С.К. Лисин к.т.н., А. И. Федотов д.т.н.
СПб национальный минерально-сырьевой университет «Горный»,
СПб государственный политехнический университет, Россия
МАТЕМАТИЧЕСКИЕ МОДЕЛИ ВИБРАЦИОННЫХ РЕЖИМОВ
КОНТРОЛЯ
ЛИНЕЙНЫХ ПАРАМЕТРОВ
Создание научных основ методов измерений и контроля связано с
необходимостью построения теоретических моделей, обеспечивающих повышение
точности и эффективности средств измерительной техники. Становятся актуальными исследования
прогнозирования динамических режимов, способствующих повышению точности или не
обеспечивающих контроль требуемых параметров с помощью измерительных подвижных
систем.
Использование электромеханических измерительных систем,
подвергнутых динамическому анализу их режимов [1,2], позволяет расширить
области применения и повысить эффективность использования вибрационных, виброконтактных
и других средств измерений. Элементы и отдельные передачи подобных подвижных
систем применяются в устройствах промышленных роботов, в релейных системах
обрабатывающих центров, в специальных преобразователях, оснащаемых АЦП и ЦАП устройствами.
В практике измерения линейных размеров и перемещений применение
электромеханических преобразователей становится особенно необходимым [3,4].
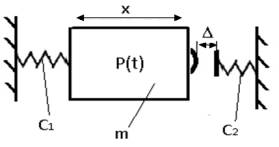
Рассмотрим математические модели колебательных
процессов подобных подвижных систем в режиме вибрационного контакта измерительного
наконечника с объектом контроля. Расчетная схема одномерного преобразователя
(рис. 1) содержит измерительный наконечник, схематизированный в виде
поступательно движущейся подпружиненной массы, соударяющейся с поверхностью контролируемого
объекта.
|
|
|
||||||||||||
|
Рис.1. Схема одномерного
преобразователя |
Рис.2.
Схема кусочно-линейной характеристики |
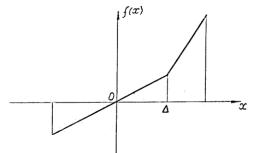
Восстанавливающая характеристика f(x) подобной
системы, в соответствии с методом кусочно-линейной аппроксимации, в первом
приближении представлена упругой
компонентой в виде кусочно-линейной двухзвенной несимметричной характеристики
(рис.2). На приведенной схеме (рис. 1) приняты обозначения: ![]() –
координата, отсчитываемая от положения статического равновесия;
–
координата, отсчитываемая от положения статического равновесия; ![]() –
масса измерительного стержня;
–
масса измерительного стержня; ![]() ,
,![]() –
жесткости упругого подвеса и измеряемого объекта;
–
жесткости упругого подвеса и измеряемого объекта; ![]() –
зазор между измеряемой поверхностью и равновесным положением измерительного
стержня.
–
зазор между измеряемой поверхностью и равновесным положением измерительного
стержня.
Исследуем математическую модель несимметричной системы (рис. 1) в режиме
вибрационного контакта измерительного наконечника с объектом контроля,
находящейся под действием гармонической возмущающей силы известной частоты ![]()
![]() ,
(1)
,
(1)
где
![]() – амплитуда возмущающей силы.
– амплитуда возмущающей силы.
Начальную фазу гармонического воздействия
полагаем нулевой. При этом нелинейная система
упругих характеристик в
безразмерной форме имеет вид:
 .
.
В общем виде областью определения функции ![]() является интервал [
является интервал [![]() ,
1]. Здесь
,
1]. Здесь ![]() – координата положения измерительного
наконечника (
– координата положения измерительного
наконечника (![]() ), отсчитываемая от равновесного положения;
), отсчитываемая от равновесного положения; ![]()
![]() . Областью определения функции
. Областью определения функции ![]() является интервал [1,
является интервал [1, ![]() ].
].
Характеристика ![]() в интервалах выражается двумя различными
функциями и не является линейной функцией. Такие функции, составленные из
отрезков и остающиеся однозначными в закрытом интервале, получили название
кусочно-линейных, а в смысле непрерывности – непрерывных по переменной
в интервалах выражается двумя различными
функциями и не является линейной функцией. Такие функции, составленные из
отрезков и остающиеся однозначными в закрытом интервале, получили название
кусочно-линейных, а в смысле непрерывности – непрерывных по переменной ![]() ,
так как не имеют точек разрыва
первого рода.
,
так как не имеют точек разрыва
первого рода.
Как правило, значения ![]() принадлежат малой области отклонений от положения равновесия, которая
предопределила область малых колебаний твердых тел. С учетом изложенного,
движение одномерного преобразователя представляется кусочно-линейной системой
дифференциальных уравнений. Дифференциальное уравнение вынужденных колебаний на
интервале
принадлежат малой области отклонений от положения равновесия, которая
предопределила область малых колебаний твердых тел. С учетом изложенного,
движение одномерного преобразователя представляется кусочно-линейной системой
дифференциальных уравнений. Дифференциальное уравнение вынужденных колебаний на
интервале ![]() записывается в виде
записывается в виде
![]() ,
(2)
,
(2)
где 


![]()

Аналогично, используя
принятые обозначения, на интервале ![]() имеем
имеем
![]() . (3)
. (3)
Режиму вынужденных колебаний на фазовой
плоскости соответствует замкнутая фазовая траектория. Время пробега
изображающей точкой всей фазовой траектории совпадает с периодом возмущающей
силы. Периоду возмущающей силы соответствует фаза контакта измерительного
наконечника, описываемая уравнением (3), и фаза свободного движения
измерительного наконечника, описываемая уравнением (2).
Для нахождения точных периодических решений
системы уравнений (2), (3) воспользуемся методом «припасовывания». Решения
уравнений (2),(3) относительно ![]() ,
,
![]()
![]() содержат произвольные постоянные интегрирования
содержат произвольные постоянные интегрирования ![]() ,
,
![]() , А3 , А4.
, А3 , А4.
Следуя
методу припасовывания, для уравнения (3) принимаем начальные условия:
![]() , (4)
, (4)
где ![]() –
момент времени, соответствующий вхождению измерительного наконечника в
контакт с поверхностью объекта
измерения. Конечные условия для уравнения (3):
–
момент времени, соответствующий вхождению измерительного наконечника в
контакт с поверхностью объекта
измерения. Конечные условия для уравнения (3):
![]() (5)
(5)
где
![]() –
момент выхода измерительного наконечника из фазы контакта.
–
момент выхода измерительного наконечника из фазы контакта.
Начальными условиями для уравнения (2),
описывающего движение в фазе без контакта, будут условия (5). Следовательно,
конечными условиями и одновременно условиями периодичности для уравнения (2)
являются условия
![]()
![]() ,
,
![]() . (6)
. (6)
Неизвестными
в периодических решениях являются постоянные интегрирования ![]() и параметры
и параметры ![]()
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
определяемые из решений системы из восьми уравнений, соответствующих (4-6).
,
определяемые из решений системы из восьми уравнений, соответствующих (4-6).
Максимальное
отклонение измерительного наконечника от положения статического равновесия ![]() вправо определяется из уравнения (3) и
условий
вправо определяется из уравнения (3) и
условий
![]() ,
, ![]() ,
, ![]() . (7)
. (7)
Максимальное
отклонение измерительного наконечника от положения статического равновесия ![]() влево
определяется из уравнения (2) и
условий
влево
определяется из уравнения (2) и
условий
![]() ,
, ![]() ,
,
![]() . (8)
. (8)
С помощью
периодических решений, соответствующих (3.34), (3.35) можно вычислить неизвестные ![]()
![]()
![]()
![]() .
Зная максимальные отклонения измерительного наконечника вправо и влево
.
Зная максимальные отклонения измерительного наконечника вправо и влево ![]() ,
,
![]() можно определить амплитуду
можно определить амплитуду ![]() и смещение центра
колебаний
и смещение центра
колебаний ![]() перечисленных
решений.
перечисленных
решений.
На основе использования условий (4-8) реализуется
динамическая задача системы, связанная с построением методом припасовывания
(«сшивания») решений нелинейных периодических режимов. Процедуры, связанные с
установлением функциональной зависимости между измеряемой величиной и
параметрами движения системы представляется замкнутой аналитической системой
определения неизвестных А![]() ,
А
,
А![]() ,
А
,
А![]() , А
, А![]() ,
, ![]() ,
,
![]() ,
,
![]() ,
,
![]() . Для определения неизвестных
. Для определения неизвестных ![]() используется система (7-8).
используется система (7-8).
Рассматриваемые соотношения
обеспечивают возможность с одной стороны синтезировать параметры измерительной
системы, а с другой – определить погрешность воспроизведения
амплитудно-частотной характеристики системы в режиме вибрационного контакта
измерительного наконечника [4].
Полученные
точные периодические решения недемпфированной системы, соответствуют
гармонической внешней нагрузке. Система решений позволяет построить резонансную
зависимость ![]() .
Рассматриваемая расчетная модель
строится с учетом упругих свойств измеряемого объекта и применяется для
конечных значений параметра
.
Рассматриваемая расчетная модель
строится с учетом упругих свойств измеряемого объекта и применяется для
конечных значений параметра ![]() .
.
Литература:
1.
Закржевский М.В. Колебания существенно-нелинейных систем.- Рига: Зинатне, 1980.
- 190 с.
2. Коловский
М.З. Нелинейная теория виброзащитных систем. - М.: Наука, 1966. - 318 с.
3. Федотов, А.И. Теория измерений /
А.И. Федотов, С.К. Лисин, Г.С. Морокина. – СПб.: Изд-во Политехн. ун-та, 2013.
– 324 с.
4. Лисин,
С.К. Технические измерения /С.К. Лисин, А.И. Федотов. – СПб.: Изд-во НМСУ
«Горный», 2012. – 66 с.