On
the Question of an Unsearched Algorithm
to Identify
the Adaptive Model
Introduction
The paper deals with the parametric
identification, using unsearched identification algorithm with adaptive model
(UIAAM) [1]. The algorithm uses the idea of setting a minimum of the difference
(residual) outputs of a real object and model, excited by the same input signal
[2]. The unsearched algorithms are oriented to function in real time. Existing
UIAAM are designed for parameter identification.
UIAAM in the state space is
characterized that the process which is identified, the adaptive model and
algorithm of its settings are described in the state space, and the observed
(output) variables are functions of the state vectors.
With regard to UIAAM, in the
description of the process and the model we will limit by the function of the
observed value of x, u, t
![]() ,
,
where ![]() is identified parameter
of the process.
is identified parameter
of the process.
In
general, the characteristics of a custom model and the conditions of its
observation are regarded as different from the characteristics of the object
and functions of its observations, i.e. ![]() .
.
We are forming
some residual vector:
![]()
The task
of the UIAAM is to provide the norm of the error vector ![]() and the norm of the difference parameters
and the norm of the difference parameters ![]() in a specified sufficiently small area
in a specified sufficiently small area![]() .
.
The UIAAM function can be achieved by tuning
the algorithm model of the form: ![]() .
.
The block diagram corresponding to the
expressions is shown in Figure 1.
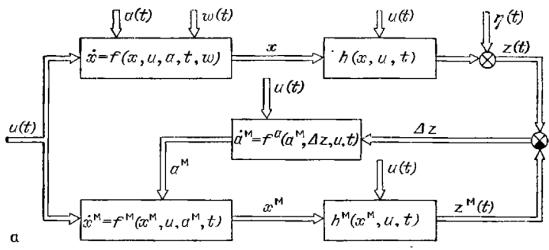
Fig. 1. Block diagram of the
algorithm
UIAAM for
continuous object as described in the state space
Let us consider
the case of linear object and the model of the first order.
The linear
and the linear model are been describing in the state space as follows:
![]() (1)
(1)
We consider the differences: ![]() ,
, ![]() ,
, ![]() .
.
All vectors![]()
![]() are considered directly observed (measured).
are considered directly observed (measured).
Subtracting the second equation of (1) from the first, we
find:
![]() . (2)
. (2)
Add and subtract to the
right side of equation (2)![]()
![]() :
:
![]() ,
,
then
![]() . (3)
. (3)
In (3) ![]() match the current configuration model and they
are known,
match the current configuration model and they
are known, ![]() is directly determined from the measured
values, as well as
is directly determined from the measured
values, as well as ![]() . Thus, the signal
observed discrepancy may be taken as:
. Thus, the signal
observed discrepancy may be taken as:
![]()
To ensure the
sustainability of the system, we use the Lyapunov’s function. The Lyapunov’s function
is sought in the form of the positive-definite quadratic form:
![]()
where ![]() are the positive-definite diagonal matrixes
of predetermined coefficients.
are the positive-definite diagonal matrixes
of predetermined coefficients.
We
have ![]()
Let
the values be
 (4)
(4)
then ![]()
Expression
(4) is transformed to
![]() . (5)
. (5)
This
algorithm cannot be accurately tuned to implementation to the model, as both ![]() and
and![]() are
not exactly known. However, at relatively slow change
are
not exactly known. However, at relatively slow change ![]() and
and ![]() or sufficiently large gain coefficients, the members
or sufficiently large gain coefficients, the members
![]() ,
,
![]() can be ignored and we can replace (5) by
the algorithm
can be ignored and we can replace (5) by
the algorithm
![]()
This algorithm is implemented by setting up the model. We
write it in matrix form, thinking that ![]() ,
,
![]() do not depend
on i
do not depend
on i
![]()
In accordance
with the criterion of the Lyapunov’s stability, this system will be stable at
the origin. Finally we have
![]()
![]() (6)
(6)
![]()
An example of the use of the technique
There is the set A = [-1, 1, -2 -3]. We have to provide the
identification of the parameters A, using the method UIAAM . We gather the scheme
of the original system model (Fig. 2) and the identifier (Fig. 3), according to
the equations (6).
The matrix B is assumed to be [1, 1]. The adjustment
coefficient k we define as [100 0, 0100]. The initial conditions of the
integrator in the loop identifier are equal to the initial value of the parameter
A.
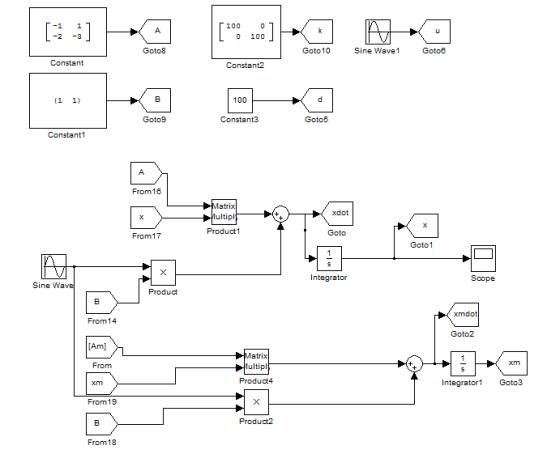
Fig. 2. The initial
system and its model in the Simulink environment
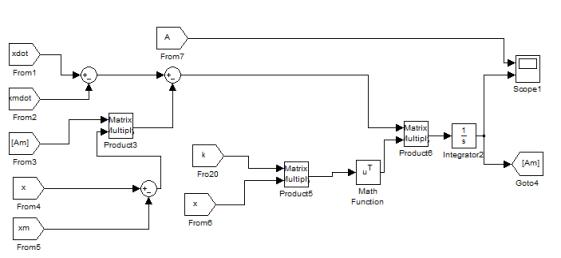
Fig. 3. Identifier of
the system in the Simulink environment
The
outputs of the identifier and the signals of the parameter A is presented in
Fig. 4.
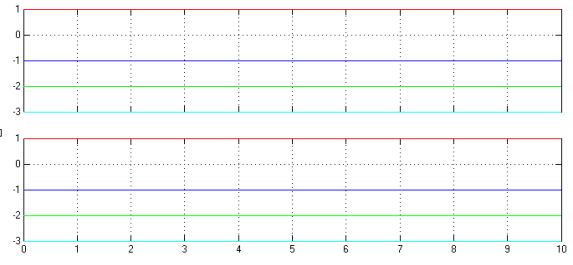
Fig. 4. The outputs of
the identifier and the signals of the parameter A
Based on the results
presented in Fig. 4, we verify the effectiveness and efficiency of the considered
method of identification.
References
1.
Krasovskij A.A. Handbook of the theory of automatic control.
– M.: Nauka, 1987. – 712 p.
2. Karabutov
N.N. Adaptive identification of a system. – M.: KomKniga, 2006. – 384 p.