Технические
науки/12.Автоматизированные системы управления на производстве
Дарбинян А.Г., Буниатян Л.М., Гаспарян О.Н.
Национальный политехнический университет Армении
О РАЗРАБОТКЕ
СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПРОЦЕССА ПЕРВИЧНОЙ ПЕРЕРАБОТКИ НЕФТИ C ПИ-РЕГУЛЯТОРОМ
Вопросам разработки систем
автоматического регулирования процесса первичной переработки нефти на установке
типа атмосферно-вакуумной трубчатки (АВТ) посвящено большое количество статьей [1,2].
В настоящей статье
рассматривается система регулирования температуры мазута вакуумного блока перегонки нефти, упрощенная структурная схема которой показана на рис. 1, где ![]() - входное (задающее)
воздействие, а
- входное (задающее)
воздействие, а ![]() - внешнее возмущающее
воздействие на выходе системы, обусловленное изменением расхода перегретого
пара в печь. Основной особенностью
данной системы является наличие транспортного (чистого) запаздывания
- внешнее возмущающее
воздействие на выходе системы, обусловленное изменением расхода перегретого
пара в печь. Основной особенностью
данной системы является наличие транспортного (чистого) запаздывания ![]() в объекте
регулирования, где последний представляет собой печь для подогрева
мазута (сырья) с целью получения вакуумного газойля широкого фракционного
состава (350–500 °С) и перегрева пара, который в дальнейшем поступает в
вакуумную колонну и в отпарные колонны установки АВТ [1].
в объекте
регулирования, где последний представляет собой печь для подогрева
мазута (сырья) с целью получения вакуумного газойля широкого фракционного
состава (350–500 °С) и перегрева пара, который в дальнейшем поступает в
вакуумную колонну и в отпарные колонны установки АВТ [1].
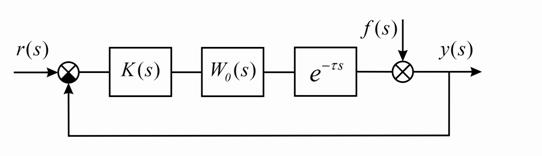
Рис. 1. Структурная схема системы регулирования температуры
мазута вакуумного блока установки АВТ
Передаточная функция объекта
регулирования ![]() на рис. 1 имеет вид [1]:
на рис. 1 имеет вид [1]:
 , (1)
, (1)
транспортное запаздывание ![]() равно
равно ![]() с, а
с, а ![]() есть передаточная
функция регулятора, выбираемого обычно в форме стандартного ПИД
(пропорционально-интегрально-дифференцирующего) регулятора [3,4]:
есть передаточная
функция регулятора, выбираемого обычно в форме стандартного ПИД
(пропорционально-интегрально-дифференцирующего) регулятора [3,4]:
![]() . (2)
. (2)
Отметим, что в случае объектов
регулирования с медленной динамикой и транспортным запаздыванием, к которым
относится рассматриваемая система регулирования температуры мазута, широко
применяют ПИ (пропорционально-интегрирующий) регулятор, т.е. регулятор без
дифференцирующего члена ![]() в (2):
в (2):
![]() .
(3)
.
(3)
В то же время, наличие в передаточной
функции ![]() (3) интегратора с
коэффициентом
(3) интегратора с
коэффициентом ![]() , который вводит дополнительный фазовый сдвиг
, который вводит дополнительный фазовый сдвиг ![]() , считается целесообразным, так как объект регулирования
, считается целесообразным, так как объект регулирования ![]() (1) является
статическим, а интегрирующий член в ПИ-регуляторе (3) приводит к замкнутой
системе регулирования с астатизмом первого порядка, имеющей нулевую статическую
ошибку при постоянных входных сигналах
(1) является
статическим, а интегрирующий член в ПИ-регуляторе (3) приводит к замкнутой
системе регулирования с астатизмом первого порядка, имеющей нулевую статическую
ошибку при постоянных входных сигналах ![]() [3].
[3].
Передаточная функция ![]() замкнутой системы на
рис. 1 от входа
замкнутой системы на
рис. 1 от входа ![]() до выхода
до выхода ![]() имеет вид:
имеет вид:
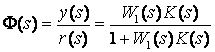 ,
(4)
,
(4)
где
![]() (5)
(5)
есть передаточная функция объекта регулирования с
учетом транспортного запаздывания ![]() .
.
Как известно [3,4],
наличие транспортного запаздывания в замкнутом контуре системы управления
приводит к уменьшению запасов устойчивости и даже к потере устойчивости
системы. Поэтому при выборе регулятора системы необходимо принять специальные
меры, сводящие, по возможности, к минимуму влияние транспортного запаздывания в
объекте регулирования на динамику системы.
Автоматизированная настройка
параметров ПИ-регулятора ![]() (3) при помощи
графического интерфейса пользователя (ГИП) PID Tuner в пакете Control System Toolbox системы MATLAB дает следующие результаты:
(3) при помощи
графического интерфейса пользователя (ГИП) PID Tuner в пакете Control System Toolbox системы MATLAB дает следующие результаты: ![]()
![]() . Передаточная функция ПИ-регулятора
. Передаточная функция ПИ-регулятора ![]() (3) при этом запишется
в виде:
(3) при этом запишется
в виде:
![]() . (6)
. (6)
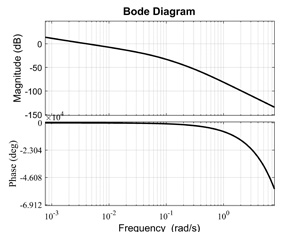
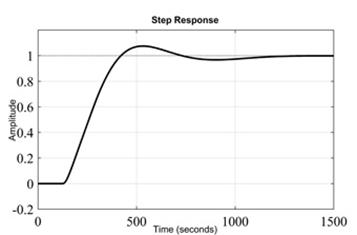
Соответствующие диаграммы Боде
и реакция замкнутой системы на единичный скачок показаны на рис. 2, откуда
видно, что запас устойчивости по амплитуде равен ![]() , по фазе
, по фазе ![]() , длительность переходного процесса составляет около 1060 с,
а перегулирование равно 7.6%.
, длительность переходного процесса составляет около 1060 с,
а перегулирование равно 7.6%.
а) б)
Рис. 2. Диаграммы Боде (а) и реакция замкнутой
системы
с ПИ-регулятором ![]() (6) на единичный
скачок (б)
(6) на единичный
скачок (б)
Вместе с тем, установившаяся
постоянная ошибка системы, определяемая линейным внешним возмущением
(изменением расхода перегретого пара в печь) на выходе системы ![]() , равна [3]:
, равна [3]:
![]() ,
(7)
,
(7)
где ![]() – добротность, т.е.
коэффициент передачи разомкнутой скорректированной системы. Как видно из (7),
единственной возможностью уменьшения ошибки
– добротность, т.е.
коэффициент передачи разомкнутой скорректированной системы. Как видно из (7),
единственной возможностью уменьшения ошибки ![]() является увеличение
добротности
является увеличение
добротности ![]() .
.
Однако любое увеличение
коэффициента передачи ![]() объекта регулирования
объекта регулирования ![]() (1) приводит, при использовании ГИП PID Tuner, к
соответствующему уменьшению коэффициента передачи ПИ-регулятора, т.е. общая
добротность системы
(1) приводит, при использовании ГИП PID Tuner, к
соответствующему уменьшению коэффициента передачи ПИ-регулятора, т.е. общая
добротность системы ![]() , а вместе с ней и ошибка
, а вместе с ней и ошибка ![]() (7), остаются
неизменными. Иными словами, автоматическая настройка параметров ПИ-регулятора
при помощи ГИП PID Tuner не
позволяет задавать требуемые значения добротности системы
(7), остаются
неизменными. Иными словами, автоматическая настройка параметров ПИ-регулятора
при помощи ГИП PID Tuner не
позволяет задавать требуемые значения добротности системы ![]() , т.е. воздействовать на ошибку системы
, т.е. воздействовать на ошибку системы ![]() (7), вызванную внешним
возмущением
(7), вызванную внешним
возмущением ![]() .
.
Для устранения указанного
недостатка можно предложить следующую процедуру проектирования системы
регулирования температуры мазута
вакуумного блока установки АВТ, состоящую из двух этапов. На первом этапе на
основе стандартной методики выбираются параметры ПИ-регулятора (например, при
помощи ГИП PID Tuner).
Полученный ПИ-регулятор при этом обеспечивает «наилучшие» значения запасов
устойчивости и временных характеристик системы, но ошибка замкнутой системы,
вызванная внешним возмущением ![]() , может не удовлетворять требуемым значениям. На втором этапе
в систему вводится последовательно с ПИ-регулятором дополнительная коррекция в
виде так называемого «диполя» [4],
представляющего собой два близко расположенных действительных полюса и нуля,
суммарное влияние которых на частотные характеристики разомкнутой системы в
области частоты среза незначительно. При этом, если полюс находится ближе к
мнимой оси, то это позволяет «поднять» низкочастотную область логарифмической
амплитудно-частотной характеристики разомкнутой системы, т.е. увеличить
добротность
, может не удовлетворять требуемым значениям. На втором этапе
в систему вводится последовательно с ПИ-регулятором дополнительная коррекция в
виде так называемого «диполя» [4],
представляющего собой два близко расположенных действительных полюса и нуля,
суммарное влияние которых на частотные характеристики разомкнутой системы в
области частоты среза незначительно. При этом, если полюс находится ближе к
мнимой оси, то это позволяет «поднять» низкочастотную область логарифмической
амплитудно-частотной характеристики разомкнутой системы, т.е. увеличить
добротность ![]() . Выбор конкретных значений дополнительного полюса и
нуля диполя осуществляется методов проб и ошибок и должен основываться на
требуемом увеличении величины
. Выбор конкретных значений дополнительного полюса и
нуля диполя осуществляется методов проб и ошибок и должен основываться на
требуемом увеличении величины ![]() .
.
Проиллюстрируем предложенную
методику на конкретном примере. Введем в систему последовательно с ![]() (6) корректирующее
устройство с передаточной функцией
(6) корректирующее
устройство с передаточной функцией
 , (8)
, (8)
имеющей полюс в точке ![]() и нуль в точке
и нуль в точке ![]() .
.
Диаграммы Боде и реакция
замкнутой системы на единичный скачок с суммарной коррекцией ![]() , где передаточные
функции
, где передаточные
функции ![]() и
и ![]() даются выражениями (6)
и (8), показаны на рис. 3. Из рис. 3 видно, что у скорректированной системы
запас устойчивости по амплитуде равен
даются выражениями (6)
и (8), показаны на рис. 3. Из рис. 3 видно, что у скорректированной системы
запас устойчивости по амплитуде равен ![]() , по фазе
, по фазе ![]() , длительность переходного процесса составляет около 1000 с,
а перегулирование равно 9.23%. По существу, запасы устойчивости и временные
характеристики систем с исходной коррекцией
, длительность переходного процесса составляет около 1000 с,
а перегулирование равно 9.23%. По существу, запасы устойчивости и временные
характеристики систем с исходной коррекцией ![]() (6) и суммарной коррекцией
(6) и суммарной коррекцией ![]() практически
совпадают.
практически
совпадают.
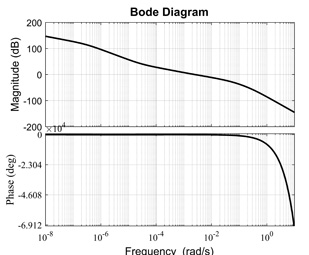
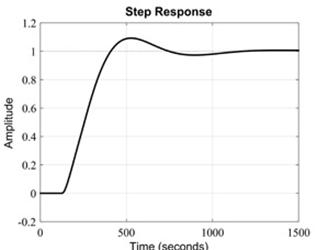
Рис. 3. Диаграммы Боде (а) и реакция замкнутой
системы с ПИ-регулятором
и дополнительной коррекцией ![]() (8) на единичный
скачок (б)
(8) на единичный
скачок (б)
С другой стороны, добротность
системы с дополнительной коррекцией ![]() (8) приблизительно в
100 раз (более точно, в 94.5 раз) больше добротности системы с исходным
ПИ-регулятором
(8) приблизительно в
100 раз (более точно, в 94.5 раз) больше добротности системы с исходным
ПИ-регулятором ![]() (6). Соответственно,
приблизительно в 100 раз меньше является и установившаяся ошибка
(6). Соответственно,
приблизительно в 100 раз меньше является и установившаяся ошибка ![]() (6), обусловленная
внешним возмущением на выходе системы
(6), обусловленная
внешним возмущением на выходе системы ![]() .
.
Таким образом, в работе
предложен инженерный подход к проектированию системы регулирования температуры мазута вакуумного блока перегонки
нефти, который позволяет обеспечить с использованием ПИ-регулятора как
требуемые запасы устойчивости и временные характеристики системы, так и
необходимые значения ошибки системы, вызванные внешними возмущающими
воздействиями, например, изменением
расхода перегретого пара в печь.
Литература:
1. Афиногентов А.А., Плешивцева Ю.Э., Сетин С.П., Тычинина Ю.А. Cтруктурно-параметрический
синтез многоконтурной системы автоматического регулирования процесса первичной
переработки нефти с объектом регулирования с транспортным запаздыванием// Вестник Самарского государственного
технического университета. Cерия Технические науки. -2014-№ 4 (44), стр. 160-168.
2. Ремизова
О.А, Рудакова И.В., Сыроквашин В.В., Фокин А.Л. Робастное управление
линейным объектом с запаздыванием с применением квадратичных методов синтеза
системы // Изв. вузов. Приборостроение. – 2011. – Т. 54. – № 12. – С. 22-29.
3. Бессекерский В.А., Попов Е.П. Теория систем
автоматического регулирования.-М.: Наука, 2003.
4. Dorf
R. C., Bishop R. H. Modern Control Systems. Addison-Wesley Publishing Co., Reading, 12th
ed.,MA, 2010.