Кайнарбеков А.К.,
Муратов А.М.
Алматы,
Республика Казахстан
ШАГАЮЩЕЕ
КОЛЕСО ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ
Шагающие колеса [1] с шестью ногами (спицами)
обладают свойством наезжать на фронтальные препятствия с высотой Н (рис.1) равной радиусу колеса. Это
предельная высота проходимости шагающего колесного движителя. Такое колесо
имеет длину шага:
S
= Sш + Sк ; (м)
где: Sш=
rк ![]() tш – длина
шага в шагающем режиме;
tш – длина
шага в шагающем режиме;
Sк
= rк ![]() tк – длина
шага в колесном режиме;
tк – длина
шага в колесном режиме;
tш
– шаговый угол (рад) ;
tк
– колесный угол (рад) .
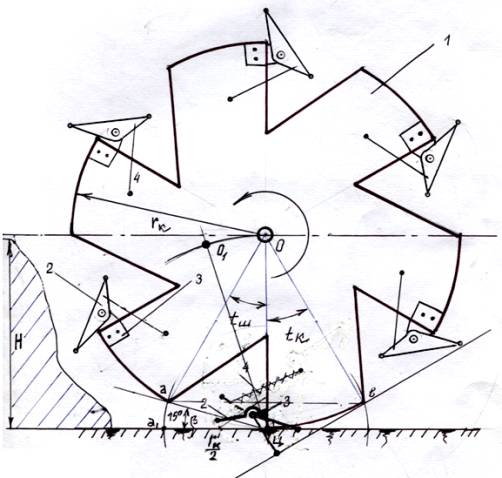
Рисунок 1 Шагающее
колесо
примем:
tш
= tк .
.
Тогда, S = rк (tш+tк) = rк![]() ≈ rк.
≈ rк.
Длину шага с небольшой точностью можно принять
равной длине радиуса колеса.
Из треугольника Δаца1, (рис.1) можно определить высоту аа1 падения наступающей ноги
колеса, т.е.
аа1
= ![]()
где: ![]() или
или ![]() т.к.
т.к.
из Δацо
видно, что угол у вершины О равен 300 , тогда угол ![]() ацо =750,
а угол
ацо =750,
а угол ![]() аца1 =150
(сумма этих углов равна 900).
Поэтому, высота падения носка наступающей ноги равна:
аца1 =150
(сумма этих углов равна 900).
Поэтому, высота падения носка наступающей ноги равна:
аа1
= ![]()
Шагающее колесо (рис.1), начиная из показанного
положения, вращается относительно мгновенного центра Ц и падает до точки пятки а
с высоты 0,13rк (м).
При этом, центр спутницы отклоняется
до положения О1 и
оказывается ниже прямолинейной траектории центра ступицы. Такое движение колеса
создает заметный дефект походки, который при спаривании нескольких колес,
создает дискомфорт езды транспортного средства.
Этот дефект походки
становится менее заметным при увеличении количества ног, допустим до 12-ти или
до 16-ти ног.
При этом, походка
шагающего колеса становится похожа на походку колеса с круглым ободом, т.к.
шаговый угол становится 130-150
или 110,5.
Согласно закона
движения [1] колеса:

при φ = 00÷120,
функции ![]() изменятся линейно. Поэтому
обеспечивается постоянство скорости движения спуницы.
изменятся линейно. Поэтому
обеспечивается постоянство скорости движения спуницы.
Но при этом терятся
высокая проходимость колеса.
Поэтому, в
работе [1] предлагается на пятку ступни
шести ножного колеса установить упругий каблук, который должен обеспечить
постоянство у0.
Однако, для
обеспечения прямолинейности троектории спутницы, т.е: для обеспечения у0 = ![]() оказывается,
необходимо на пятку установливать упругий элемент с нелинейной характеристикой.
Причем не с нарастающей жесткостью, а с убывающей жесткостью. Поэтому
практическое решение задачи усложняется.
оказывается,
необходимо на пятку установливать упругий элемент с нелинейной характеристикой.
Причем не с нарастающей жесткостью, а с убывающей жесткостью. Поэтому
практическое решение задачи усложняется.
Есть другой способ,
заключающийся в том, что в ноги на (шестиспицевого) шести ножного колеса установить фаланг карамыслового типа, который при наступлении на носочной
части ноги, поворачивается и отпускает свое второе плечо, конец которого
приземляется как промежуточная опора колеса, как бы заменяя функцию
дополнительной ноги. Тем самым колесо становится как двенадцати ножным. Шаговый
угол tш уменьшается до 150.
При этом, проходимость колеса не снижается, а дефект походки становится
незаметным, шагающее колесо приобретает легкость хода и перекатывается как
круглое колесо.
Фаланг выполнен как
двухплечее коромысло 2 (рис.2). К фаланге крепится подвижно коромысловый клин 5
и в центральной части фаланг соединяется с помощью консоли 3 к носковой части
ступни ноги 1.
Когда ступня ноги 1
перекатывается по опорной поверхности, первое плечо «К» фаланги 2 достигает опоры первым и начнет вращать второе плечо
вниз, а коромысловый клин 5 первым достигает опору «К1» , а затем фаланг его придавливает к опоре.
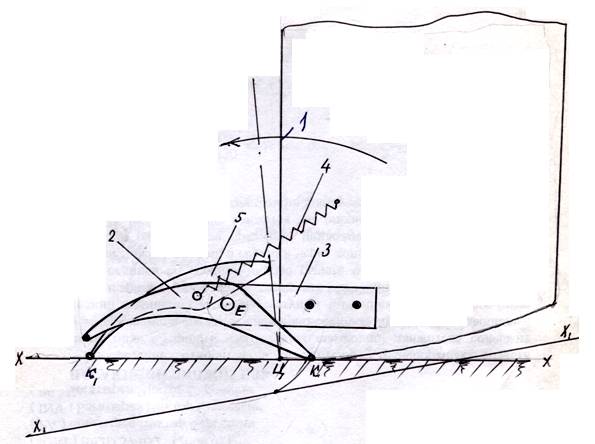
Рисунок
2 Фаланг
В таком положении
относительная подвижность фаланга и консоли 3 ноги в точке Е исчезает засчет
действия неподвижного клина 5. Начиная с этого момента колесо будет вращаться
относительно мгновенного центра «К1».
Такое колесо может
быть исползовано как ведущие колеса инвалидной коляски, а также в качестве
колеса велосипедов, приспособленных для езды по бездорожью.
Литература
1. Муратов А.М.,
Кайнарбеков А.К. «Шагающие движители»: Учебное пособие, «Бастау», г. Алматы,
2000. 182стр.
2. Муратов А.М., Омаров
А.Д., Кайнарбеков А.К., Сазанбаева Р.И. «Хикаят шагающего колеса»: г. Алматы,
2013. 227стр.
3. Муратов А.М.,
Сазанбаева Р.И. «Повышение проходимости колесных машин в условиях бездорожья»,
Бастау, г. Алматы, 2003.
4. Муратов А.М.,
Кайнарбеков А.К. «Гусенично-шагающий движитель транспортного средства»: пред.
патент РК №11006, г. Алматы, 14.11.2001, бюл.№12.
5. Омаров А.Д., Муратов
А., Кайнарбеков А., Бекмамбет К.М. «Бездорожное транспортное средства»: г.
Алматы, 2015г. 182стр.