Применение ЭВМ для анализа
шарнирно-рычажных механизмов
Полушкин О.А., Каныгин Г.И.
ФГБОУ ВПО «Донской
государственный
технический
университет»,
г. Ростов-на-Дону,
Россия
Анализ шарнирно-рычажных механизмов с позиций
теории механизмов и машин (ТММ) предусматривает решение множества задач
исследования кинематики и динамики их существующих конструкций. К настоящему
времени в ТММ разработаны как методы решения большинства этих задач, так и формализованные для использования ЭВМ
алгоритмы расчетов. Для решения отдельных из этих задач созданы программные
комплексы для ЭВМ. Однако, программные средства, охватывающие решение всех
задач такого анализа, а также соответствующий интерфейс, отсутствуют. Это
затрудняет решение многих вопросов проектирования машин и механизмов в учебном
процессе, не дает полного представления студентам о формализованных методах
решения задач ТММ на ЭВМ.
Программный комплекс, разработанный на кафедрах
«Теория механизмов и машин» и «Информационные технологии» ДГТУ, предназначен для кинематического и динамического
анализа плоских шарнирно-рычажных механизмов второго класса с низшими
кинематическими парами, с вращающимся входным звеном, с замкнутыми
кинематическими цепями, одной степенью подвижности, без избыточных (пассивных)
звеньев (связей). Каждое подвижное звено такого механизма может образовывать с
другими звеньями не более трех кинематических пар. Механизмы образуются
наслоением структурных групп Л. В. Ассура любых видов модификаций.
Программный комплекс реализует решения следующих
задач:
- определение траектории заданной точки любого
звена механизма;
- определение скоростей и ускорений заданной
точки или угловых перемещений, скоростей и ускорений заданного звена;
- определение радиуса кривизны траектории точки;
- определение главного вектора и главного
момента сил инерции звеньев;
- определение сил взаимодействия звеньев –
реакций в кинематических парах;
- определение уравновешивающих сил и моментов из
расчета механизма первого класса и по принципу возможных скоростей;
- подбор двигателя для данного машинного
агрегата;
- анализ переходных процессов пуска и приложения
нагрузки;
- расчет приведенных моментов сил и приведенных
моментов инерции в механизмах;
- анализ установившегося процесса работы
машинного агрегата;
- расчет маховика по допустимым значениям
коэффициента неравномерности хода и коэффициента динамической нагруженности;
- расчет геометрии и качественных характеристик
зацепления пары зубчатых колес;
- синтез планетарного редуктора.
Алгоритм расчета всех этих задач построен с использованием
известных методов теории механизмов и машин.
Рассмотрены типовые схемы элементов структуры плоских
шарнирно-рычажных механизмов:
L0 - механизм I
класса по Асуру Л.В.;
L1, L2, L3,
L4, L5 -группы 1-го, 2-го, … ,
5-го видов соответственно.
Для каждого из этих элементов с использование
метода замкнутых векторных контуров получены кинематические соотношения в
терминах «вход-выход», лежащие в основе алгоритмов и методов, реализованных в
программном комплексе.
Форме построения механизма соответствует массив
идентификации. Он содержит по 12 элементов в каждой строке, которые
характеризуют: номер текущей группы, номера звеньев текущей группы, выходные
параметры по соответствующим звеньям текущей группы номера звеньев предыдущей
группы. Число строк равно числу групп в формуле строения, включая механизм
первого класса.
В качестве средства разработки прикладного
программного комплекса был использован язык программирования Delphi 7.
Разработан интерфейс, который позволяет
формировать исходные данные и выводить результаты расчетов.
После запуска программного комплекса на экране
появляется основная форма, из которой должен быть выбран интересующий режим
работы и указан файл исходных данных.
Режим работы программного комплекса определяется
перечнем решаемых проектировщиком задач исследования. Файл исходных данных
содержит в себе информацию о числе групп механизма, функции направления
вращения входного звена, угловой скорости входного звена, угле начального
положения ведущего звена, шаге приращения угла.
После загрузки исходных данных и
выбора режимов работы производится расчет.
Результаты можно сформировать в единый
отчет и вывести на печать в MS Excel.
В качестве примера работа программного комплекса
апробирована рассмотрением кинематики и динамики долбежного станка - объекта
курсового проектирования по ТММ.
Долбежный станок предназначен для обработки
многогранных и фасонных поверхностей. Конструкция станка включает в себя:
- основной механизм, представляющий собой
шарнирно-рычажный механизм с качающейся кулисой (рис.1);
- кулачковый механизм;
- передаточный механизм.
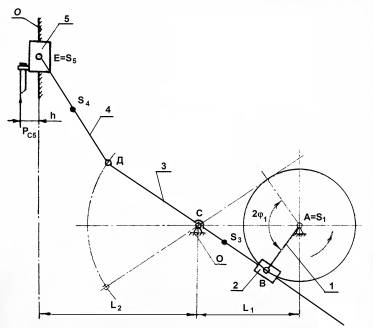
Рис.1. Схема
механизма долбежного станка
Основной механизм преобразует вращение
кривошипа в возвратно-поступательное движение звена 5, на котором укреплена
резцовая призма. При рабочем ходе механизма кривошип поворачивается на больший
угол, чем при холостом ходе, вследствие чего холостой ход осуществляется за
более короткий промежуток времени, чем рабочий. Исходные данные механизма
представлены на рис.2-4.
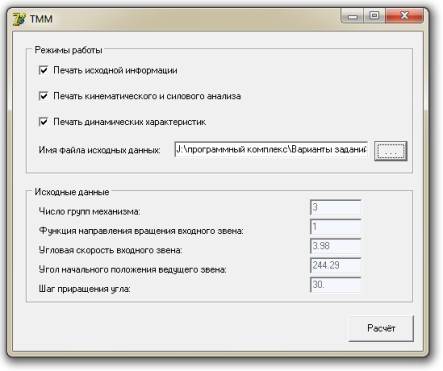
Рис.2. Основная форма
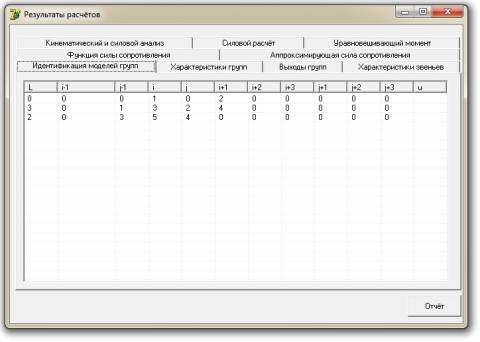
Рис.3. Идентификация моделей групп
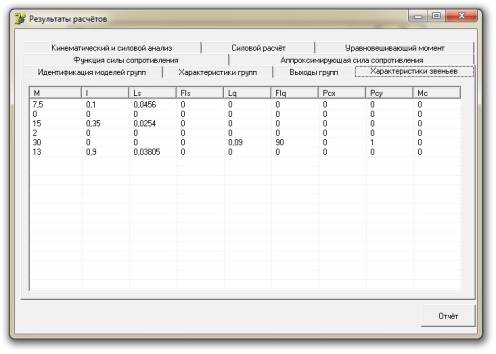
Рис.4. Характеристики звеньев
Результаты расчетов показаны на рис.5-7.
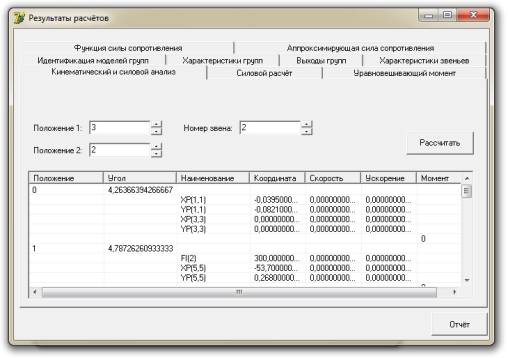
Рис.5. Кинематический анализ
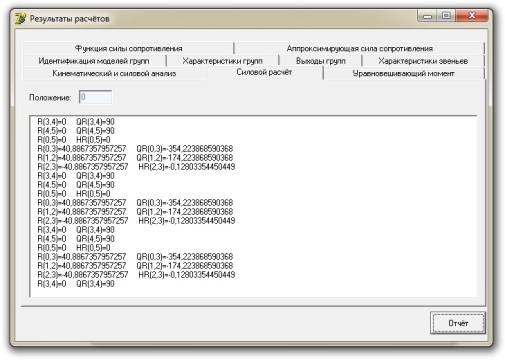
Рис.6. Силовой анализ
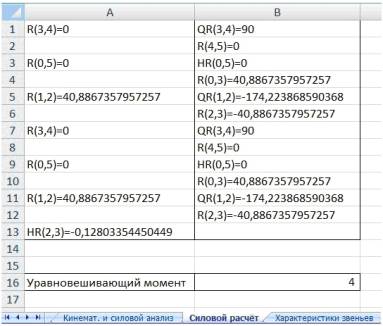
Рис.7. Силовой анализ в MS Excel
Программный комплекс может
использоваться студентами и
преподавателями вузов, сталкивающимися с проблемами исследования поведения
машин и механизмов при проведении курсового и дипломного проектирования. Кроме того, комплекс может успешно
использоваться в практике инженерных расчетов машин и механизмов.