К.т.н. Неженцев А.Б.
Национальный
технический университет Украины (КПИ), Киев, Украина
Испытание УСТРОЙСТВа
ДЛЯ ДИНАМИЧЕСКОГО ТОРМОЖЕНИЯ КРАНОВых механизмов
Для снижения уровня динамических нагрузок и энергопотребления грузоподъемных кранов разработано устройство для динамического торможения (УДТ) крановых механизмов передвижения и поворота [1]. УДТ позволяет реализовать следующие режимы динамического торможения: автоматический (без обратных связей); автоматический с отрицательной обратной связью от цепи ротора двигателя; управляемый (посредством педали).
С целью проверки работоспособности и надежности УДТ в
указанных трех режимах, а также проверки возможности формирования оптимальных
по динамическим нагрузкам и энергопотреблению характеристик двигателя в режиме динамического
торможения были проведены стендовые испытания УДТ. Кинематическая схема стенда
приведена на рис. 1.
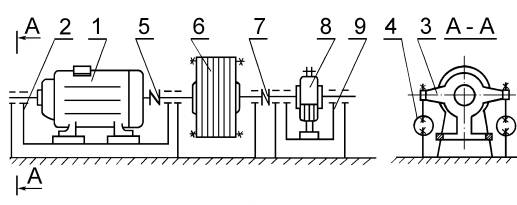
Рис. 1
Стенд содержит асинхронный электродвигатель с фазным
ротором 1, установленный на качающейся раме 2, которая через коромысла 3 соединена
с динамометрическими кольцами 4, прикрепленными к неподвижному основанию. Вал
двигателя с помощью муфты 5 соединен с вращающейся массой 6, состоящей из
дисков, количество которых можно изменять без демонтажа стенда в зависимости от
необходимого момента инерции. С другой стороны к вращающейся массе 6 через
муфту 7 присоединен тормозной шкив колодочного тормоза 8, установленного на
качающейся раме аналогично электродвигателю.
На рис. 2 представлены типичные
осциллограммы динамического торможения асинхронного электродвигателя МТF З12 – 8,
управляемого контроллером ККТ 61А. На осциллограммах
приняты следующие обозначения: IС - постоянный ток возбуждения, протекающий по обмотке
статора электродвигателя в режиме динамического торможения; n - частота вращения ротора электродвигателя; МДВ
-момент электродвигателя; UP –
выпрямленное напряжение обмотки ротора электродвигателя.
а) б)
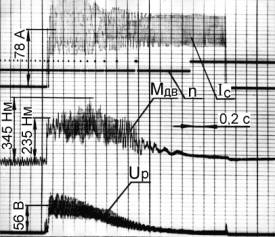
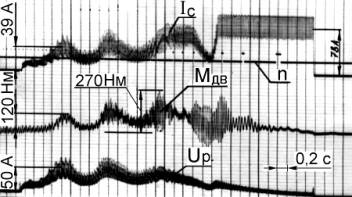
Рис. 2
Испытания показали, что минимальное время динамического
торможения привода получено при четвертом положении контроллера (сопротивление
резисторов в цепи ротора равно 0,19 Ом), а минимальное число оборотов двигателя
до остановки (характеризующее путь торможения) - при третьем положении
контроллера (сопротивление резисторов в цепи ротора равно 0,56 Ом, рис. 2а).
Осциллограмма на рис. 2б
показывает, что разработанное УДТ позволяет, путем воздействия на педаль, в
широких пределах изменять величину постоянного тока, подаваемого в обмотку
статора и управлять тормозным моментом двигателя в процессе динамического
торможения. Благодаря машинист крана имеет возможность формировать оптимальный
по быстродействию, динамическим нагрузкам и амплитуде раскачивания груза, процесс
торможения.
Наиболее эффективное управление моментом торможения
двигателя с помощью педали осуществляется в том случае, если рукоятка
контроллера находится в третьем или четвертом положениях. Это объясняется тем,
что в этих положениях момент торможения имеет наиболее широкий диапазон
изменения по величине. Наименее эффективное управление моментом двигателя
наблюдалось при установке рукоятки контроллера в пятое положении. При этом вследствие
небольшой величины напряжения в цепи ротора двигателя, вскоре после начала
торможения срабатывает блок контроля, что приводит к замыканию колодочного тормоза.
УДТ
рекомендуется для плавного торможения мостовых, козловых, башенных, портальных
и др. кранов. Автоматические режимы
динамического торможения желательно применять для кранов, работающих с
одинаковыми или близкими по массе грузами (грейферные, магнитные, разливочные и
др.). Управляемый с помощью педали режим динамического торможения целесообразно
использовать на кранах, осуществляющих погрузочно-разгрузочные работы с
различными по массе грузами.
Проведенные испытания показали, что УДТ обладает высокой надежностью и стабильностью
параметров при работе во всех трех режимах. По сравнению с традиционно
используемым торможением противовключением, УДТ позволяет осуществлять более
плавное торможение и значительно меньше потребляет электроэнергии. Использование предложенного УДТ в крановых механизмах
передвижения позволяет снизить динамические нагрузки металлоконструкций на
20-30%, амплитуду раскачивания груза в 2-2,5 раза, электропотребление на
15-18%, а также улучшить условия работы машиниста.
Литература
1. Неженцев
А.Б., Будиков Л.Я. Устройство для электродинамического торможения грузоподъемных кранов // Подъемные
сооружения. Специальная техника, №8(12). – Одесса, 2002. – С. 10-12.