Макаренко Р.Ю., Стульба М.А., Гурвич Ю.А.
Белорусский Национальный Технический Университет
Выбор метода
оптимизации при расчете количества вычислительных процедур при оптимизации
методом сеток
Прежде
чем приступить к выбору метода оптимизации, проанализируем с позиции
существующую методику построения зон, областей или картин устойчивости либо неустойчивости
движения управляемых колес на плоскости или в пространстве параметров по одному
из критериев, например, скорости устойчивого движения колес. Для этого необходимо
ответить на вопрос: в чем же выигрывает проектировщик, если одновременно варьировать
два, три или более значений параметров при неизменных величинах остальных в математическом
описании движения управляемых колес, по сравнению с изменением только одного
параметра (при неизменном значении остальных)?
Ответ
на поставленный вопрос получим после сравнения результатов вычислений по
выведенным в этом разделе формулам, определяющим:
-
количество совокупностей (или число сочетаний) значений параметров ![]() для n-мерного
пространства варьируемых параметров и различного числа уровней варьирования по
каждой n-мерной координате,
для n-мерного
пространства варьируемых параметров и различного числа уровней варьирования по
каждой n-мерной координате,
-
число зон устойчивости либо неустойчивости движения управляемых колес машины![]() (к1) при одновременном варьировании значений
сначала одного параметра (к1=1), затем двух (к1=2),…,(n-1),
при этом к1=n-1 значений n
параметров (к1=n) из совокупности, содержащей
n параметров, при неизменных значениях остальных значений в
этой совокупности параметров.
(к1) при одновременном варьировании значений
сначала одного параметра (к1=1), затем двух (к1=2),…,(n-1),
при этом к1=n-1 значений n
параметров (к1=n) из совокупности, содержащей
n параметров, при неизменных значениях остальных значений в
этой совокупности параметров.
Формулы
![]() и
и ![]() (к1) будем выводить для двух случаев, когда
число уровня варьирования по каждой n-мерной координате
различно -
(к1) будем выводить для двух случаев, когда
число уровня варьирования по каждой n-мерной координате
различно - ![]() ,
,![]() ,…,
,…,![]() (где i, j,…,
N- текущие порядковые номера уровней варьирования по каждой n-мерной
координате i=
(где i, j,…,
N- текущие порядковые номера уровней варьирования по каждой n-мерной
координате i=![]() ; j=
; j=![]() ; … ; N=
; … ; N=![]() , соответствуют количеству порядковых номеров уровней
варьирования) и когда это число одинаково
, соответствуют количеству порядковых номеров уровней
варьирования) и когда это число одинаково ![]() =
=![]() =…=
=…=![]() =λ и
=λ и ![]() =
=![]() =…=
=…=![]() =f. В последнем случае формулы
=f. В последнем случае формулы ![]() и
и ![]() (к1)
приобретают вид:
(к1)
приобретают вид: ![]() и
и ![]() (к1).
(к1).
Чтобы
установить вид формулы ![]() , рассмотрим рисунок 1.1, на котором изображена плоскость (n=2)
и пространство (n=3) совершенно различных по физическому смыслу
параметров с отличным друг от друга числом уровней варьирования по каждой из
трех координат:
, рассмотрим рисунок 1.1, на котором изображена плоскость (n=2)
и пространство (n=3) совершенно различных по физическому смыслу
параметров с отличным друг от друга числом уровней варьирования по каждой из
трех координат:
![]() ,
,![]() ,
,![]() , где i=
, где i=![]() ; j=
; j=![]() ; … ; k=
; … ; k=![]() .
.
Тогда
![]() =4,
=4,![]() =2,
=2,![]() =3.
=3.
Легко определить,что количество
совокупностей параметров на плоскости ![]() (рисунок 1.1,а) и в пространстве
(рисунок 1.1,б) соответственно равно:
(рисунок 1.1,а) и в пространстве
(рисунок 1.1,б) соответственно равно:
![]() =
=![]() *
*![]() ;
; ![]() =
=![]() *
*![]() *
*![]() ;
;
![]() =4*3=12;
=4*3=12; ![]() =4*
=4*![]() *3=24.
*3=24.

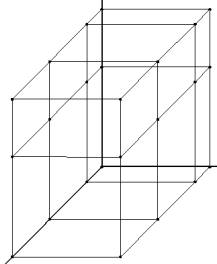
а) б)
Рисунок
1.1
В n-мерном пространстве
параметров количество их совокупностей, содержащих по n параметров каждая,
определяется следующей зависимостью:
![]() 1.3
1.3
Здесь
необходимо обратить внимание на следующее обстоятельство. В отличие от
произведения ![]() *
* ![]() *
* ![]() *…*
*…*![]() , которое определяет значение
, которое определяет значение ![]() , запись вида (1.3) является названием всего лишь одной из
совокупностей параметров в n-мерном пространстве (смотри рисунок 1.1).
, запись вида (1.3) является названием всего лишь одной из
совокупностей параметров в n-мерном пространстве (смотри рисунок 1.1).
Вывод
формулы ![]() (к1) при к=
(к1) при к=![]() будем осуществлять исходя
из предположения, что скорость движения управляемых колес является функцией совокупности
параметров V=V(
будем осуществлять исходя
из предположения, что скорость движения управляемых колес является функцией совокупности
параметров V=V(![]() ,
,![]() ,…,
,…,![]() ), которая представляет поверхность в n-мерном
пространстве.
), которая представляет поверхность в n-мерном
пространстве.
Рассмотрим
вариант, где скорость движения колес является функцией двух параметров V=V(![]() ;
;![]() ). Чтобы изучить эту поверхность в случае варьирования
величины одного из них при неизменном значении второго необходимо выполнить
следующее:
). Чтобы изучить эту поверхность в случае варьирования
величины одного из них при неизменном значении второго необходимо выполнить
следующее:
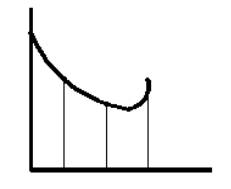
А)
Варьировать величину одного из параметров, например ![]() , при неизменной какой-либо одной из величин
, при неизменной какой-либо одной из величин ![]() , например
, например ![]() =const. При этом получим ряд точек
=const. При этом получим ряд точек ![]() =(где i=
=(где i=![]() ), через которые, используя методы оптимизации, можно
провести плавную кривую. Зависимость
), через которые, используя методы оптимизации, можно
провести плавную кривую. Зависимость ![]() =
=![]() (
(![]() ,
,![]() ) и представляет собой одну плоскую зону устойчивости и
неустойчивости (рисунок 1.2,б). Подобных зон устойчивости вида
) и представляет собой одну плоскую зону устойчивости и
неустойчивости (рисунок 1.2,б). Подобных зон устойчивости вида ![]() =
=![]() (
(![]() ,
,![]() ) нужно построить j=
) нужно построить j=![]() .
.
Б)
Помимо этих зон необходимо построить еще и число j=![]() зон устойчивости
вида
зон устойчивости
вида ![]() =
=![]() (
(![]() ,
,![]() ), где j=
), где j=![]() (рисунок 1.2,в).
Здесь варьируется величина
(рисунок 1.2,в).
Здесь варьируется величина ![]() при уже неизменной величине
при уже неизменной величине ![]() =(где i=
=(где i=![]() ).
).
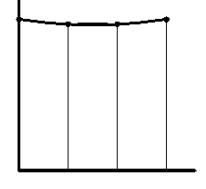
б) в)
Рисунок 1.2
Очевидно,
что полное количество плоских зон устойчивости соответствует числу
горизонтальных и вертикальных прямых, проведенных через соответствующие
совокупности параметров на плоскости двух параметров. Например, согласно рисунку
1.1(а) количество горизонтальных линий равно трем, а количество вертикальных
равно четырем. Следовательно, для изучения поверхности V(![]() ,
,![]() ) необходимо построить семь плоских зон устойчивости. А для
изучения, например, поверхности V(
) необходимо построить семь плоских зон устойчивости. А для
изучения, например, поверхности V(![]() ,
,![]() ), изображенной на рисунке 1.2(а), необходимо построить
восемь плоских зон устойчивости.
), изображенной на рисунке 1.2(а), необходимо построить
восемь плоских зон устойчивости.
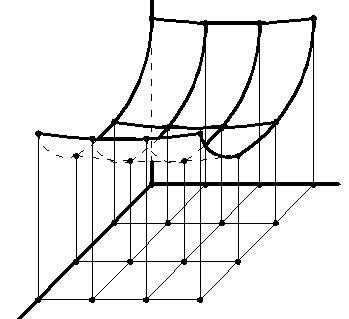
а)
рисунок1.2
Таким
образом, для изучения поверхности V(![]() ,
,![]() ) по методике, где варьируют значения одного параметра при неизменных
значениях второго, необходимо построить следующее количество плоских зон
устойчивости:
) по методике, где варьируют значения одного параметра при неизменных
значениях второго, необходимо построить следующее количество плоских зон
устойчивости:
Если одновременно варьировать величины двух параметров, то для изучения
поверхности V(![]() ,
,![]() ) необходимо построить всего одну область устойчивости,
изображенную на рисунке 1.3(а).
) необходимо построить всего одну область устойчивости,
изображенную на рисунке 1.3(а).
Таким
образом, оказалось, что при
одновременном варьировании n параметров
необходимо строить всего лишь одну n-мерную
картину устойчивости.
Это позволяет из имеющегося большого
количества методов нелинейного программирования выбрать методы случайного
поиска.
В результате нами выбран метод
Монте-Карло, который относится к случайному поиску. Необходимо подчеркнуть
основное достоинство метода Монте-Карло, заключающееся в его независимости от
условий задачи. С помощью генератора псевдослучайных чисел вырабатываются
точки, которыми просматривается многомерное пространство варьируемых параметров.