Неженцев А.Б.
Восточноукраинский национальный университет им. В.Даля
Анализ потерь энергии при торможении
кранов мостового типа
Краны
мостового типа, являясь одним из основных средств внутризаводского транспорта,
по сравнению с другим оборудованием имеют один из самых низких КПД. Поскольку в
Украине эксплуатируется около 35 тысяч указанных кранов, то решение задачи
снижения их энергопотребления является очень актуальным и обещает значительный
экономический эффект.
Большие
потери энергии обусловлены как устаревшими системами управления крановыми
электроприводами, так и нерациональными режимами работы механизмов (массовое
применение торможения противовключением и др.).
В
работах по теории электропривода [1, 2 и др.] как правило, используется упрощенный
подход, основанный на представлении машины в виде одномассовой модели. Поскольку
при этом не учитываются такие важные факторы как упруго - вязкие свойства металлоконструкции
крана, колебания груза и др., то такой подход для кранов оправдан только при
грубой оценке потерь энергии.
Для анализа потерь энергии в тормозных режимах мостовой
кран был представлен в виде трехмассовой расчетной схемы [3, 4], описываемой
системой нелинейных дифференциальных уравнений. При этом приведенная к ходовым
колесам сила электропривода ![]() , определялась в зависимости от тормозного режима работы
электродвигателя (противовключение -
, определялась в зависимости от тормозного режима работы
электродвигателя (противовключение - ![]() , динамическое торможение –
, динамическое торможение – ![]() ) по формулам:
) по формулам:
 ; (1)
; (1)  , (2)
, (2)
где ![]() ;
; ![]() - постоянные для j-ой искусственной характеристики двигателя;
- постоянные для j-ой искусственной характеристики двигателя;
![]() - критический момент
двигателя;
- критический момент
двигателя; ![]() - критическое скольжение на механической характеристике j;
- критическое скольжение на механической характеристике j; ![]() - скорости передвижения крана, соответствующие синхронной и
текущей частотам вращения ротора двигателя;
- скорости передвижения крана, соответствующие синхронной и
текущей частотам вращения ротора двигателя; ![]() - передаточное число привода; r - радиус ходового колеса;
η - коэффициент полезного действия механизма.
- передаточное число привода; r - радиус ходового колеса;
η - коэффициент полезного действия механизма.
На рис. 1 приведены механические характеристики
электропривода мостового крана в режимах противовключения (а) и динамического
торможения (б).
а) б)
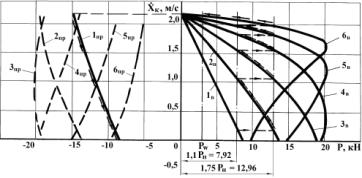
Рис. 1. Механические
характеристики электропривода мостового крана г/п 20 т в режимах: а –
противовключения; б – динамического торможения
В работе [5] приведены выражения, позволяющие
рассчитывать потери энергии в тормозных режимах:
- противовключения

 ; (3)
; (3)
- динамического торможения

 . (4)
. (4)
Интегрирование системы
нелинейных дифференциальных уравнений, описывающих движение мостового крана,
представленного трехмассовой расчетной схемой [3, 4], с уравнениями (1-4) осуществлялось
численным методом с помощью разработанной компьютерной программы [4].
На рис. 2 приведены
типичные графики потерь энергии при торможении мостового крана
грузоподъемностью 20/5т в режимах противовключения (рис. 2,а) и динамического
торможения (рис. 2,б).
а) б)
Рис. 2. Графики потерь энергии при
торможении мостового крана
г/п 20/5т в режимах: а–противовключения; б-динамического торможения
Анализ результатов исследований
показал, что в отличие от выводов, основанных на рассмотрении упрощенной модели
[1, 2 и др.], потери энергии в приводе передвижения крана существенно зависят
от вида механической характеристики. Так при торможении мостового крана г/п
20/5т в режиме противовключения потери энергии составляют от 452,0 кДж
(торможение по характеристике 1пр) до 706,2 кДж (торможение по
характеристике 6пр) т.е. отличаются в 1,6 раза. При динамическом
торможении крана по разным механическим характеристикам потери энергии
изменяется еще больше, поскольку форма механической характеристики зависит не
только от величины сопротивлений в цепи ротора, но и от многих других факторов
(вида возбуждения, величины тока возбуждения, схемы включения обмоток статора и
ротора двигателя и др.). Поэтому отличие между потерями энергии при противовключении
и динамическом торможении, составляет не три раза как приводится в литературе,
а может быть как значительно больше 1…3, так и меньше.
Проведенные исследования
позволили сделать следующие выводы:
- расчеты потерь энергии
при торможении мостовых кранов необходимо осуществлять с помощью математических
моделей, учитывающих все основные параметры электромеханической системы «привод
– металлоконструкция - груз», что позволяет значительно повысить точность расчетов;
- результаты исследований
показывают ошибочность выводов о том, что потери энергии не зависят от вида
механической характеристики. Отличие между потерями энергии, полученными при
торможении мостового крана г/п 20/5т по разным механическим характеристикам
составляет в режиме противовключения 1,6 раза, а в режиме динамического
торможения с независимым возбуждением – более чем 2,5 раза;
- проблема снижения
энергопотребления грузоподъемных кранов должна решаться в комплексе с задачами
снижения уровня динамических нагрузок и повышения производительности. Поэтому
задача обеспечения максимальной производительности грузоподъемных кранов при
минимуме энергопотребления может решаться как путем модернизации кранового
электропривода за счет применения частотного управления, так - и разработкой
алгоритмов оптимизации приводов кранов по обобщенному критерию и их реализация
с помощью микропроцессорной техники.
Литература
1. Основы автоматизированного электропривода / Чиликин
М.Г. и др. - М.: Энергия. –1974.- 568 с.
2. Ключев В.И. Теория электропривода. –М.:
Энергоатомиздат, 1985.–560с.
3. Неженцев А.Б., Аветисян С.М.
Повышение эффективности энергопотребления грузоподъемных кранов // Сб. трудов
научно-практической конференции «Перспективы рынка подъемных сооружений в
едином экономическом пространстве». – Одесса: Астропринт, 2004. – С. 114-122.
4. Аветисян С.М., Неженцев А.Б. Программное обеспечение для исследования переходных
процессов грузоподъемных кранов (часть 1: при работе механизмов передвижения) //
Підйомно-транспортна
техніка, №4(8). - Днепропетровск, 2003. –
с. 33-48.
5. Неженцев А.Б. Моделирование потерь энергии при
торможении грузоподъемных кранов // Materialy VII Międzynarodowej naukowi-praktycznej konferencji
«Nauka i
inowacja - 2011». Volume
16. Techniczne nauki.: Przemyśl. Nauka i
studia, 2011. – str.
68–70.