Д.э.н. Агарков С.А., д.т.н. Ю.И. Юдин
Мурманский государственный технический университет,
Россия.
Оценка качества управления танкером
по отклонениямот прицельной линии
Предложен способ
оценки качества управления танкером по отклонениямот прицельной линиидвух
разнесенных по длине танкера точек, расположенных в его диаметральной
плоскости. Способ используется при исследовании инновационного принципа
управления танкеромв сравнении различных вариантов реализации этого принципа.
Проводя модельные
испытания при исследовании принципа управления танкером по отклонениям от
прицельной линии[1], приходится сравнивать различные варианты реализации этого
инновационного принципа.Для этого необходимо вводить некоторые количественные
показатели качества управления – критерии качества управления танкером.
Из предложенных в
работах [2], [3]возможных критериев качества управлениямы выбрали два (Q1,Q2),
несколько модифицировав их. В частности, изкритерия Q1изъят член, зависящий от положения рулевого органа. Таким образом, значение критерия
определяется только изменением курса танкера К
![]() (1)
(1)
Это естественно, так
как при движении лагом наш рулевой орган находиться в нерабочем состоянии. В
критерии (1) К0 – направление прицельной линии, Кk – значение курса танкера в k-ый момент времени его фиксации.
Критерий Q2
в обычном виде не может отражать сущности проблемы. При движении лагом танкер
постоянно находится по одну сторону от прицельной линии, но маневрируя,
приближается к ней. Следовательно, просто складывать квадраты отклонений от
прицельной линии не имеет смысла, такая сумма не будет реагировать на рыскание
танкерав непосредственной близости от неё. Поэтому мы будем складывать квадраты
изменений отклонений носа и кормы танкера от прицельной линии:
![]() (2)
(2)
В критерии Q2,
df и da –
расстояния носовой и кормовой точек танкера до прицельной линии, нижний индекс kсоответствует значениям этих расстояний (отклонений) в
k-ый моментвремени фиксации. Суммы, входящие в
выражение (2) отнесены к одной точке,
делением на их общее количество, равное количеству секунд в испытании. Критерий
Q2был разделён на половину длины танкера, чтобы сделать его
безразмерным. Результаты проводимых испытаний сравнивались с точки зрения
качественной их оценки с учётом значений обоих критериев.
Проведены испытания
при различных значениях условно предельной тяги подруливающих устройств (ПУ)
танкераТе. Они выполнены для шести значений предельной тяги. На
рисунке 1 в качестве примера показаны три траектории танкера из этой серии
испытаний, в частности, для предельной тяги в 10, 30 и 50 кН.
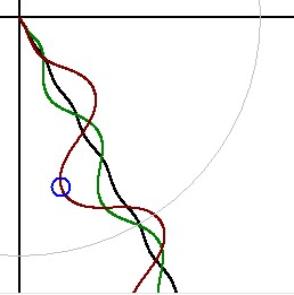
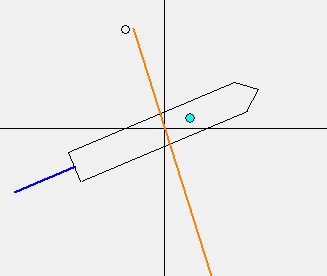
Рисунок 1 - Траектории
танкера (левое поле рисунка) при различных величинах предельной тяги ПУ: 10 кН
(черная), 30 кН (зеленая) и 50 кН (коричневая). На поле справа позиция танкера
относительно сторон света для его положения на «коричневой» траектории (синий
кружок, левое поле рисунка).
Импульс тяги dTе,
т.е. разовое изменение тяги при управлении движением танкера, был выбран равным
1.5 кН.
При проведении каждого
из указанных испытаний вычислялись значения критериев качества управленияQ1 и Q2,
которые приведены в таблице 1. Зависимость обоих критериев от величины тяги
монотонная, но разнонаправленная. Критерий Q1 растёт с увеличением
тяги Те, критерий Q2 убывает. Поэтому наилучшим по
комбинации критериев является промежуточное значение условно предельной тяги,
оно выбрано нами как Те = 20 кН. С этим значением и было выполнено
большинство испытаний.
Таблица 1 – Критерии
качества управления для шести значений предельных тяг ПУ (импульс тяги dTе=1.5 кН,
число контрольных точек 1800).
|
Tе, кН |
10 |
20 |
30 |
40 |
50 |
60 |
|
Q1 |
0.0182 |
0.0447 |
0.0746 |
0.1854 |
0.2695 |
1.2334 |
|
Q2 |
0.0039 |
0.0052 |
0.0063 |
0.0072 |
0.0080 |
0.0087 |
Следующая
серия испытаний была проведена при постоянной предельной тяге ПУ и изменении
величины её импульса dTе.
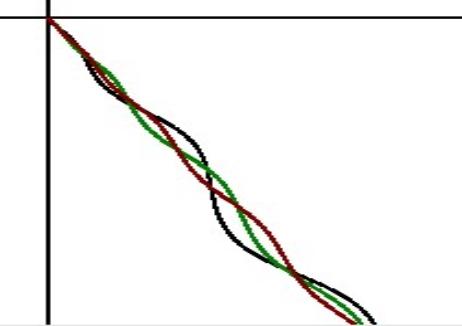
Рисунок 2 - Траектории
танкера при различных величинах
импульса тяги ПУ: 0.5 кН (черная), 1.5 кН (зеленая) и 3.0 кН (коричневая).
Было проведено шесть
испытаний, для трёх из них на рисунке 2
изображены траектории. Одновременно вычислялись и критерии качества, значения
которых приведены в таблице 2.
Таблица 2 – Критерии
качества управления для шести значений импульсов тяг ПУ (придельная тяга ПУ Tе=30 кН,
число контрольных точек 1800).
|
dTе, кН |
0.5 |
1.0 |
1.5 |
2.0 |
2.5 |
3.0 |
|
Q1 |
0.1697 |
0.1018 |
0.0746 |
0.0612 |
0.0508 |
0.0449 |
|
Q2 |
0.0065 |
0.0064 |
0.0063 |
0.0062 |
0.0061 |
0.0061 |
Данные таблиц 1 и 2
были обработаны в среде MathCad, где
получены аппроксимационные формулы зависимости критериев качества от предельной
тяги Те и от импульса тяги dTе при управлении танкером.В качестве примера на рисунке
3 показаны зависимости Q1(dTe),
Q2(dTe). Анализ всех полученных результатов позволяет
выбрать в качестве оптимальных для
управления танкером с использованием предложенного инновационного принципа
управления с использованием отклонений от прицельной
линии: максимальную тягу Те = 20 кН и импульс тяги dTе =
2 кН.

Рисунок 3 – Аппроксимация
зависимости критериев качества управления Q1( Q2), Q2(Q3) от импульса
тяги dТе(dT).
Введенные критерии
показали их согласие с интуитивной оценкой качества управлениятанкером по виду
траекторий.
Литература:
1. Пат. 2475410 Российская Федерация,
МПК В 63 Н 25/00 (2006.01). Способ управления судном при выполнении им швартовной операции к борту судна
партнера / Юдин Ю.И., Холичев С.Н., Петров С.О. ; заявитель и патентообладатель
Мурманский гос. техн. ун-т.- № 2011137696/11 ; заявл. 13.09.2011 ; опубл.
20.02.2013, Бюл. № 5. - 7 с. : ил.
2. Карасев А.В., Лукомский Ю.Л., Мусин Е.А. О
критерии оптимального управления курсом судна,
Судостроение, 1967, №4, -с. 36-40.
3. Антомонов Ю.Г. Расчёт
систем, оптимальных по быстродействию, Л.:Судостроение, 1964.