления
выступает кинетический процесс, управляющей системой –
рецептурно-технологические параметры, внешней средой – рынок.
При выборе функционала качества за основу принимают желаемый вид
кинетических процессов формирования основных физико-механических характеристик
материала. Формирование физико-механических характеристик в материале
происходит одновременно и длится некоторое время, т.е. этот процесс можно
рассматривать в виде параллельного переходного процесса.
В теории автоматического управления переходной процесс характеризуется
переходной функцией. Переходная функция системы – это реакция системы на
единичное ступенчатое воздействие при нулевых начальных условиях.
На рис. 5 представлена структурная схема моделирования кинетических
процессов формирования физико-механических характеристик материала.
Обозначения к структурной схеме: ![]() - передаточные функции
звеньев, имитирующих соответствующие физико-механические характеристики;
- передаточные функции
звеньев, имитирующих соответствующие физико-механические характеристики; ![]() - переходные функции
соответствующих кинетических процессов,
- переходные функции
соответствующих кинетических процессов, ![]() - входное воздействие
– единичная функция.
- входное воздействие
– единичная функция.
При параллельном соединении звеньев передаточная функция всей системы равна
сумме передаточных функций отдельных элементов. Но свойства системы – не просто
сумма отдельных свойств, поэтому следует исследовать отдельные цепи структурной
схемы, т.е. выполнить ее декомпозицию и моделировать каждый кинетический процесс
отдельно.
Рис. 5. Структурная схема
Докажем,
что обобщенная динамическая модель кинетических процессов в строительных
материалах может быть представлена обыкновенным дифференциальным уравнением
второго порядка
![]() (41)
(41)
где ![]() - параметр,
характеризующий сопротивление материала;
- параметр,
характеризующий сопротивление материала; ![]() - параметр, характеризующий
вязкость материала;
- параметр, характеризующий
вязкость материала; ![]() - максимальное
значение исследуемой физико-химической характеристики. Расчет обычно ведется на
1 кг материала, т.е.
- максимальное
значение исследуемой физико-химической характеристики. Расчет обычно ведется на
1 кг материала, т.е. ![]() =1.
=1.
Общее решение уравнения (41)
![]() ,
(42)
,
(42)
где ![]() - общее решение
однородного уравнения;
- общее решение
однородного уравнения; ![]() - частное решение неоднородного
уравнения.
- частное решение неоднородного
уравнения.
Однородное
дифференциальное уравнение имеет вид
![]() (43)
(43)
Уравнение
(43) линейное с постоянными коэффициентами. Его решение проще всего составить
по корням характеристического уравнения.
Характеристическое
уравнение:
![]()
![]() .
.
В зависимости от соотношений
![]() возможны различные ситуации:
возможны различные ситуации:
1. ![]() - случай критического
сопротивления в системе.
- случай критического
сопротивления в системе.
Тогда ![]() - имеем случай
кратных корней.
- имеем случай
кратных корней.
![]() . (44)
. (44)
2. ![]() - случай малого
сопротивления в системе
- случай малого
сопротивления в системе
![]() ,
,
![]() .
(45)
.
(45)
Частное
решение выбирается по виду правой части неоднородного уравнения (41). В данном
случае правая часть является постоянной. Тогда
![]() (46)
(46)
Подставим (46) в уравнение
(41) ![]() или
или ![]() и
и ![]()
Следовательно, ![]() (47)
(47)
Определим переходные функции
динамических звеньев. Колебательное звено получается при малом сопротивлении в
системе, т.е.
![]()
Определив произвольные
постоянные при нулевых начальных условиях, получим переходную функцию
колебательного звена.
 . (48)
. (48)
Апериодическое
звено второго порядка соответствует случаю критического сопротивления в
системе, т.е. переходная
функция
![]()
определяется по формуле (49)
![]() (49)
(49)
Переходная функция апериодического звено первого порядка получается
из решения уравнения динамики звена (50) при нулевых начальных условиях,
т.е. ![]() , (50)
, (50)
и определяется по формуле
(51)
 (51)
(51)
Кинетика
набора прочности эпоксидных композитов обычно представляется зависимостью (52)
[9].
![]() (52)
(52)
где
![]() - прочность композита
в момент времени
- прочность композита
в момент времени ![]()
![]() - максимальная прочность;
- максимальная прочность;
![]() - показатель,
характеризующий скорость твердения. В этой работе также доказано, что динамику
кинетических процессов можно описать уравнением (41).
- показатель,
характеризующий скорость твердения. В этой работе также доказано, что динамику
кинетических процессов можно описать уравнением (41).
Сравнивая зависимости (51) и (52),отмечаем аналогию
их формы. Следовательно, кинетический процесс набора прочности можно при
моделировании заменять апериодическим звеном первого порядка. При этом ![]() и
и ![]() Длительность переходного
процесса зависит от скорости твердения
Длительность переходного
процесса зависит от скорости твердения ![]() , т.е. изменением параметров модели кинетического процесса
можно регулировать время твердения.
, т.е. изменением параметров модели кинетического процесса
можно регулировать время твердения.
Выполним
аналитическое проектирование кинетического процесса набора прочности,
представленного однородным дифференциальным уравнением (43)
![]() (53)
(53)
где ![]()
Ставится
задача – установить расчетные формулы для параметров сопротивления и вязкости
материала.
Запишем
левую часть уравнения (53) в виде
![]() (54)
(54)
где ![]() – неизвестная
синтезирующая функция, представляющая собой ускорение процесса набора
прочности. Введем обозначения:
– неизвестная
синтезирующая функция, представляющая собой ускорение процесса набора
прочности. Введем обозначения:![]() Тогда
Тогда
 (55)
(55)
В
качестве критерия оптимальности примем квадратичный функционал качества:
![]() .
(56)
.
(56)
где ![]() - весовые
коэффициенты функционала. Физический
смысл функционала – минимум затрат энергии на управление переходным процессом.
- весовые
коэффициенты функционала. Физический
смысл функционала – минимум затрат энергии на управление переходным процессом.
Система
уравнений (55) по форме идентична системе уравнений (22). Следовательно,
выполнив необходимые математические операции, получим аналитические
зависимости для параметров
проектирования
![]() (57)
(57)
Для
определения диапазона изменения весовых коэффициентов необходимо установить
зависимости между весовыми коэффициентами и параметрами кинетического процесса.
Следовательно,
на основе метода стохастического динамического программирования можно решать
задачи аналитического проектирования и конструирования для систем любой
физической природы.
Литература:
1.
Месарович М., Такахара Я. Общая
теория систем: математические основы. - М.: Мир, 1978.
2. Ершова Н.М. Оптимальное проектирование системы
подвешивания железнодорожных экипажей. Дис.
докт. техн. наук. – Гомель, 1989. – 374 с.
3. Ершова Н.М. Методы и способы компьютерных
информационных технологий: Конспект лекций. – Днепропетровск: ПГАСА, 2005. –
169 с.
4. Ершова Н.М. Моделирование динамических процессов
экономических систем: Конспект лекций. – Днепропетровск: ПГАСА, 2007. – 112 с.
5. Ершова Н.М. Системный анализ в материаловедении:
Конспект лекций. Днепропетровск: ПГАСА, 2008. – 64 с.
6. Крушев В.Н. Теория управления. Технико-экономические
системы: Учебное пособие. – Казань: Изд-во Казан. гос. техн. ун-та, 2004. – 134
с.
7.
Батурин А.Н., Тихомиров А.А.
Моделирование экономических систем (целевой подход). М.: Изд-во Моск. Ун-та,
1987.
8. Фильтрация
и стохастическое управление в динамических системах/ Под ред. К.Т. Леондеса.
Пер. с англ. – М.: Мир, 1980. – 407 с.
9.
Гарькина И.А., Данилов А.М.,
Прошин А.П. Математические методы синтеза строительных материалов. – Пенза: ПГАСА,2001.
– 106 с.