Применение систем динамического позиционирования. Устройство,
принципы работы.
Юдин Юрий Иванович, д.т.н., профессор, заведующий кафедры Судовождение
Грабаровский Алексей Борисович, аспирант
Иванов Виталий Витальевич, аспирант
Судоводительский факультет МА МГТУ(г.Мурманск),
кафедра Судовождения
I Применение систем динамического позиционирования
Основное назначение системы динамического позиционирования (ДП) – это автоматический контроль курса и позиции судна. Или, если быть точнее, динамическое позиционирование – удержание изменений курса и позиции судна в пределах допустимых границ при минимальном использовании подруливающих устройств.
Современный уровень техники, а также постоянно ужесточающиеся требования по обеспечению безаварийных работ и экологической безопасности при освоении шельфа стимулировали широкое применение на судах систем ДП. В настоящее время СДП разной конфигурации применяются на судах: транспортно-буксировочных, судах-снабженцах, трубовозах; научно-исследовательских, изыскательских, инженерно-геологических; пожарных, аварийно-спасательных; буровых; специализированных водолазных, обеспечивающих подводно-технические работы; крановых; трубоукладочных; полупогружных платформах; добывающих и перерабатывающих судах и платформах, плавучих нефтехранилищах (суда типа FSO, FPSO); ледоколах; танкерах.
II Установка ДП судна
Установка
динамического позиционирования судна - комплекс электронного оборудования,
включающий в себя систему ориентации и систему контроля, который определяет
местоположение судна с точностью до одного метра и удерживает судно в заданной
точке, автоматически управляя одновременно всеми судовыми движителями.
Системы ДП характеризуются большой энергоемкостью, высокой сложностью технической реализации и высоким уровнем автоматизации. Здесь комбинированно применяются подруливающие устройства различных типов, винт, рулевое устройство (см. рис. 1).
Подруливающие устройства располагают таким образом,
чтобы обеспечить максимальный момент и минимальное взаимное пересечение друг с
другом. ПУ туннельного типа располагают настолько ниже ватерлинии, насколько
это возможно. ПУ должны быть насколько возможно независимы, иметь собственную
систему экстренной остановки, мониторинга и сигнализации. Возможность
дестабилизации всей системы ДП из-за поломки одного ПУ должна быть минимизирована.
Так же должна быть обеспечена стабильная, надежная выработка энергии. Должно учитываться количество, местоположение и мощности имеющихся дизель-генераторов. Здесь главная задача – подача энергии на ПУ.
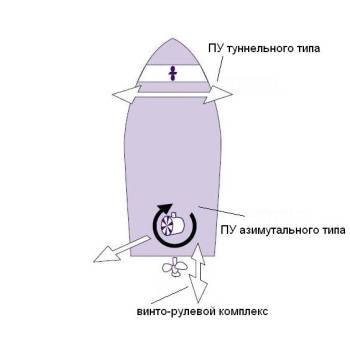
Рисунок 1. ПУ в системе динамического позиционирования
III Система
ориентации ДП
В
задачи системы ориентации ДП входит контроль географического
местоположения судна, относительной позиции, и отслеживание силы
воздействия погодных условий. На основе
полученных со всех приборов данных, произведенных оценок и математической модели судна, имитирующей его динамику,
вычислительный комплекс производит расчет и вырабатывает сигналы на ПУ. Системы
ориентации ДП включают в себя:
1.Системы определения
географического местоположения судна:
-судовая радиолокационная
система (РЛС) 3 и 10 см диапазона;
-судовой радиотепловой
локатор (РТЛ);
-импульснофазовая
радионавигационная система (ИФРНС) Лоран-С;
-спутниковая
радионавигационная система ГЛОНАСС, GPS;
- система EUROFIX.
2. Системы точного
определения позиции судна (должны отличаться по принципам действия):
- гидроакустические;
- системы туго натянутого
троса;
- гиперболические
разностно-дальномерные радионавигационные системы;
- лазерные системы.
3. Системы определения параметров
возмущающего фактора на корпус судна:
- курс;
- величину качки;
- скорости и направления
ветра.
IV Система контроля ДП
Основная задача системы контроля ДП - контроль удержания судна в установленной позиции, либо на установленной курсовой линии в пределах допустимых отклонений. Система должна быть способна справиться с изменением внешних сил, отказом оборудования для определения места судна или гирокомпаса, поломкой одного из подруливающих устройств. Вторичная задача системы контроля – минимизировать расход топлива и износ подруливающих устройств. Система контроля ДП – это циклическая система с обратной связью.
Суть простого цикла с обратной связью состоит в том, что изменение условий, определяемое оборудованием, вызывает создание противодействующей силы направленное на то, чтобы ликвидировать это изменение. Эффект изменения вновь обрабатывается и в случае необходимости цикл повторяется.
Система контроля с обратной связью является достаточно сложной из-за природы действующих внешних сил, и характеристик судна (см. рис. 2).
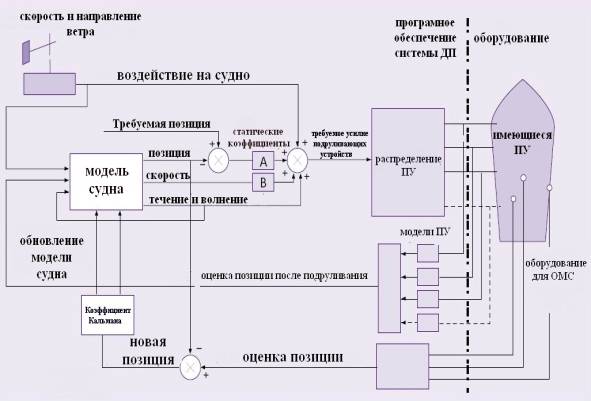
Рисунок 2. Система контроля ДП
В системе контроля ДП можно выделить две различные функции:
- Оценка отклонения судна от заданной позиции и расчет сил необходимых для возвращения судна в требуемую точку.
- Оценка воздействия сил окружающей среды, действующих на судно и расчет требуемых противодействующих сил.
Система контроля обычно действует именно в рамках первой функции. Вторая же функция приобретает особенно важное значение при работе в условиях шквалистого ветра.
Таким образом,
основными действиями системы контроля являются:
- измерение отклонения судна от заданной позиции и установленного курса;
- расчет отклонений в плоскостях X, Y, N;
- передача команд на определенные подруливающие устройства для создания противодействующих сил.
Чтобы выполнить
это, требуются:
- оборудование для определения смещения позиции судна относительно заданной точки;
- оборудование для измерения курса судна (обычно для этого используются показания гирокомпаса);
- оборудование для обсчета команд подаваемых на устройства, создающих противодействующие силы.
Система контроля
состоит из следующих компонентов:
- Статические коэффициенты. Определяют необходимые усилия подруливающих устройств в зависимости от различий имеющихся значений скорости и позиции с требуемыми.
- Распределение ПУ. Это система уравнений, в которых выражается общее требуемое усилие подруливающих устройств, выраженных через координаты X, Y, N. Затем это усилие распределяется на имеющиеся подруливающие устройства с учетом их характеристик.
- Имеющиеся ПУ.
- Модели ПУ. Модель принимает во внимание индивидуальные характеристики подруливающих устройств и рассчитывает общее усилие, прилагаемое к судну.
- Коэффициент Кальмана. Коэффициент, который может изменяться в пределах от 0 до 1. Определяет какой модели оцененной позиции стоит отдать предпочтение. Значение 0.5 означает их равнозначность.
- Направление и скорость ветра. На основании данных о направлении и скорости ветра рассчитываются силы, действующие на судно.
- Модель судна. Это максимально возможно точное описание поведения судна при действии различных внешних сил. Модель должна учитывать те силы, которые влияют на поведение реального судна: подруливающие устройства, ветер и волнение, течение, сила натяжения якорь-цепей, другие внешние силы (например, сила натяжения тросов, трубопровода)
Математическая модель судна должна быть максимально точной, но она все равно никогда не будет на 100% соответствовать реальному судну. Чтобы сделать ее максимально точной для данной ситуации в нее постоянно вносятся необходимые изменения.
Модель судна создает оценочные данные позиции судна, его скорости, сил течения и волнения. Эти данные сравниваются с требуемой позицией судна, введенной пользователем, скоростью и любыми другими силами, и после обработки создается команда для подруливающего устройства. Результат после подруливания вновь возвращается на обработку с тем, чтобы обновить модель судна.
Использование модели судна и коэффициентов Кальмана обеспечивает следующие преимущества:
- сигналы от датчиков фильтруются для уменьшения работы подруливающих устройств;
- явно ошибочные данные будут сравнены с моделью и отброшены;
- при отсутствии или потери вводных данных о позиции и/или курсе судно может оставаться под автоматическим контролем, используя расчетные данные, основанные на показаниях приборов за последние несколько минут. Это называется Контроль по Модели (КМ);
- позиционирование становится возможным при больших изменениях погодных условий, что позволяет судну расширить свои возможности.
Список литературы:
1. Симоненко, А.С. Устройство плавучих
буровых установок: Учебник: для ВУЗов/А.С.Симоненко - СПб.: ГМТУ, 1994. - 370
с.
2. Фрейдзон, И.Р. Автоматические системы
динамического удержания буровых судов/ И.Р. Фрейдзон, Л.Г.Филипов //
Судостроение за рубежом.- 1980.-№ 1.-С. 13-27.
3. Холодов, Г.Г. Требования национальных
морских классификационных обществ к работам на морских шельфах и системам
ориентации судов, оснащенных системами динамического позиционирования, и их
классификация /Г.Г.Холодов//Вестник МГТУ. Т. 13. - №4/1.- 2010. -
Стр.712-718.
4. Шостак, В.П. Некоторые особенности
проектирования плавучих средств освоения океана и континентального
шельфа/В.П.Шостак и др.//Навигация и гидрография. - №10.-2000. - С.47-58.