Зизюк Ю.С., Скляр О.Н., Гурвич Ю.А.
Белорусский Национальный Технический Университет
Расчёт кинематической пары «винт – гайка», применяемой в
микрохирургии
Передача винт – гайка служит для
преобразования вращательного движения в поступательное.
В винтовых
механизмах вращение винта или гайки осуществляют обычно с помощью маховика,
шестерни и т.п. При этом передаточное отношение условно можно выразить отношением
окружного перемещения маховика SM к перемещению гайки
(винта) Sr :
![]()
где dm
– диаметр маховика; pi – ход винта.
Зависимость
между окружной силой Ft на маховике и осевой
силой Fa на гайке(винте) запишем в виде:
![]()
где h - к.п.д. винтовой пары.
Таким
образов, при простой и компактной конструкции передача винт – гайка позволяет
получать большой выигрыш в силе или осуществлять медленные и точные
перемещения.
Основной
недостаток передачи – низкий к.п.д. В соответствии с этим передачу винт – гайка
применяют в механизмах, где необходимо создавать большие усилия (домкраты,
прессы), а также в механизмах точных перемещений (механизмы подачи станков,
измерительные, установочные и регулировочные механизмы).
Разработано
много конструкций специальных винтовых пар, которые позволяют компенсировать
ошибки изготовления, зазоров и износа; обеспечивают очень большие передаточные
отношения (дифференциальная двойная резьба с разным шагом); повышают к.п.д.
путём замены трения скольжения трением качения (шариковые винтовые пары) и т.п.
Винтовой
механизм движения предназначен для преобразования вращательного движения (винта
или гайки) в поступательное перемещение l:
![]()
Винтовые
механизмы точного движения имеют большое применение в точных приборах благодаря
большому соотношению поворота винта (гайки) к поступательному перемещению и
возможности получения достаточно высокой точности при сравнительно простой
конструкции.
Возможны
четыре вида кинематических схем винтовых механизмов движения:
– Гайка неподвижна – винт вращается и движется
поступательно.
Этот вид винтового механизма даёт наибольшую точность. Однако габариты
механизма при данной схеме получаются наибольшими (равны сумме длины гайки и
двойной длины хода винта), поэтому такая схема, как правило, применяется при
малых длинах хода (до 25 – 50 мм). Примеры: измерительные микрометры, винтовой
окулярный микрометр и т.п. (рисунок 1).
– Винт вращается – гайка имеет поступательное
движение (рисунок
2). Габарит этого механизма почти
вдвое меньше (равен длине хода плюс длина гайки). Точность этого вида ниже,
конструкция сложнее.
– Гайка вращается – винт движется поступательно.
– Гайка совершает оба движения – винт
неподвижен.
Последние
два вида применяются очень редко, так как конструкция их сложнее, а точность
такого же порядка, как и у второй схемы.
Для винтов,
служащих для движения каких-либо частей со значительными нагрузками,
рекомендуется применять трапецеидальную резьбу, так как трение в резьбе
уменьшается с уменьшением угла профиля резьбы.
Наименьшим
трением обладает прямоугольная резьба, однако она трудна в изготовлении и
осевой люфт в паре труднее устранить.
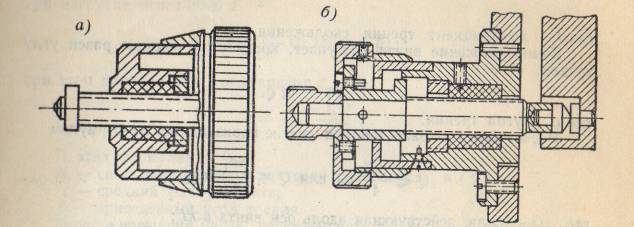
Рисунок
1. Отсчётные винтовые механизмы с полиэтиленовыми гайками
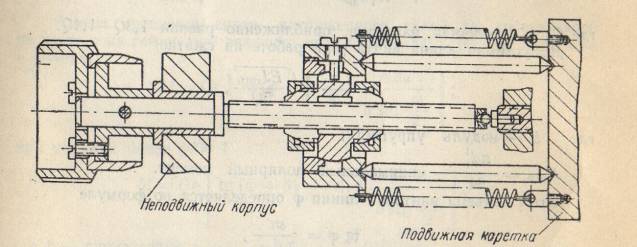
Рисунок
2. Винтовой механизм с перемещающейся разрезной гайкой
Расчёт винтовых механизмов
К.п.д.
ходового винта определяется по формуле:
где j - угол подъёма винтовой
линии;
a
- угол профиля резьбы.
Расчёт винта
на растяжение и сжатие производится по формулам:
![]()
где Q –
сила, действующая вдоль оси винта;
sр – допускаемое
напряжение на растяжение;
sсж – допускаемое
напряжение на сжатие;
d1 – внутренний диаметр резьбы винта.
Момент
вращения винта, нагруженного силой Q, действующей
перпендикулярно оси винта (без учёта сил трения в опорах) для гайки,
двигающейся только по винту:
![]()
Основным
критерием работоспособности этих резьб является износостойкость. В целях
уменьшения износа применяют антифрикционные пары материалов (сталь – чугун,
сталь – бронза и др.), смазку трущихся поверхностей, малые допускаемые
напряжения смятия (sсм). Значение sсм в ходовой резьбе
выражается такой же формулой, как и в крепёжной, а именно
