К.ф.-м.н.
Докукова Н.A.,
к.ф.-м.н. Конон П.Н.
Белорусский государственный университет, Минск, Беларусь
Расчет динамических моментов в узлах многозвенного роботизированного
устройства
Роботы прочно вошли в
повседневную жизнь современной высокотехнологичной деятельности. Сегодня они
незаменимые помощники во многих отраслях промышленности [1].
Работа посвящена исследованию крутящих моментов
звеньев и узлов шагающего механизма человекоподобного робота, рисунок 1, методами
решения первой основной задачи динамики на основе известных кинематических законов
движения узловых точек, верифицированных с помощью компьютерных программ
визуализации, имитирующих походку человека. Представленные методики
динамических расчетов для заданных движений многозвенных роботизированных
механизмов могут найти применение для создания многообразных действий механическим
устройством посредством влияния асинхронными крутящими моментами [2 - 4] на сервоприводы в противоположных парных
суставах – шарнирах.
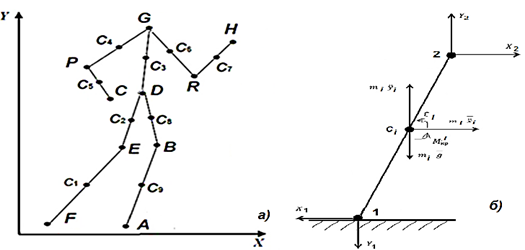
Рисунок 1 - Схема плоского
движения многозвенного роботизированного устройства на а и общая динамическая схема на б
Математическая модель
расчета динамических крутящих моментов звеньев и шарниров роботизированного устройства, схемы на
рисунке 2, в плоскости Oxy
представима
в виде зависимости от временной переменной t:
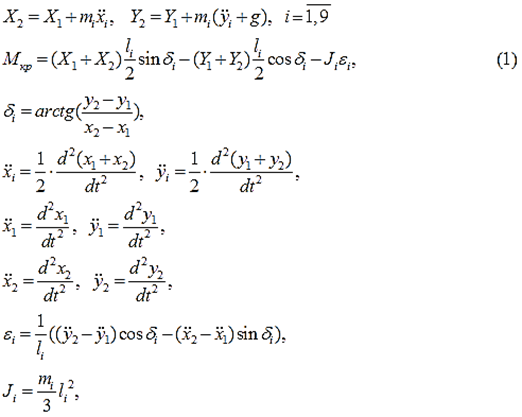
где mi
-
массы звеньев механизма; Ji
-
моменты инерции; li
-
длины звеньев; X1, X2, Y1
и Y2 -
проекции сил в шарнирах механизма; Mкр
-
искомый крутящий момент в шарнире, приводящий в движение звено; di
-
угол наклона звена к оси Ox; d2x1/dt2
, d2y1/dt2
-
проекции ускорения точки «1» в направлении осей Ox
и
Oy; d2xi/dt2, d2yi/dt2
-
проекции ускорения центра масс Ci
соответствующего
звена в направлении осей Ox и
Oy; ε
i
-
угловое ускорение звена.
Исследована кинематика
и динамика, вычислены крутящие моменты в узлах шагающего механизма прямоходящего
робота в среде компьютерных прикладных программ алгебраических символьных
вычислений. На представленных графиках крутящих моментов, приводящих в движение
весь механизм, наблюдаются попарно асинхронные динамические и кинематические
процессы в соответствующих суставах – шарнирах прямоходящего робота. Для
обеспечения работоспособности сложного устройства следует установить
приводы-движители в каждое сочленение звеньев механизма, которые управляются общей
электронной системой. Чувствительные датчики должны ограничивать движение
конечностей робота.
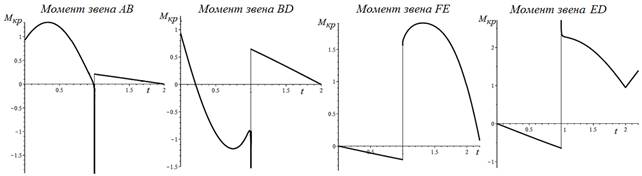
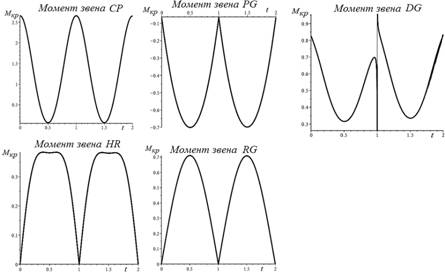
Рисунок 2 - Графики моментов всех звеньев
роботизированного устройства в плоскости Oxy с течением времени
Литература:
1. Накано
Э. Введение в робототехнику.– М.− 1988.
2. Dokukova N.A., Konon P.N. // Equivalence
of the Impedance Method and the Method of Amplitude‐Frequency Characteristics for Investigations of Vibrations
in Hydraulically Powered Supports/ JEPT.- 2003.- V. 76.- N 6.- P. 1401-1404.
3. Докукова Н.А., Кафтайкина Е.Н., Конон
Н.П. Синхронные колебания n - автономных осцилляторов на одной неупругой балке с жесткой заделкой// X МНПК «Перспективные вопросы мировой науки». Математика. Физика.-
София. Болгария.– 2014 г.- Т. 18.– C. 19-25.
4. Докукова
Н.А., Кафтайкина Е.Н., Кулаго А.Е. Динамико-математическая оптимизация машиностроительных
конструкций// XI МНПК «Образование и наука без
границ».– Przemysl. Polska.– 2015.– Т. 21.– C. 3-7.