Доповідь/Технічні науки – Автоматизовані системи управління
на виробництві
УДК 681.51
Гутак О.В.,Головата
Ю.Б.,Семенцов Г.Н.
Івано-Франківський національний технічний університет нафти і газу
РОБАСТНЕ
ТА АДАПТИВНЕ УПРАВЛІННЯ ТЕХНОЛОГІЧНИМИ КОМПЛЕКСАМИ НАФТОГАЗОВИДОБУВНОЇ ГАЛУЗІ
Розроблення ефективних адаптивних
і робастних систем управління складними технологічними комплексами (ТК)
нафтової і газової промисловості є актуальною науково-прикладною задачею у
зв’язку з інтенсивним впровадженням в галузі комп’ютерно-інтегрованих
технологій [1,2]. Актуальність цієї задачі обумовлена ще й тим, що ТК
функціонують за умов істотної апріорної та поточної невизначеності щодо їх
параметрів і структури, а також навколишнього середовища, що виявляє себе у
вигляді контрольованих і неконтрольованих збурень і перешкод різного
походження. Вирішення цієї задачі пов’язано з розробкою адаптивних і робастних систем. Саме тому зусилля вчених
США, Західної Європи, України і Росії сконцентровані на розвиток теорій
адаптивного і робастного управління [1-3 та ін.].
Проте, аналіз
літературних джерел (наприклад, [1÷2 та ін.])
показує недостатній об’єм
проведених досліджень в напрямку використання методів
адаптивного і робастного
управління в нафтогазовидобувній галузі промисловості. Тому метою даної роботи
є аналіз можливостей застосування
методів адаптивного і робастного
управління ТК в нафтогазовидобувній галузі промисловості.
З існуючих наукових досліджень відомо [1,2], що за
структурою, режимами функціонування, показниками ефективності ТК нафтогазової
галузі промисловості відносяться до складних систем, в яких протікають процеси
і явища різної природи, різної тривалості, з різною кількістю координат стану
та можливих керувальних дій (рис.1).
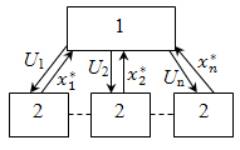
Рис.1.
Структура складної системи: 1 – центральний орган управління, 2 підсистеми, u – керувальні дії, x – вихідні змінні
Такоим чином, системна задача управління ТК має складатися з кількох
підзадач, які утворюють загальносистемну задачу.
Враховуватимемо, що ТК (бурові установки,
нафтогазовидобувні комплекси, компресорні станції, насосні станції та ін.) є
головними джерелами отримання прибутку підприємства, а їх надійне
функціонування безпосередньо впливає на витрату енергоресурсів, сировини,
матеріалів тощо. Останнім часом в дослідженнях таких складних об’єктів і систем управління ними
виділяють один клас організаційно-технологічних систем або
організаційно-технічних процесів.
Цей новий клас процесів має ознаки як
технічних, так і організаційних систем: багатовимірність; складність та
змінюваність структури; наявність та зміна багатьох цілей; недетермінованість;
активність та ін. Окрім цього наявність особи, яка приймає рішення, поряд з
позитивним аспектом (адаптивність, толерантність щодо зміни структури та
властивостей системи, суб’єктивна оптимізація), має і негативні сторони –
обмежений обсяг інформації, яка може перероблятися в реальному часі, зниження
надійності при втомі, запізнення в прийнятті рішень тощо. Проте, застосування в
системах управління лише формалізованих регулярних методів не приводить до
бажаних результатів, а евристичні способи часто є неефективними. З урахуванням
цих особливостей організаційно-технічних процесів в системах управління ними
доцільно застосовувати комбіновані підходи, які об’єднують формалізовані
регулярні методи, інтелектуальні підходи та еврістики.
При заданих величинах керувальних дій, а
отже заданій множині ![]() АСУ кожної з підсистем вирішує задачу максимізації своєї цільової функції і
визначає значення вектора хі*,
і = 1,2,…, n, який потім передається
в центральний орган управління. Отже, керувальними діями для підсистем є
множина Ui при і = 1,2,…, n, а вихідними змінними - сукупність
векторів х1*, х2*,…, хn*, які отримують після рішення локальних задач.
АСУ кожної з підсистем вирішує задачу максимізації своєї цільової функції і
визначає значення вектора хі*,
і = 1,2,…, n, який потім передається
в центральний орган управління. Отже, керувальними діями для підсистем є
множина Ui при і = 1,2,…, n, а вихідними змінними - сукупність
векторів х1*, х2*,…, хn*, які отримують після рішення локальних задач.
Одним із основних підходів є робастне і
адаптивне управління та їх поєднання. Слід зазначити, що системна задача
управління організаційно-технологічною системою передбачає ідентифікацію
ситуацій, оцінку стану та прогнозування розвитку подій.
Отже
підвищення ефективності управління технологічними комплексами нафтової і
газової промисловості слід шукати в побудові єдиного інформаційного простору,
об’єднанні різних етапів виробництва і застосування нових підходів і методів
управління – робастного і адаптивного.
Проте, якщо на першому етапі розвитку
цього підходу всі роботи з робастного оцінювання були присвячені розв’язку
регресійних задач, тобто ідентифікації статичних об’єктів, а також динамічних
об’єктів, які описуються рівняннями типу згортки, то сьогодні робастний підхід
використовується для адаптивного управління в тому числі і побудованого на
засадах нечіткої логіки в різних
галузях промисловості.
Слід відзначити, що складність синтезу
робастної системи полягає не в розв’язанні тих чи інших рівнянь, а, перш за все, у формуванні критерію якості
робастного управління таким чином, щоб синтезована система задовольняла
технічним вимогам, які висуваються до системи в цілому.
Отже, метою робастного управління є
забезпечення необхідної якості системи незалежно від змін параметрів системи,
зовнішніх збурень і можливих похибок з урахуванням особливостей об’єкта
керування, зміни його структури і параметрів. Робастна система повинна володіти
низькою чутливістю, належною якістю, стійкістю в широкому діапазоні зміни її
параметрів і невизначеностей: параметричної, структурної, алгоритмічної,
інформаційної, невизначеності зовнішніх впливів і т.п.
Реальна невизначеність передбачає дійсно
відсутність інформації щодо природи та характеристики збурень, крім їхньої
обмеженості.
Разом з тим метою адаптивного управління
об’єктами, які функціонують за умов невизначеності щодо параметрів об’єкта і
навколишнього середовища, що виявляє себе у вигляді контрольованих і
неконтрольованих збурень і перешкод різної природи, є здатність змінювати
алгоритми функціонування, структуру та параметри системи за рахунок
використання додаткових пристроїв та зв’язків, що дозволяють об’єкту своєчасно
пристосуватися до змінюваних умов роботи.
Проте, проблема адаптивного управління за
наявності довільних збурень розроблена явно недостатньо і вимагає усебічного
вивчення і розвитку. Особливо це стосується ТК нафтогазової промисловості, для
управління якими використовуються критичні системи керування, для яких
відхилення за межі цільових нерівностей є неприпустимим.
З існуючих наукових досліджень робастних та
адаптивних систем управління [1÷4 та ін.] відомо, що вони обидві орієнтовані на змінюванні умови
роботи, тобто між ними існує однозначна залежність. Саме поєднання цих двох
ефективних методів сучасної теорії управління з методами управління на базі
методів нечіткої логіки для автоматизації ТК нафтогазової промисловості
дозволяє використовувати переваги як адаптивних, так і робастних систем
управління, а також методів Fuzzy Control.
Прикладом ефективного поєднання адаптивної
системи з робастною є інтелектуальна система, яка може бути запропоновано для
управління технологічним процесом буріння нафтових і газових свердловин.
Особливістю такої системи є те, що вона не потребує значних матеріальних
витрат.
Робастна система функціонує в межах
однорідної за буримістю пачки гірських порід, не реагує на несуттєві зміни
фізико-механічних властивостей окремих прошарків порід, а інтелектуальний блок
виявляє момент переходу долота в породи іншої буримості. Після цього подається
команда на приєднання блоку адаптації і системи адаптивного керування, яка
здійснює пошук нових оптимальних параметрів режиму буріння для робастної
системи і після завершення пошуку під’єднує робастну систему до об’єкта.
Робастність системи
забезпечується вибором достатньо великого кроку дискретизації процесу зміни
механічної швидкості буріння, в результаті чого малі пропластки порід не
визначаються. На першому етапі функціонування такої системи вмикається
адаптивний регулятор. Він на основі інформації про зміну буримості чергової
пачки гірських порід за допомогою блоку адаптації знаходить певне рішення
стосовно оптимальної осьової сили на долото і пристосовується до нових умов
роботи системи. Інтелектуальний блок обробляє початкову інформацію за допомогою
бази даних, бази знань та блоку прийняття рішень і приймає відповідне ключове
рішення, на основі якого виконавчий механізм і перемикач переводять систему з
адаптивного режиму роботи на робастний. У цьому режимі відбувається процес
буріння до моменту виявлення чергової зміни буримості гірських порід. Цей
момент фіксується інтелектуальним блоком і система переводиться перемикачем в
адаптивний режим роботи. Внаслідок цього відбувається пошук нових оптимальних
параметрів режиму буріння. Після цього система знову переводиться в робастний
режим.
Висновок
На основі аналізу властивостей адаптивних і робастних систем
автоматичного управління, побудованих на використанні інтелектуальних
технологій управління, виділені переваги
робастних систем для управління
складними технологічними комплексами нафтогазовидобувної промисловості.
Проведена оцінка можливості застосування робастних систем для конкретного
технологічного комплексу і запропонована структура інтелектуальної системи
управління процесом буріння нафтових і газових свердловин.
Література:
1. Мислюк М.А. Моделювання явищ і процесів у нафтогазовій
справі М.А.Мислюк. - К.:Екор. - 1999. -
458 с.
2. Горбійчук М.І. Оптимізація процесу буріння глибоких свердловин: [навч.посібник] / М.І.Горбійчук,
Г.Н.Семенцов. - Івано-Франківськ: ІФНУНГ, 2003. - 493 с.
3. Кунцевич В.М. Синтез робастно устойчивых дискретных систем управления
нелинейными объектами;
доклады ХV междунар.конф. з
автоматического управления / В.М.Кунцевич // Одеса: ОНМА, 23-26 сентября. -2008.
- С. 296-299.
4. Skagestad S. Multivariable
Feedbock Control. Analysis and Design / S.Skagestad. - New York: Iohn Wiley &Sons, 1997. - 559 p.