УДК 681.5:691
Преподаватель
кафедры «ПиАТП» Еруланова А.Е.
Восточно-Казахстанский
Государственный технический университет, им. Д. Серикбаева
ДВУХКАНАЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ НЕПРЕРЫВНЫМ ДОЗИРОВАНИЕМ СЫПУЧИХ МАТЕРИАЛОВ
Разработан дозатор непрерывного действия, который
относится к дозирующей технике и может быть использован в системе непрерывного
автоматического дозирования сыпучих материалов в цементной,
горно-металлургической, дорожно-строительной, химической и других отраслях промышленности. Цель разработки заключается в повышении точности дозирования путем поддержания оптимальной погонной нагрузки, устранение
явления «зависания» дозируемого материала.
На
рисунке 1 изображена схема дозатора непрерывного действия, работающего следующим образом. Материал из
бункера 1 поступает на ленточный транспортер 3. Значение текущей погонной
нагрузки на ленте транспортера преобразуется весоизмерительным устройством 5.
Датчик скорости транспортерной ленты 4 преобразует скорость ленты в сигнал,
удобный для дальнейшего использования. Сигнал скорости транспортерной ленты с
датчика скорости транспортерной ленты 4 и сигнал текущей погонной нагрузки с
весоизмерительного устройства 5 поступает на вход множительного устройства 6.
Таким образом, на выходе множительного устройства формируется сигнал
производительности. Этот сигнал подается на устройство сравнения
производительности 8, где сравнивается с заданной производительностью,
формируемой задатчиком производительности 7 и направляется на регулятор
производительности 9. Регулятор
производительности 9 посредством
устройства для регулирования скорости для транспортерной ленты 10, электродвигатель 11 и редуктор 12 изменяет
скорость движения транспортерной ленты.
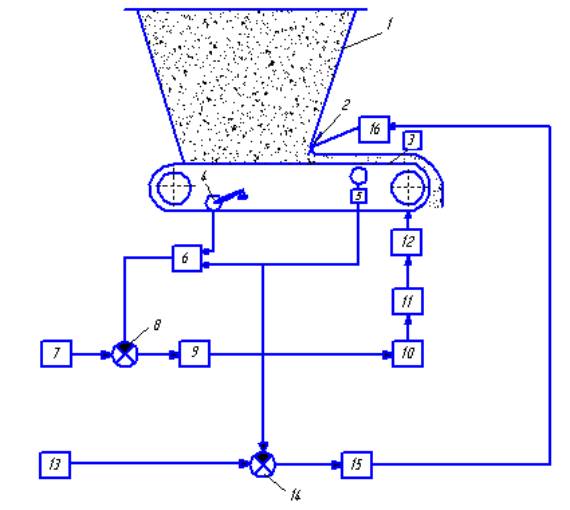
Рисунок 1 – Структурная схема дозатора непрерывного
дозирования
Сигнал текущей погонной нагрузки с весоизмерительного устройства 5 подается на
устройство сравнения погонной нагрузки 14, где сравнивается с задающим сигналом
от задатчика погонной нагрузки 13. Сигнал рассогласования поступает на регулятор погонной нагрузки 15 и формирует
управляющее воздействие на заслонку 2 с помощью привода заслонки 16.
В
результате такой работы поддерживается заданная погонная нагрузка,
соответствующая своему оптимальному значению и обеспечивается максимальная
точность дозирования.
Литература:
1. Григорьев Г.Г., Мальцев В.К., Толмачев А.Ф. Весовой
ленточный дозатор фирмы «Спенсер». «Испытательные машины, приборы автоматизации
взвешивания и дозирования» № 2(18), Москва, 1968 г. С. 34-38.
2. Патент №1002.
Республика Казахстан. Весовой дозатор непрерывного действия. Опубликован
1994 г.