Технические науки/11. Робототехника
Д.т.н. Ивель
В.П., к.т.н. Герасимова Ю.В.
Северо-Казахстанский
государственный университет
им.
М.Козыбаева, Казахстан
к.ф.-м.н.
Хачикян В.С.
Институт
математики и математического моделирования, Казахстан
Моделирующий комплекс
для полунатурных испытаний системы управления глубиной погружения
подводного аппарата
Создание
систем виртуальной реальности, компьютерных тренажеров и разного рода систем
моделирования стало уже традиционным подходом к решению многих серьезных прикладных
задач, связанных с проведением дорогостоящих натурных экспериментов [1]. В
рамках научно-исследовательских и опытно-конструкторских работ, проводимых в
СКГУ им. М.Козыбаева и АО
"ЗИКСТО" был изготовлен
комплекс аппаратно-программных средств
для системы управления глубиной погружения автономным необитаемым подводным аппаратом
(ПА).
Основное
назначение комплекса это проведение полунатурного моделирования с целью решения
следующих задач:
-
исследование методов
управлением вертикальным движением ПА, выбор базового закона управления,
оптимального по расходу энергии, отладка базовой программы;
-
разработка и отладка
тестовой программы для оперативной настройки и проверки работоспособности
бортового компьютера;
-
разработка интерфейса
для интерактивной связи бортового компьютера и системы измерения динамических
параметров системы управления;
-
диагностика всех узлов
системы управления, включая исполнительные механизмы и систему противодавления.
Создаваемый моделирующий
комплекс должен обеспечить в наглядной графической форме проверку эффективности
различных методов/алгоритмов управления, закладываемых в
программно-алгоритмический интеллект бортового компьютера. Принципиальной
основой его реализации является применение виртуальной реальности, имитационное
моделирование и высокая степень модульности. Отличительными особенностями комплекса
являются расширенные возможности визуализации для исследования различных
режимов управления движением ПА.
Структура программно-аппаратного
моделирующего комплекса представлена на рисунке 1.
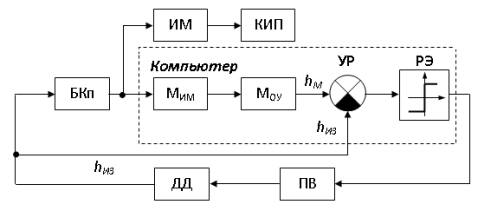
Рисунок 1. Общая структура комплекса
На рисунке 1 приняты следующие обозначения: БКп –
бортовой компьютер; МИМ – компьютерная модель исполнительного
механизма; МОУ – модель объекта управления; ИМ – исполнительный
механизм; КИП – контрольно-измерительные приборы; УР – узел рассогласования; РЭ
– релейный элемент; ПВ – поршневой вытеснитель; ДД – датчик давления; hИЗ – измеренная текущая глубина (давление)
нахождения ПА; hМ – модель текущей глубины.
Принцип работы комплекса
заключается в том, что бортовой компьютер выдает управляющие сигналы
одновременно на реальный исполнительный механизм и на его компьютерную модель,
последовательно с которой включена модель объекта управления, выходом которой
является модель текущей глубины ПА. Узел рассогласования сравнивает модельную
переменную глубины с ее значением, измеренным датчиком давления. Разность этих
сигналов подается на релейный элемент, который управляет работой поршневого
вытеснителя. Назначение ПВ – создавать давление на входе датчика давления,
пропорциональное переменной hМ, поскольку
ПВ не работает только в случае равенства сигналов hМ и hИЗ.
Функциональная
схема программно-аппаратного моделирующего комплекса представлена на рисунке 2.
Положенный в основу модульный принцип обеспечивает универсальность и гибкость,
необходимые для модернизации и адаптации комплекса к расширяемому кругу
прикладных задач [2].

Рисунок 2. Функциональная
схема комплекса для полунатурных
испытаний системы управления
глубиной погружения
На рисунке приняты
следующие обозначения: МР – объединенная модель объекта управления и
исполнительного механизма; РЭ – релейный элемент; КУ1, КУ2 – коммутационные
устройства; ЭПТ1, ЭПТ2 – электродвигатели постоянного тока; Кл – бесконтактное
реле (ключ); БВД – баллон высокого давления ПА; ИЗСр – имитатор забортной
среды; БК – балластная камера ПА; МКп –
управляемый механический клапан ВД; Кп1х – управляемые клапана для откачки воды
из БК; Кп2х – управляемые клапана для закачки воды в БК;
ВН – водяной насос; Ред – редуктор; xh –
электрический сигнал пропорциональный глубине нахождения (h) ПА; UУПР – сигналы на закачку и откачку воды; hИЗ – текущая глубина погружения.
Комплекс,
представленный на рисунке 2, включает в себя реальную систему управления
глубиной и вспомогательную систему для моделирования забортного давления. Реальная
система управления глубиной состоит из датчика давления (глубины), бортового компьютера,
коммутационного устройства, электрического водяного насоса, системы клапанов,
системы противодавления и балластной камеры. Вспомогательная система для моделирования
забортного давления состоит из модели регулятора, дополнительного
коммутационного устройства, дополнительного двигателя постоянного тока,
поршневого вытеснителя и камеры высокого давления для имитации забортного давления.
Работа комплекса
происходит следующим образом. В
начальный момент, соответствующий нахождению ПА на нулевой глубине (поверхность
водного бассейна, например, моря), включается в работу БКп, по команде
которого, начинается закачка воды в балластную камеру. Эта же команда поступает
на компьютерную модель регулятора. Результатом этой команды будет изменение
виртуальной глубины погружения (hМ) модели
ОР. На выходе эта виртуальная глубина сравнивается с глубиной, измеряемой
реальным датчиком давления – hИЗ. В зависимости
от знака рассогласования ∆ поршневой вытеснитель создает давление hИЗ на датчике ДД, которое должно соответствовать
виртуальной глубине hМ. Система
противодавления под влиянием перепада давления, созданного поршневым вытеснителем
с помощью баллона высокого давления, поддерживает давление в балластной камере,
равное забортному давлению.
Важным
элементом системы управления является исполнительный механизм, а точнее
электродвигатель постоянного тока. Качественные и количественные характеристики
ЭПТ существенно влияют на расход электроэнергии, особенно в режиме
установившихся автоколебаний ПА на заданной глубине [3].
Литература:
1.
Агеев М.Д. Киселев Ю.В.
и др. Автономные подводные роботы: системы и технологии. – М.: Наука, 2005. – 398 с.
2.
Герасимова Ю.В.
Быстродействующая система управления электродвигателем постоянного тока //
Вестник Павлодарского государственного
университета. Павлодар, 2010. – №1 – С. 69-73.
3.
Филаретов В.Ф., Лебедев
А.В., Юхимец Д.А. Устройства и системы управления подводных роботов. – М.: Наука, 2005. – 270 с.