Распопов С.В. Николаенко Н.С. Гурвич Ю.А.
Белорусский национальный технический
университет
Предпосылки формирования механико-математической модели поворота
шарнирно-сочлененной машины с двумя осями
Исследований, посвященных
изучению динамики поворота шарнирно-сочлененных колесных машин на стадии
их проектирования. Данная работа
посвящена исследованию маневренности подземного самосвала БелАЗ-75800
(Рис.1). В основу конструкции
положен классический для подземных машин принцип компоновки: одноосный моторный
модуль, шарнирно соединенный с грузовой задней частью.

Рис.
1. Габаритные размеры самосвала БелАЗ-75800
Объективным показателем процесса поворота являются траектории движения характерных точек машины. По виду траекторий можно судить об устойчивости движения машины на повороте, о вписываемости в заданный динамический коридор движения при различных управляющих воздействиях (угловая скорость складывания). При выводе дифференциальных уравнений движения самосвала сделаны следующие допущения:
- подвеска обоих мостов жесткая и центры тяжести секций располагаются в продольных вертикальных плоскостях симметрии;
- гироскопические моменты на колесах и силу сопротивления воздуха не учитывают.
В процессе неустановившегося поворота каждое из колес машины движется по криволинейной траектории переменного радиуса. Боковые силы, действующие на колесе каждого моста, суммируются и в виде Pδ1, Рδ2 прикладываются к соответствующей оси (углы увода оси δ1 и δ2).
На рис. 2 представлена расчетная схема поворота машины с одним ведущим
мостом, где точки Оi
- мгновенные центры скоростей i–й
секции (![]() ); A, D – середины центров осей колёс; B, C – центры
тяжести секций машины; φi - углы курса i–й секции; θ – угол складывания; Ri – радиусы поворота i–й секции; P'fi, P''fi – силы
сопротивления прямолинейному движению; Рд1, Рд2 –
движущие силы на приводных колёсах.
); A, D – середины центров осей колёс; B, C – центры
тяжести секций машины; φi - углы курса i–й секции; θ – угол складывания; Ri – радиусы поворота i–й секции; P'fi, P''fi – силы
сопротивления прямолинейному движению; Рд1, Рд2 –
движущие силы на приводных колёсах.
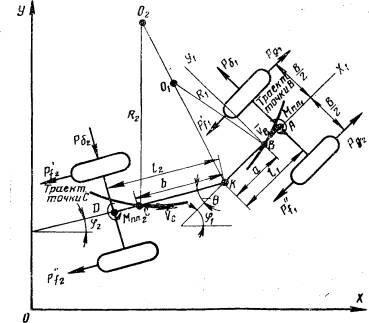
Рис.
2. Расчетная схема поворота шарнирно-сочлененной машины с одним ведущим мостом
Для вывода уравнений движения машины используем уравнения Лагранжа II рода.
![]()
где xi – обобщенные координаты; Т – кинетическая энергия; Qxi – обобщенные силы.
Положение шарнирно-сочлененной машины на плоскости определяется четырьмя
обобщенными координатами: координаты центра масс передней секции ХВ
и YB; угол курса передней секции φ1 и угол складывания ![]() (Рис. 3),где
(Рис. 3),где ![]() .
.

Рис.
3. Закон изменения угла складывания
Кинетическая энергия всей машины равна сумме кинетических энергий передней и задней секций

Кинетическая энергия машины в функции обобщённых координат имеет вид:
![]()
![]()
![]()
![]()