И. В. Щербань, д.т.н.,
профессор
Д. Е. Антонов, студент
Южный Федеральный
Университет (ЮФУ), Россия
КАЛИБРОВКА
МИКРОЭЛЕКТРОМЕХАНИЧЕСКИХ
АКСЕЛЕРОМЕТРОВ
Реализовано аппаратное и программное обеспечение
для калибровки моделей статических погрешностей микроэлектромеханических (МЭМС)
акселерометров. Экспериментальные исследования проведены на МЭМС-микросхеме LSM303DLH, включающей три акселерометра с
ортогонально ориентированными измерительными осями.
Введение
Перспективы
современного приборостроения связаны с созданием функциональных элементов,
обладающих малыми массой, габаритными размерами, энергопотреблением и
себестоимостью при безусловном выполнении целевой функции с заданной точностью.
Известно, что технологии микроэлектромеханических систем (МЭМС) обеспечивают высокий
уровень функциональности, надёжности и низкую цену конструируемых на их основе
измерительных преобразователей (ИП), например, инерциальных датчиков. Основными
недостатками таких датчиков являются сравнительно низкая точность,
зашумленность выходного сигнала, а также принципиальная невозможность
формирования на сегодняшний день точных моделей погрешностей ИП МЭМС. Последний
факт обусловлен нестабильностью этих моделей, сильной зависимостью модельных
параметров от внешних условий – от температуры, характеристик источника питания
и т.п. факторов. Таким образом требуется периодическая коррекция моделей
погрешностей ИП МЭМС в ходе их эксплуатации. Соответственно, представляет
интерес разработанный программно-аппаратный комплекс для исследования
статических погрешностей МЭМС микросхем, которые могут содержать до 3 акселерометров.
Схемотехническая реализация комплекса
Аппаратная часть реализованного комплекса
включает наклонно-поворотный стол (НПС), преобразователь выходных сигналов цифрового
выхода микросхемы МЭМС в протокол UART 2.0 (рис. 1) и ЭВМ.

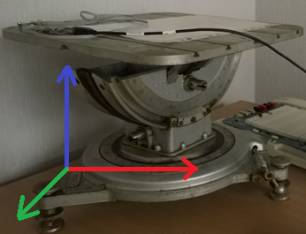
Рисунок 1 –
Наклонно-поворотный стол и
преобразователь выходных сигналов
в формат UART
НПС позволяет задавать требуемую ориентацию осей
чувствительности (ОЧ) акселерометров относительно плоскости горизонта с точностью
до 3 угл. мин. Указанной точности вполне достаточно для оценки погрешностей
датчиков такого типа. Так, погрешности измерений точно рассчитываемого в месте
испытаний гравитационного ускорения, обусловленные погрешностями выставки НПС, имеют
в этом случае порядок 10-6 м/с2. Шумовая же погрешность
акселерометров микросхемы, например,
LSM303DLH характеризуется среднеквадратичным отклонением (СКО) 0,015 м/с2,
что предопределяет порядок погрешностей в измерениях ускорений 10-2
м/с2.
Программное обеспечение
Программная часть комплекса реализована в Delphi
7.0. Программа обеспечивает съём информации с 3-х акселерометров, с
магнитометра и датчиков угловой скорости (при необходимости), перевод битов в
физические величины, запись данных в файлы данных и их статистическую обработку.
Разработана методика статистической обработки
записанных файлов измерений. Выполняется проверка шумов ИП МЭМС на гауссовость,
рассчитываются параметры шума – математическое ожидание, СКО и смещения нуля, определяется
наличие корреляционных связей между измерениями датчиков. На основе проведенных
расчетов формулируются рекомендации
по коррекции моделей погрешностей МЭМС акселерометров.
На рисунке 2
представлена панель программного комплекса для отображения текущих измерений
выходных сигналов ИП МЭМС.
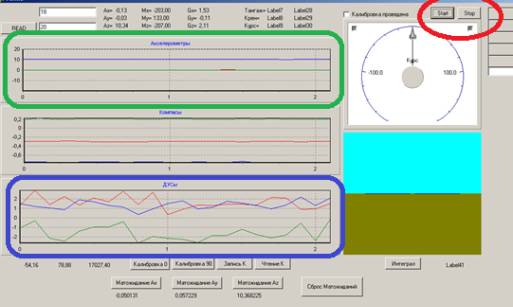
Рисунок 2 – Пример панели
программного обеспечения
Заключение
Разработанный программно-аппаратный комплекс
позволяет проводить калибровки моделей погрешностей акселерометров МЭМС
микросхем. Микросхема может содержать до
трех акселерометров.
При испытаниях оси чувствительности акселерометров
ориентируются необходимым образом относительно земных осей. По результатам измерений
выполняется коррекция моделей
статических погрешностей ИП.
Список литературы
1. Распопов В.Я. Микромеханические приборы. М.:
Машиностроение, 2007. 400с.
2. Коркишко Ю.Н. и др. Исследование работы БИНС в условиях высоких широт с учетом погрешностей реальных датчиков //Доклады XVI Санкт-Петербургской межд. конф. по интегрированным навигационным системам, 25-27 мая 2009, с. 57-60.