Технические науки/4. Транспорт
Леонтьева Е.В.,
Матвеева М.Г., Ваганов Е.Е.
Омский государственный технический университет, Россия
Лидар и его структурная схема БОИ
лазерной системы измерения скорости
В отличие от обычных
полицейских «засад», скрывающихся за поворотом или за возвышенностью,
фоторадары обычно располагаются на прямом скоростном участке дороге или
открытой местности. Фоторадар может либо находиться в припаркованном
автомобиле, либо стационарно закреплен на специальном штативе, внешне напоминающим
«треногу».
Хотя фоторадары обычно не
бывают специально спрятаны от глаз, обнаружить их сложно из-за того, что они
излучают довольно слабый радиолокационный сигнал, который, к тому же, как
правило, направляется под большим углом к дороге. Поэтому слабым радар-детектором
обнаружить такой сигнал заранее очень сложно. Даже если такой детектор, уловит
сигнал, скорее всего, он может быть
интерпретирован как ложный из-за малой мощности.
В половине случаев термин
«фоторадар» используется не совсем корректно. Да, эта система каждый раз
фотографирует автомобиль, который превышает скорость, но его скорость далеко не
всегда измеряется доплеровским радаром. Сегодня все большее распространение
получают безрадарные системы. Их можно разделить на четыре типа:
1. Камеры фиксации нарушений
ПДД. Устанавливаются на перекрестках. Для фиксации скорости здесь часто
используются датчики, проложенные под дорогой. Эти датчики «чувствуют», когда
автомобиль въезжает на перекресток, посылают данные в компьютер, который
моментально подсчитывает скорость автомобиля. Если выявляется нарушение,
камера, установленная на перекрестке для фиксации проезда на красный свет,
делает снимок транспортного средства. Таким образом, с помощью одной
комплексной системы фиксируются и случаи проезда на красный свет, и нарушения
скорости. Радар-детектор такую камеру определить не может, так как здесь не
используется ни радар, ни лазер.
2. Камеры постоянного контроля
скоростного режима. Приводятся в действие пьезоэлементами, скрытыми под
дорожным покрытием. Под каждой полосой прокладывается отдельная пьезо-петля,
что позволяет определить, какое именно транспортное средство совершило
нарушение. Снимки производятся двумя камерами, расположенными вдоль дороги –
одна фотографирует автомобиль спереди, чтобы было видно лицо водителя, а вторая
– сзади, чтобы зафиксировать номерной знак. Такие камеры также не определяются
ни одним радар-детектором.
3. Комплексы измерения средней
скорости, а также камеры измеряющие скорость по видеоряду. Системы измерения
средней скорости предназначены для дорог ограниченного доступа и измеряют
время, затраченное конкретным автомобилем на то, чтобы преодолеть расстояние от
одного пункта контроля до другого, расположенного в нескольких сотнях метров
или даже километрах от первого. Все пункты фиксации объединены в одну систему.
Если автомобиль проехал участок дороги быстрее, чем полагается, на следующих
контрольных пунктах его ждут камеры. Эти системы пока используются лишь в
некоторых регионах России. Естественно, против них радар-детектор бессилен,
поскольку ни радары, ни лазеры не используются.
4. Лазерный фоторадар (лидар) или как его еще не редко называют,
оптический. Лидар излучает короткие импульсы лазера вне зрительного диапазона,
с фиксированным интервалом времени, в направлении автомобиля. Эти импульсы
отражаются от транспортного средства и принимаются лазерным измерителем. Лидар
фиксирует изменение дальности до объекта по времени задержки каждого
отраженного импульса. Цифровое устройство лидара вычисляет скорость автомобиля,
используя данные об изменении дальности за фиксированный промежуток времени.
Значение скорости выводится на дисплей измерителя в традиционном для каждого
региона формате (км/ч в России) [1].
Радары
лазерного типа способны сделать несколько сотен замеров дистанции менее чем за ![]() долю секунды, что
позволяет намного точнее определить скорость автомобиля, в основе работы
используется концентрированный световой луч [2].
долю секунды, что
позволяет намного точнее определить скорость автомобиля, в основе работы
используется концентрированный световой луч [2].
|
Лазерные радары |
|
|
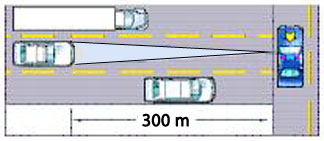
Рисунок 1
Дальность
действия лазерных радаров, как правило, не превышает 300-500 метров, а скорость
движения транспортных средств не превышает 250 км/ч (около 69 м/c). Исходя из этого, необходимо генерировать пачки
последовательностей импульсов с периодом не более 4,35 с.
Таким образом, частота следования пачек
импульсов составляет 0,23 Гц. Чтобы в пачку помещалось минимум два импульса,
частота следования импульсов должна быть выше частоты следования пачек
импульсов более чем в два раза.
Примем частоту следования импульсов равной
0,6 Гц.
Лазерные фоторадары, как правило, имеют
точность 2 км/ч. Вследствие эффекта Доплера частота отраженного луча при
изменении скорости транспортного средства на 2 км/ч (около 0,556 м/c) составит ![]() .
.
Угол ![]() взят равным 1
градусов исходя из высоты подвеса 5 м и расстояния до транспортного средства
300 м.
взят равным 1
градусов исходя из высоты подвеса 5 м и расстояния до транспортного средства
300 м.
Таким образом, минимальное изменение
частоты импульсов составит 9,23*10-10Гц, т.е. минимальное изменение
периода составит 3,706*10-9с. Следовательно, частота опроса
фотоприемника должна превышать 271,1 МГц.
Рассмотрим разработанную структурную схему
блока обработки информации (БОИ) лазерной
системы определения скорости движения транспортных средств с последующей
фотофиксацией, которая представлена на рисунке 2.
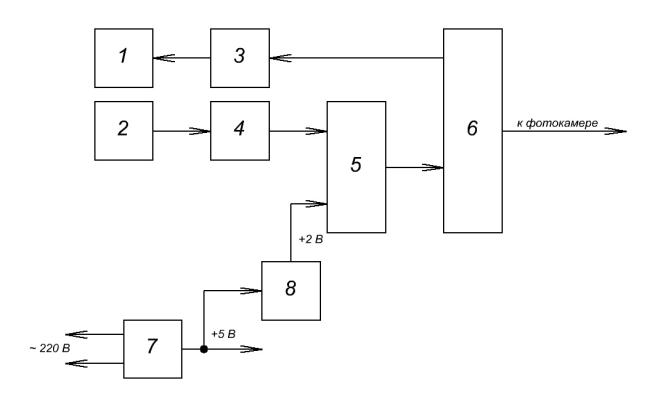
Рисунок 2
Основой устройства является микропроцессор
6, генерирующий последовательность импульсов.
Импульсы усиливаются в усилителе излучаемых
световых импульсов 3 и подаются на излучатель световых импульсов 1.
Отраженные от движущегося объекта импульсы
попадают на приемник световых импульсов 2, усиливаются в усилителе принимаемых
световых импульсов 4 и подаются на аналоговый компаратор 5.
Компаратор сравнивает полученный сигнал с
опорным напряжением. В случае если полученный сигнал выше опорного напряжения,
компаратор подает сигнал высокого уровня на процессор.
Если скорость транспортного средства превышает
установленное значение, микропроцессор формирует управляющий сигнал, отвечающий
за срабатывание фотокамеры.
Источник питания 7 обеспечивает
микропроцессор и усилители постоянным напряжением 5 В.
Источник опорного напряжения 8
обеспечивает компаратор постоянным напряжением 2 В.
На данный момент такая система
(лазерный фоторадар) только начинает развиваться. Например, в России пока всего
один стационарный пункт в Татарстане, где скорость измеряется с помощью лазера,
после чего производится снимок. Пока нельзя предсказать, насколько успешным
окажется этот опыт. Такую систему, теоретически, радар-детектор выявить может,
но многое будет зависеть от обстоятельств.
Технологии автоматического
измерения скорости постоянно совершенствуются, количество стационарных
комплексов видеофиксации нарушений растет из года в год. Вполне возможно, что с
дальнейшим развитием технологий возможностей обычных радар-детекторов станет
недостаточно для предупреждения об опасности [3].
Литература:
1. Сайт «Обзор современных полицейских
радаров» / http://www.stardreams.ru/press
2. Сайт «Радары» / http://www.geospars.lv/radars.php
3. Сайт «Антирадары» /
http://www.anti-radars.ru