Д.э.н. Агарков С.А., д.т.н. Ю.И. Юдин
Мурманский государственный технический университет,
Россия.
Компьютерное моделирование движения
лагом не управляемого танкера при ветровом воздействии
В докладе рассматривается
компьютерное моделирование манёвров не управляемого танкера в условиях действия
ветра. Это предварительный этап исследований принципа управления танкером при
помощи отклонений двух разнесённых по диаметральной плоскости точек танкера от
линии прицеливания [1]. Показаны возможности моделирующей программы.
Для решения задач,
связанных с совершенствованием способов и методов выполнения швартовных
операций, на наш взгляд, следует, прежде всего, обратить внимание на методы и
способы применения современных компьютерных технологий на базе существующих
технических средств, используемых в судовождении. В данном случае имеется в
виду судовое навигационное и компьютерное оборудование, а также соответствующие
датчики позволяющие осуществлять непрерывный контроль за основными
кинематическими и динамическими параметрами движения судна, в частности, в
процессе выполнения им швартовной операции. На основании этой информации можно
управлять судном в соответствие с заданными сигналами управления, которые рассчитываются
по выработанным алгоритмам, исходя из обстоятельств, складывающихся в процессе
маневрирования.
Инновационный
принцип управления по отклонениям
носовой и кормовой точек судна от линии
прицеливания [1],требует проверки его
работоспособности. Эту проверку на сегодняшний день можно провести только,
используя средства компьютерного моделирования.Представленные материалы
демонстрируют применение такого моделирования в частном случае движения
танкера.
Исследованию движения
танкера в условиях управления по отклонениям от линии прицеливания предшествует
модельный эксперимент, раскрывающий характерные особенности движения танкера
лагом в условиях внешних воздействий.
При этом чисто лаговое
движение танкераможет протекать относительно непродолжительное время, поскольку
появляется вращающий момент, разворачивающийтанкер и меняющий характер
егодвижения.Для танкера это особенно верно, так как центр парусности танкера
смещен в корму за счёт значительной по площади кормовой надстройки. Для танкера
проекта AC-650вгрузу это смещение в корму достигает примерно 14 метров. Поэтому
именно система управления по отклонениям должна обеспечить поступательное
движение лагом для осуществления безопасной швартовки танкера.
В качестве
примера,представленырезультаты наиболее показательных модельных экспериментов
по движению танкера обеспечиваемого работой его двух подруливающих устройств
при заданной ветровой нагрузке, без работы системы управления по отклонениям от
прицельной линии.В рассматриваемом здесь случае подруливающие устройства
танкера работают в режиме сохранения постоянных значений их тяги. На
представленных ниже рисунках показаны траектории движения танкера, а также его
ориентация на траектории в определённые моменты времени.
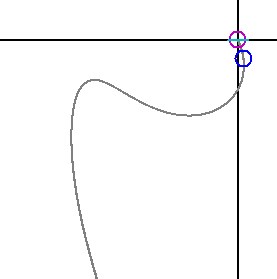
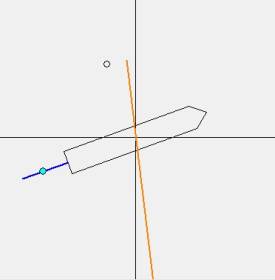
Рисунок 1 – Траектория и
положение на ней танкера, 205 с.
В частности, на
рисунке 1 слева показана траектория движения танкера в условиях ветра, имеющего
скорость 10 м/с и дующего с направления 330°, при этом начальный курс танкера
60°, а его движение происходит под воздействием носового и кормового
подруливающих устройств, обеспечивающих
постоянную суммарную тягу в 40 кН (2 по 20 кН) в направлении правого борта танкера.
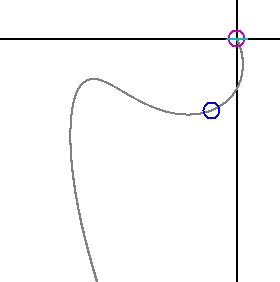
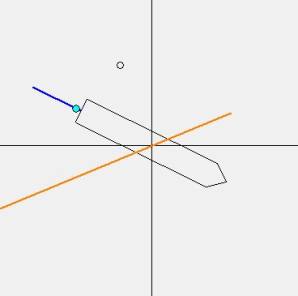
Рисунок 2 – Траектория и
положение на ней танкера, 440 с.
Кроме того, на рисунке
1 показано положение танкера (справа) на 205 секунде движения, синий кружок на
траектории – положениецентра тяжести танкера на указанной секунде. На рисунке 2
приведены те же данные на 440-ой секунде движения. Заметен существенный
разворот танкера под действием приложенных усилий от ветра и подруливающих
устройств.
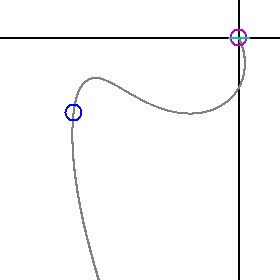
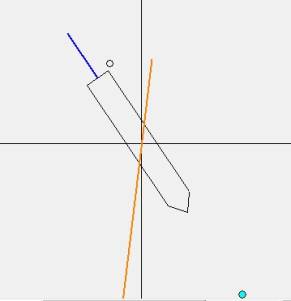
Рисунок 3 – Траектория и положение на ней
танкера, 1223 с.
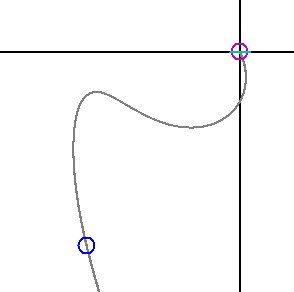
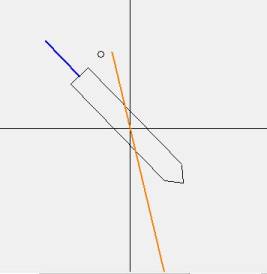
Рисунок 4 – Траектория и
положение на ней танкера, 1698 с.
На рисунках 3, 4 с
аналогичным содержанием представлено положение танкера при тех же условиях
движения на 1223-ей секунде и на 1698-ой секунде. Следует обратить внимание на
положение линии оранжевого цвета на
правых полях представленных рисунков. Это направление касательной к траектории
движения танкера в заданный момент времени, фактически направление движения
центра тяжести танкера в данный момент времени.
Таким
образом, на частном примере движения танкера под действием ветра показаны возможности программы моделирования
манёвров. Продемонстрированы возможности варьирования
различных параметров маневрирования, связанных с танкером и средой, а также
получение разнообразной информации, необходимой для причинно-следственного
анализа движения. Этим подтверждается
возможность применения компьютерной системы для решения задач по управлению
танкером по отклонениям.
Литература:
1. Пат. 2509031
Российская Федерация, МПК В 63 Н 25/52
(2006.01). Способ управления судном при
выполнении им швартовной операции к борту судна партнера, стоящего на
якоре / Юдин Ю.И., Иванов В.В., Холичев
С.Н., Петров С.О.; заявитель и патентообладатель Мурман. госуд. техн. ун-т.- №
2012143196/11; заявл. 09.10.2012 ;опубл. 10.03.2014, Бюл. № 7. – 9 с. : ил.