УДК 621.446
ЛОКАЦИЯ
ИСТОЧНИКА СИГНАЛА В ПРОСТРАНСТВЕ
Королёв
С.А., студент.
(Донецкий
национальный технический университет, г. Донецк, Украина)
Вопрос нахождения координат источника сигнала в пространстве
чрезвычайно важен для ряда отраслей производства. Например, методы локации
источника сигнала используются в системах спутниковой связи, в системах
прогноза землетрясений. Также локация используется в дефектоскопии для
выявления местоположения источника вибросигнала, а также в системах
автоматизированного контроля параметров угольного пласта. В качестве сигнала
может быть использован радиосигнал, вибросигнал, сигнал акустической эмиссии.
Таким образом, целью данного исследования
является разработка объемного (трехмерного) алгоритма локации сигнала в
замкнутой системе. В рамках данной работы решаются следующие задачи:
-
выбор
алгоритма решения задачи локации;
-
разработка
математического аппарата.
Для решения
задачи локации существует два типа алгоритмов: амплитудный и фазовый.
Существенное их различие заключается в том, что в амплитудном методе измеряют
разницу падений амплитуд на разных приемниках, а в основе фазового лежит
измерение временной разницы приходов сигналов на регистрирующие устройства.
С развитием таких алгоритмов
анализа сигналов, как вейвлет-анализ,
стало возможным применение фазового метода даже в горных условиях, сигналы в
которых характеризуются высокой зашумленностью, выявление правильной временной
отсечки прихода полезного сигнала решается с минимальной погрешностью, что дает
большое преимущество фазовому методу.
Для решения задачи локации с помощью фазового метода
необходимо производить разнесенную в пространстве регистрацию сигналов
акустической эмиссии. Ключевым для этой задачи является определение разницы
времени прихода сигналов на разные датчики.
На рис. 1 представлена упрощенная схема
замкнутой системы, в которой источник S испускает сигнал, а с помощью
приемников A, B, C, D, E, F, G, и H этот сигнал снимается, и вычисляется
положение источника S.
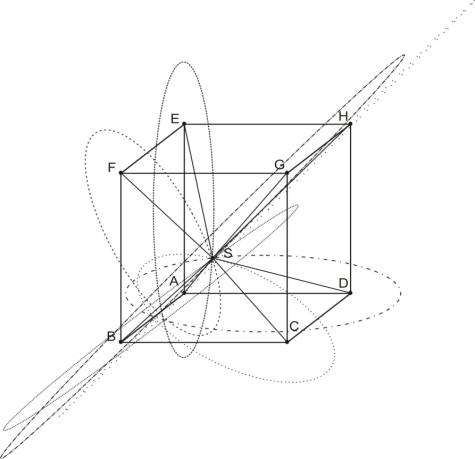
Рисунок 1 – Модель и решение задачи
локации.
Результаты
проведенных исследований предварительной математической модели анализа
показывают (рис. 2), что число приемников, большее пяти, практически не
приносит уменьшения значения погрешности вычисления координат источника
сигнала.
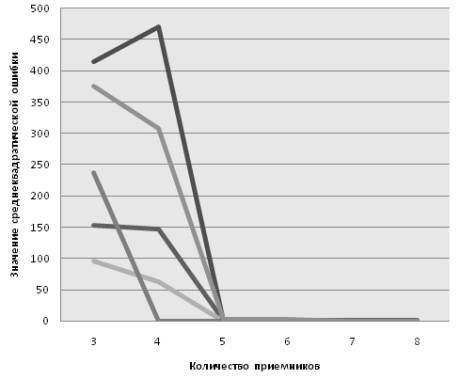
Рисунок 2 -
Результаты исследований влияния количества приемников на значение
среднеквадратической ошибки вычисления.
Следовательно,
при решении задачи локации необходимо и достаточно использовать сигналы с пяти
ближайших к источнику датчиков.
Сумма
расстояний между источником и двумя приемниками соответственно определяет
эллипс с фокусами, расположенными в точках нахождения приемников.
Искомые
координаты источника будут находиться на данном эллипсе. Для их корректного
определения необходимо использовать сигналы с пяти датчиков. Учитывая выражения
для расстояний между источником сигнала акустической эмиссии и датчиками,
получаем систему из четырех уравнений:
![]()
где
![]() – скорость
распространения сигнала в среде,
– скорость
распространения сигнала в среде, ![]() – искомые координаты
источника,
– искомые координаты
источника, ![]() ,
, ![]() ,
, ![]() и
и ![]() - координаты
ближайшего к источнику датчика и время, за которое сигнал проходит путь от
источника к датчику, а
- координаты
ближайшего к источнику датчика и время, за которое сигнал проходит путь от
источника к датчику, а ![]() ,
, ![]() ,
, ![]() и
и ![]() – соответственно
координаты одного из четырех остальных ближайших к источнику датчиков и разница
между временными отсечками поступлений сигнала на этот датчик и на ближайший к
источнику. Зная координаты датчиков и время прихода сигналов, можно численно
решить полученную систему уравнений и определить координаты источника.
– соответственно
координаты одного из четырех остальных ближайших к источнику датчиков и разница
между временными отсечками поступлений сигнала на этот датчик и на ближайший к
источнику. Зная координаты датчиков и время прихода сигналов, можно численно
решить полученную систему уравнений и определить координаты источника.
Недостатком
этой работы является то, что не учтена ситуация, когда одновременно появляются
два источника сигнала. Также не учтена вероятность появления сигнала за
пределами контура.
В
данной работе представлен алгоритм решения задачи локации в трехмерном контуре.
Описаны математические основы решения задачи и результаты исследования
эффективности алгоритма.