Мельник В.М.
Національний технічний університет України «КПІ»
МОДУЛЬНИЙ ВАРІАНТ МОБІЛЬНОГО ШПИТАЛЮ
Конструкція належить до сфери
обладнання операційних кабінетів, а саме до операційних столів, і може бути
використаною в складі медичного устаткування мобільного шпиталю, обладнаному в
салоні транспортного засобу, зокрема, на вертольоті.
Відомий медичний стіл, який
містить основу на колесах, лежак, вузли кріплення хворого, приводи обертання
навколо поздовжньої осі, механізм підйому лежака, П-подібний кронштейн з віссю
та прямокутну раму з сергами. П-подібний кронштейн жорстко закріплений на валу
привода обертання лежака навколо поперечної осі, прямокутна рама шарнірно
з’єднана за допомогою серги з піввіссю П-подібного кронштейну і жорстко
скріплена за допомогою серги з валом привода обертання лежака навколо
поздовжньої осі. Лежак змонтовано на рамі з можливістю знімання, а геометричні
осі валів приводів обертання з’єднані з геометричною оссю, яка проходить через
центр мас прямокутної рами і лежака. При цьому, прямокутна рама виконана з
Т-подібними пазами і внутрішніми рухомими планками. Крім цього, прямокутна рама
медичного стола виконана з Г-подібною гребінкою [1].
Недоліком цього технічного
рішення постає складність конструкції і певні труднощі використання медичного
стола на транспортних засобах в складі мобільного шпиталю. Зокрема, на
вертольотах.
Відомий також операційний стіл,
що містить основу, самоорієнтуючиїся колеса, тумбу, панель, привод панелі,
фіксатор, педаль з фігурним пазом, кулісу з роликами, чотирма вертикальними
ричагами і тягами, зубчату муфту з диска і двох серег, з’єднаних шарнірно.
Кожне колесо має зубчатий диск, який взаємодіє з фіксатором через штовхач,
пружину, клиновидний ричаг з шайбою. Педалі з’єднані між собою за допомогою
роликів і ричага блокування з пазами на кінцях [2].
Недолік цього технічного рішення
полягає в занадто обмеженій функціональній спроможності операційного стола в
умовах транспортних засобів, коли хитавиця кузова (фюзеляжу) ставить під сумнів
саму можливість надання екстренної хірургічної допомоги постраждавшому. В першу чергу, це стосується
таких транспортних засобів як вертоліт, фюзеляж якого під час польоту підвладний
дії багатьох негативних чинників. Це хитавиця, лінійні і кутові прискорення,
вібрація, бовтанка тощо.
В основу пропонуємої конструкції
поставлена задача підвищення функціональної спроможності операційного столу
мобільного шпиталю на транспортному засобі шляхом забезпечення горизонтальної
нерухомості панелі операційного столу, разом з постраждавшим, на визначений
термін оперативної медичної допомоги безпосередньо в салоні транспортного
засобу під час його руху, за допомогою жорстко встановленої на панелі
операційного столу тривісної гіростабілізованої платформи, яка надалі виконує функції
панелі операційного столу при транспортуванні постраждавших.
Поставлена задача вирішується
тим, що пропонуєма конструкція усуває недоліки відомого рішення і пропонує нове
ефективне технічне рішення з новим технічним результатом.
Операційний стіл мобільного
шпиталю містить основу, у вилках якої встановлені колеса із здатністю їх
обертального руху відносно горизонтальної і вертикальної осей, тумбу, панель,
привод панелі, фіксатор колеса в горизонтальній площині, згідно заявленого
винаходу функцію панелі виконує жорстко встановлена на ній тривісна
гіростабілізована платформа, яка забезпечує горизонтальну нерухомість своєї
поверхні на визначений термін оперативної медичної допомоги безпосередньо в
салоні транспортного засобу під час його руху.
Наведені ознаки заявленого операційного
столу мобільного шпиталю належать до суттєвих, бо забезпечують досягнення
нового технічного результату, вигідно відрізняючи його від відомих аналогів.
Технічний результат від
використання пропонуєма конструкція операційного столу мобільного шпиталю забезпечується
жорсткою установкою на панелі операційного столу тривісної гіростабілізованої
платформи, яка забезпечує горизонтальну нерухомість своєї поверхні і виконує
функції панелі на визначений термін
оперативної медичної допомоги безпосередньо в салоні транспортного засобу під
час його руху
Тривісна гіростабілізована
платформа має три осі підвісу, які забезпечують три степені вільності її
обертального руху. Розташування осей може бути різним. Найбільш часто
зустрічаємим варіантом є такий, коли одна ось платформи перпендикулярна до її
площини (вертикальна), а інші дві розташовуються уздовж поздовжньої і
поперечної її осей в площині
платформи [3].
На платформі розміщуються три
двостепеневих гіроскопи, на осях прецесії кожного з яких знаходяться датчики
кута прецесії та датчики моментів. Осі чутливості всіх трьох гіроскопів взаємно
перпендикулярні. Один гіроскоп, ось власного обертання і ось прецесії якого
паралельні площині платформи, здійснює, разом із своєю системою розвантаження,
стабілізацію платформи відносно вертикальної осі, перпендикулярної до її
площини. Два інших гіроскопи здійснюють, разом із своїми системами
розвантаження, стабілізацію платформи відносно двох інших осей її підвісу. Осі
чутливості цих двох гіроскопів взаємно перпендикулярні і перпендикулярні до осі
платформи (вертикальної осі).
Тривісні платформа з силовою
гіроскопічною стабілізацією використовують як вільні платформи, які зберігають
задане вихідне положення, або як коректуємі у просторі [3].
Таким чином, постраждавший, який
потребує нагальної хірургічної допомоги, заходячися на платформі
гіростабілізатора, весь час займає горизонтальне положення, що забезпечує
неперервне, оперативне його відновлення під час руху вертольота, або іншого
транспортного засобу, аж до місця призначення.
Операційний стіл мобільного
шпиталю (рис. 1) використовується в складі медичного устаткування, обладнаного
в салоні транспортного засобу, наприклад, на вертольоті, і містить основу 1 з
вилками 2, самоорієнтуючиїся колеса 3 з
можливістю обертання навколо горизонтальної 4 і вертикальної 5 осей, тумбу 6,
панель 7, привод панелі 7 (не показаний), фіксатор 8 колеса в горизонтальній
площині, пристрої 9 для установки осей 10 зовнішньої рами 11 із стабілізуючим
уздовж поздовжньої осі платформи 14
двигуном 12 і редуктором 13, внутрішню раму 15 із стабілізуючим уздовж
поперечної осі платформи 14 двигуном 16 і редуктором 17, стабілізуючий двигун
18 і редуктор 19 обертального руху гіростабілізованої платформи 14 навколо
вертикальної осі, двостепеневі гіроскопи 20, 21 і 22, які розміщуються у нижній
частині платформи 14 (рис. 2). На схемі, для зручності сприйняття, гіроскопи
наведені зверху платформи.
Робота операційного столу
мобільного шпиталю здійснюється наступним чином. Після прибуття до району
бойових дій (або місця здійснення терористичного акту), штучно виставляється горизонтальне
положення платформи 14 безпосередньо в салоні фюзеляжу. Від бортових джерел
живлення подається змінний струм 36 В 400
Гц (або 40 В 1000 Гц)
та стале живлення ±27 В на гіромотори гіроскопів 20, 21, 22 та на їх
датчики кута, відповідно. На обмотки збудження стабілізуючих двигунів 12, 16 і
18 надається напруга від бортового джерела. На управляючі обмотки стабілізуючих
двигунів надходять, попередньо підсилені, сигнали з датчиків кута двостепеневих
гіроскопів, які пропорціональні кутовій швидкості повороту платформи від
початково встановленого горизонтального положення платформи (рис. 2). Сигнал
датчика кута прецесії першого гіроскопа (![]() 1), пропорціональний кутовій швидкості повороту
платформи 14 відносно поздовжньої її осі ХП, надходить на управляючу
обмотку стабілізуючого двигуна 12 і через редуктор 13 повертає платформу у
вихідне горизонтальне положення (рис. 3). Сигнал датчика кута прецесії другого
гіроскопа (
1), пропорціональний кутовій швидкості повороту
платформи 14 відносно поздовжньої її осі ХП, надходить на управляючу
обмотку стабілізуючого двигуна 12 і через редуктор 13 повертає платформу у
вихідне горизонтальне положення (рис. 3). Сигнал датчика кута прецесії другого
гіроскопа (![]() 2), пропорційний кутовій швидкості повороту
платформи 14 відносно поперечної осі УП, попередньо підсилений,
надходить на управляючу обмотку стабілізуючого двигуна 16, який через редуктор
17 повертає платформу відносно поперечної осі УП у вихідне,
горизонтальне, положення. Сигнал датчика кута прецесії третього гіроскопа (
2), пропорційний кутовій швидкості повороту
платформи 14 відносно поперечної осі УП, попередньо підсилений,
надходить на управляючу обмотку стабілізуючого двигуна 16, який через редуктор
17 повертає платформу відносно поперечної осі УП у вихідне,
горизонтальне, положення. Сигнал датчика кута прецесії третього гіроскопа (![]() 3), пропорційний кутій швидкості повороту
платформи 14 відносно вертикалі ZП, попередньо підсилений, надходить на управляючу обмотку
стабілізуючого двигуна 18, який через редуктор 19 повертає платформу у вихідне
положення.
3), пропорційний кутій швидкості повороту
платформи 14 відносно вертикалі ZП, попередньо підсилений, надходить на управляючу обмотку
стабілізуючого двигуна 18, який через редуктор 19 повертає платформу у вихідне
положення.
Коли вертоліт приземлюється в
районі бойових дій, на платформі 14 розміщують постраждавшого, попередньо
загальмувавши всі колеса 3 операційного столу відносно горизонтальної 4 і
вертикальної 5 осей обертання нажимом на відповідну педаль основи 1 (процес
разгальмування здійснюється нажимом на другу педаль основи 1, але в протилежному
порядку). Двигун 19 відключають для збереження вихідного взаємного положення
площини платформи відносно салона фюзеляжу. Пацієнта оперують під час польоту
вертольота до бази. Після приземлення на базі, колеса операційного столу
розгальмовують і хворого перевозять до реанімації.
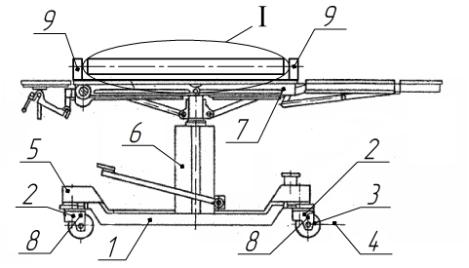
Рис. 1
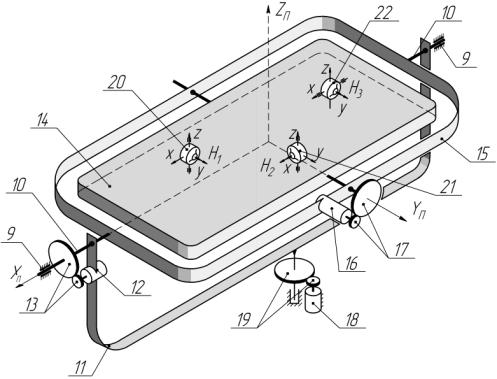
Рис. 2
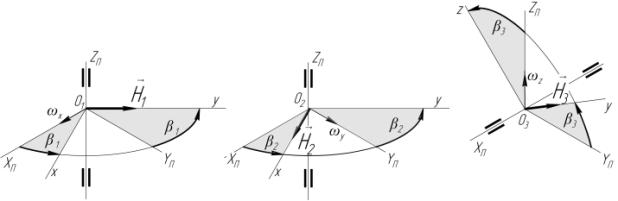
Рис. 3
Поранена людина до повернення на
базу, завдяки гіростабілізованій платформі, не змінює свого горизонтального
положення, що створює виключно комфортні і безпечні умови для необхідної
хірургічної допомоги людині. Причому, ані погодні умови, ані хитавиця чи
бовтанка, не впливають на вихідний стан платформи.
Таким чином, використання
операційного столу мобільного шпиталю дозволяє, за допомогою нових
властивостей, підвищити оперативність медичної допомоги постраждавшому у
вогневих сутичках і, тим самим, забезпечити ефективність заходів боротьби за життя
людини.
Література:
1.
А.с. 988287 СССР; МКл3
А61G13/00, А61 В 6/04.
Медицинский стол [Текст]/ В.Ф. Кечуев,
Е.Г. Волченков, А.С. Шидловский (СССР). - № 3301481/28-13; заявл. 09.06.81;
опубл. 15.01.83, Бюл. №2. – 1 с.: ил. 4.
2.
А.с. 1664315 А1 СССР; А61G13/00, А61 В 6/04.
Операционный стол [Текст]/ В.М. Собчук,
В.В. Морозов (СССР). - № 4719272/14; заявл. 14.07.89; опубл. 23.07.91, Бюл.
№27. – 1 с.: ил. 6.
3.
Данилин, В.П.
Гироскопические приборы [Текст]: уч. пособие / В.П. Данилин; Минвуз СССР. – М.:
Высш. шк., 1965. – 539 с.