Д.э.н.
Агарков С.А., д.т.н. Ю.И. Юдин
Мурманский
государственный технический университет, Россия.
Влияние ветра на управление по отклонениямпри движении танкералагом
Рассмотрено влияние ветра на управление
танкером по отклонениямдвух разнесённых по его длине точек, расположенных в
диаметральной плоскости.При этом танкер выполняет условно третий завершающий
этап швартовной операции, т.е. движется лагом под действием системы управления
по отклонениям от линии прицеливания [1]. Оценена возможность выполнения такого
маневрирования при действии траверсного ветра.
Рассмотренные
ранее испытания проводились в условиях движения лагом и ветрового воздействия, но без управления танкером с
помощью изменения тяг подруливающих устройств (ПУ).Представим здесь отдельные
значимые результаты модельных
экспериментов, связанных с исследованием поведения управляемого по отклонениям
танкера в условиях действия ветра, при этом действиеветра моделировалось с траверсного направления. Это вызвано тем,
что мы рассматриваем следование в направлении прицельной линий без ориентации
центра тяжести танкера на заданное положение, т.е. ориентацию движения центра
тяжести танкера в заданную точку, расположенную на линии прицеливания. В этом
случае приходится говорить об управлении с выходом на «перекрестье», что не
является темой наших текущих исследований (но является темой исследовательского
коллектива кафедры судовождения). При следовании к перекрестью невозможно
обойтись одними ПУ, необходима работа главного движителя танкера,
обеспечивающего его продольное перемещение. Мы же здесь рассматриваем работу
только ПУ.
Проведено
испытание манёвров танкера, когда на него действует ветер с направленияqа = 150° и скоростью uа = 10
м/с. Начальный курс танкера К0 = 60°, максимальные тягиносового и
кормового ПУ Те = 20 кН, импульс тяг (величина шага изменения тяг
ПУ) dTe = 0.5 кН. В этих жеусловиях при отсутствии ветра
траектория движения танкера представлена зелёным светомна левом поле рисунка
1. Петля траектории движения
танкераобусловленауправлением его движением с целью выхода налинию
прицеливания.
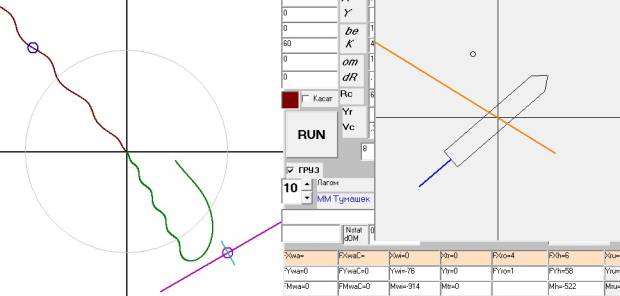
Рисунок 1 – Две траектории танкера в отсутствие ветра
и при действии ветра с направленияqa = 150° и uа= 10 м/с.
Радиус масштабной окружности 300 м.
В случае действия ветраuа = 10
м/с, траектория движения танкера существенно меняется (кривая коричневого цвета
на рисунке 1). Управление по отклонениям не выполняет поставленную задачу –
ветер, имеющий скоростьuа = 10
м/сне позволяет танкеру выйти налинию прицеливания (прямая линия фиолетового цвета
на левом поле рисунка). Но в качестве положительного момента в работе системы
управления движением танкерапри выводе его на линию прицеливанияследует отметить то, что танкер не разворачивается
под действием ветра, а дрейфует лагом к ветру, что подтверждается положение
танкера, показанного на правом поле рисунка. Следовательно, систему управления
по отклонениям можно использовать также дляуправления дрейфом танкера в определённом заданном положении к
ветру.
Объяснение полученного результата
модельного эксперимента в указанных условиях лежит на поверхности, так как
соотношение ветрового усилия (79 кН) и усилия, создаваемого ПУ (40 кН) не в
пользу последнего. Поэтому проведены ряд испытаний с вариацией предельных тяг ТеПУ
танкера и импульсов тяг dTe.
На рисунке 2 показаны в графической форме результаты модельного эксперимента
при придельной суммарной тяге ПУ равной 110 кН.

Рисунок 2 – Четыре траектории танкера при максимальной
тяге ПУ 110 кН и различных импульсах управления тягой: dTе=2 кН
(светло-зеленая), dTе=5 кН (красная), dTе=10 кН (чёрная),
dTе=15 кН (тёмно-зеленая). Радиус масштабной окружности 300 м.
Во всех случаях при такой максимальной
тяге,рассматриваемая здесь система управления выполняет поставленную задачу, то
есть танкер выходит на линию прицеливания. Качество управления при этом зависит
от величины импульса изменения тяги, хотя это качество видно зрительно по
рысканию танкера на траекториях, представленных на рисунке 2.
Это зрительное впечатление подтверждается
и при подсчёте критериев качества Q1 и Q2, приведенных в
таблице 1.
Таблица 1 – Критерии качества управления для пяти
значений импульсов тяг ПУ (Tе=110 кН, число контрольных точек измерения 1700).
|
dTе, кН |
2 |
5 |
10 |
15 |
20 |
|
Q1 |
0.3645 |
0.2624 |
0.2267 |
0.2166 |
0.2081 |
|
Q2 |
0.0096 |
0.0097 |
0.0095 |
0.0094 |
0.0094 |
![]()
![]()
В критерии Q1 К0
– направление прицельной линии, Кk – значение
курса танкера в k-ый момент времени его фиксации,
в критерии Q2, df и da – расстояния носовой и кормовой условных точек
диаметральной плоскости танкера до линии прицеливания [1], нижний индекс k соответствует значениям этих расстояний (отклонений)
в k-ый момент времени фиксации.
Из данных, представленных в таблице 1
видно, что оба критерия уменьшаются с ростом величины импульса, что и
подтверждает рост качества управления.
Этим мы доказываем, что для произвольного
действующего ветра с траверсного направления со стороны линии прицеливания
можно подобрать максимальную тягу ПУ танкера и импульс тяги так, чтобы система
управления по отклонениям работала эффективно.
Литература:
1. Пат. 2509031 Российская Федерация, МПК В 63 Н 25/52 (2006.01). Способ управления судном при выполнении им швартовной операции
к борту судна партнера, стоящего на якоре
/ Юдин Ю.И., Иванов В.В., Холичев С.Н., Петров С.О.; заявитель и патентообладатель
Мурман. госуд. техн. ун-т.- № 2012143196/11; заявл. 09.10.2012 ;опубл.
10.03.2014, Бюл. № 7. – 9 с. : ил.