Строительство
и архитектура/ 3.Современные технологии
строительства,
реконструкции и реставрации.
д.т.н.
Абрамов В.В., к.т.н. Иванюгин В.М., к.т.н. Петухов С.В.
Московская
государственная академия
коммунального
хозяйства и строительства
РОБОТИЗАЦИЯ отделки (шпаклевки) железобетонных
изделий
Робототехнический комплекс
для шпаклевочных работ
Повышение производительности
технологических процессов в производстве строительных материалов и изделий
является важной проблемой. Особенно актуальным является устранение ручного
труда при отделочных работах, упрощение обслуживания отделочных машин и
автоматизация их работы.
При изготовлении
железобетонных изделий по кассетной технологии и вибропрокатным методом их
поверхности имеют очень низкое качество. Для изделий кассетного производства
характерно наличие пор, сколов и трещин, образующихся при распалубке. Изделия, выпущенные вибропрокатным методом,
с одной стороны имеют крупношероховатую фактуру с неровностями, а с противоположной
- перепады от платин формующей ленты стана. Для устранения этих дефектов
необходимо шпатлевание поверхности изделий. Также шпатлевание применяется для
панелей наружных стен, поверхности которых подготавливают под окраску.
Целесообразно производить шпатлевание изделий на заводах механизированным
способом, это позволяет сократить затраты труда в 7 раз по сравнению с
выполнением этой операции вручную на стройплощадках.
Большинство машин работающих
сейчас в настоящее время на отделочных конвейерах были разработаны в середине
прошлого века и имеют существенные недостатки. К ним можно отнести большие
технологические потери шпаклевки, необходимость наличия нескольких рабочих для
их обслуживания. Самый главный недостаток, заключается в отсутствии возможности
автоматизировать работу существующих отделочных
машин. Существующие способы отделки свежеотформованных панелей отличаются
большой трудоемкостью при их ручном и даже механизированном исполнении (рис. 1). Технология нанесения и
затирки отделочного состава, конструкции узлов, механизмы взаимодействия с
конвейером, были изначально разработаны без учета возможности автоматизации.
Тем не менее, разработка робототехнического комплекса для шпаклевочных работ
является весьма актуальной [1].

Рис. 1. Механизированная
обработка стеновой панели
На кафедре «Машины и
оборудование заводов строительных материалов, изделий и конструкций» (МГАКХиС)
проводится комплекс работ по роботизации проведения отделочных операций ЖБИ,
т.к. они являются одними из самых трудоемких. Результатом ее стал проект
отделочной машины [2,3], которая позволяет снизить количество рабочих на посту
отделки железобетонных панелей, снизить
технологические потери отделочных материалов, повысить производительность и
производить продукцию высокого качества. Дальнейшая модернизация шпаклевочной
машины для отделки внутренних стеновых панелей предполагает разработку системы
технического зрения (СТЗ) для
позиционирования обрабатываемого изделия [4].
Рабочие органы большинства
существующих отделочных машин представляют собой балки (с установленными на них
резиновыми или металлическими шпателями), совершающие поступательные или
плоскопараллельные движения,. Длина этих шпательных балок чаще всего
соответствует ширине обрабатываемых изделий, и с помощью них растирают
шпаклевочную смесь по всей площади панели, независимо от наличия проемов. При
нанесении шпатлевки на панель механическим способом также не учитывается
наличие проемов, это приводит к большим технологическим потерям. В некоторых отделочных машинах перед
затиркой шпаклевка на панель наноситься вручную или с помощью штукатурных, малярных агрегатов. Такая технология отделки
имеет малую производительность и
требует дополнительного рабочего.
Специально для шпаклевочного
робота был разработан рабочий орган, сочетающий в себе форсунки для подачи
отделочной смеси и шпатели, расположенные на вращающемся диске. Этот рабочий
орган гораздо лучше подходит для отделочного робота, чем те, которые
применяются в большинстве шпаклевочных машин.
Дисковый рабочий орган,
снабженный форсунками и шпателями, при задании ему траектории движения
зависящей от конструкции панели, позволяет качественно и практически без потерь
отделочного состава обрабатывать изделия со сложной и разнообразной геометрией.
Наиболее востребован
робототехнический комплекс для шпаклевочных работ на вертикальных отделочных
конвейерах, они широко распространены на заводах ЖБИ, в основном на таких
конвейерах производят отделку панелей перекрытий, панелей внутренних стен и
панелей наружных стен. Особенностью этих конвейеров является то, что на них
обрабатывается широкая номенклатура изделий и то, что установка изделия на
конвейер производиться мостовым краном с большой погрешностью, которая
составляет десятки сантиметров. В таком случае обработка изделия по жесткой
программе задающей траекторию движения рабочего органа становиться невозможной,
из-за того, что координаты края панели
относительно поста отделки будут различными у каждой панели.
Ввиду различий типоразмеров
панелей, рабочий орган перемещается по «своей» заранее рассчитанной траектории
для каждой панели (как для станка с ЧПУ). Поэтому система из отделочной машины
с тремя степенями подвижности рабочего органа, вместе с СТЗ и числовым
программным управлением представляет собой мехатронный робототехнический
комплекс.
Назначение систем
технического зрения
Использование технического
зрения на основе твердотельных камер или лазерного дальномера и других методов
очувствления диктуется необходимостью повышения гибкости и расширения области
применения робототехнических систем в стройиндустрии. Хотя датчики расстояния,
силы и тактильные датчики играют большую роль, именно телевизионные СТЗ (далее
СТЗ) является наиболее полным источником информации для позиционирования и
управления движением рабочего органа роботов.
Зрение робота можно определить
как процесс выделения, идентификации и преобразования информации, полученной из
наблюдаемых трехмерных сцен. Этот процесс, называемый также техническим или
машинным зрением, разделяется на несколько основных этапов [2-6]: получение
информации (видео или фото изображений), предварительная обработка информации,
сегментация, описание, распознавание, интерпретация. Приведенную классификацию
можно рассматривать как практический метод реализации СТЗ различного
назначения.
Таким образом, установив СТЗ
на робототехническом комплексе для безотходной
шпаклевки железобетонных изделий, можно исключить человека из
производства бетонных плит на данном этапе. Главная цель создания системы
технического зрения на данный момент – калибровка рабочего органа робота
шпаклевщика относительно обрабатываемого им изделия. Чтобы достигнуть главной
цели, нужно решить несколько взаимосвязанных задач в соответствии с
вышеприведенными этапами.
Получение изображения,
используемые технические средства
Визуальная информация
преобразуется в электрические сигналы с помощью видеодатчиков. После
пространственной дискретизации и квантования по амплитуде эти сигналы дают
цифровое изображение. В разрабатываемой СТЗ в качестве датчика используется
веб-камера.
Современная веб-камера
представляет собой цифровое устройство, производящее видеосъемку,
преобразование аналогового видеосигнала в цифровой, сжатие цифрового
видеосигнала и передачу видеоизображения по компьютерной сети. Поэтому в состав
веб-камеры входят следующие компоненты (рис. 2): ПЗС-матрица, объектив,
оптический фильтр, плата видеозахвата, блок компрессии (сжатия)
идеоизображения, центральный процессор и встроенный веб-сервер, ОЗУ,
флэш-память, сетевой интерфейс, последовательные порты, тревожные входы/выходы.
В качестве фотоприемника в
большинстве веб-камер применяется ПЗС-матрица (ПЗС, CCD – прибор
с зарядовой связью) – прямоугольная светочувствительная полупроводниковая
пластинка с отношением сторон 3 : 4, которая преобразует падающий на нее свет в
электрический сигнал. ПЗС-матрица состоит из большого числа светочувствительных
ячеек. Для того чтобы повысить световую чувствительность ПЗС-матрицы, нередко
формируют структуру, которая создает микролинзу перед каждой из ячеек. В
технических параметрах веб-камеры обычно указывают формат ПЗС-матрицы (длина
диагонали матрицы в дюймах), число эффективных пикселей, тип развертки
(построчная или чересстрочная) и чувствительность.
Рис. 2. Устройство и основные
компоненты веб - камеры
Объектив – это линзовая система, предназначенная
для проецирования изображения объекта наблюдения на светочувствительный элемент
веб-камеры. Объектив является неотъемлемой частью веб-камеры, поэтому от
правильности его выбора и установки зависит качество видеоизображения,
получаемого веб-камерой. Достаточно часто веб-камера комплектуется объективом.
Объектив характеризуются рядом важнейших параметров, таких как фокусное
расстояние (F), относительное отверстие (D), глубина резкости, тип крепления,
формат.
Оптические инфракрасные
отсекающие фильтры,
которые устанавливают в веб-камеры, представляют собой оптически точные
плоскопараллельные пластинки, монтируемые сверху ПЗС-матрицы. Они работают как
оптические низкочастотные фильтры с частотой среза около 700 нм, вблизи
красного цвета. Они отсекают инфракрасную составляющую световых волн,
обеспечивая веб-камере правильную цветопередачу. Однако, на многие
черно-белые веб-камеры такие фильтры не устанавливают, благодаря чему
монохромные веб-камеры имеют более высокую чувствительность.
Плата видеозахвата веб-камеры (блок оцифровки) осуществляет
преобразование аналогового электрического сигнала, сформированного
ПЗС-матрицей, в цифровой формат. Процесс преобразования сигнала состоит из трех
этапов:
}
Дискретизация – считывание амплитуды электрического
сигнала через равные промежутки времени (период). Этот этап преобразования
сигнала характеризуется частотой дискретизации.
}
Квантование – это процесс представления результатов
дискретизации в цифровой форме. Изменение уровня электрического сигнала за
период дискретизации представляется в виде кодового слова из 8, 10 или 12 бит,
которые дают соответственно 256, 1024 и 4096 уровней квантования. От числа
уровней квантования зависит точность представления сигнала в цифровой форме.
}
Кодирование - помимо информации об
изменении уровня сигнала, полученной на предыдущем этапе, в процессе
кодирования формируются биты, сообщающие о конце синхроимпульса и начале нового
кадра, а также дополнительные биты защиты от ошибок.
Блок компрессии веб-камеры выполняет сжатие
оцифрованного видеосигнала в один из форматов сжатия (JPEG, MJPEG, MPEG-1/2/4,
Wavelet). Благодаря сжатию, сокращается размер видеокадра. Это необходимо
для хранения и передачи видеоизображения по сети. Если локальная сеть, к
которой подсоединена веб-камера, имеет ограниченную полосу пропускания, то во
избежание переполнения сетевого трафика целесообразно сокращать объем
передаваемой информации, снизив либо частоту передачи кадров по сети, либо
разрешение кадров. Например, каждая сетевая камера компании AXIS Communications
оснащена процессором компрессии ARTPEC, осуществляющим высокоскоростное сжатие
видеоизображения в формат JPEG/MJPEG.
Центральный процессор является вычислительным ядром
веб-камеры. Он осуществляет операции по выводу оцифрованного и сжатого
видеоизображения, а также отвечает за выполнение функций встроенного
веб-сервера и управляющей программы для веб-камер.
Интерфейс для Ethernet служит для подключения веб-камеры к сети
стандарта Ethernet 10/100 Мбит/с. Для работы в сети веб-камера может
иметь последовательный порт для подключения модема и работы в режиме dial-up
при отсутствии локальной сети. Через последовательный порт можно также
подключать к веб-камере периферийное оборудование.
Карта флэш-памяти позволяет обновлять управляющие
программы веб-камеры и хранить пользовательские HTML-страницы. ОЗУ
служит для хранения временных данных, которые генерируются при выполнении
управляющих программ и пользовательских скриптов. Многие интернет-камеры имеют
так называемый видеобуфер. Это часть ОЗУ, зарезервированная для записи и
временного хранения снятых веб-камерой видеокадров. Информация в видеобуфере
обновляется циклически, т.е. новый кадр записывается вместо самого старого. Эта
функция необходима, если веб-камера выполняет охранное видеонаблюдение,
поскольку позволяет восстанавливать события, предшествующие и следующие за
сигналом тревоги с подключенных к веб-камере охранных датчиков.
Тревожные входы/выходы служат для подключения к веб-камере
датчиков тревоги. При срабатывании одного из датчиков генерируется сигнал
тревоги, в результате чего процессор веб-камеры компонует набор кадров,
записанных в видеобуфер до, после и в момент поступления сигнала тревоги. Этот
набор кадров может отсылаться на заданный e-mail адрес или по FTP.
Постановка
задачи о выделении границ
Первой и одной из основных
задач в создании системы технического зрения для робота-шпаклевщика является
разработка приложения, которое могло бы получать изображение плиты обрабатывать
его и в итоге вычислять местоположение края плиты. В качестве примера было получено
тестовое изображение реального края плиты (рис. 3). Данный край необходимо
зафиксировать и получить его координаты, либо расстояние от границы снимка.
Выделение границ — термин в
теории обработки изображения и компьютерного зрения, частично из области поиска
и распознавания объектов на изображении, основывается на алгоритмах определения
точек цифрового изображения, в которых резко изменяется яркость или имеются
другие виды неоднородностей.
Основная цель обнаружения
резких изменений яркости изображения заключается в фиксации неоднородностей на
полученном изображении. Они могут отражать различные предположения о модели
формирования изображения, изменения в яркости изображения могут указывать на
изменения глубины; ориентации поверхностей; свойств материала и различие в
освещении наблюдаемой сцены.

Рис. 3. Изображение края
плиты
Под фильтрацией цифровых
изображений понимают операцию, имеющую своим результатом изображение того же
размера, полученное из исходного по некоторым правилам. В результате работы
фильтров интенсивность (цвет) каждого пикселя результирующего изображения
определяется как функция интенсивностей (цветов) пикселей, расположенных в
некоторой его окрестности в исходном изображении.
Правила, задающие фильтрацию
(их называют фильтрами), могут быть самыми разнообразными [10-15]. Заметим,
что, согласно предложенному определению, операция, заключающаяся в
последовательном применении двух или более фильтраций, тоже является
фильтрацией. Таким образом, можно говорить о составных фильтрах,
соответствующих комбинациям простых. Изучив основные типы фильтров в данной
лекции, мы будем иметь дело с применением фильтров, составленных из них, для
решения разнообразных задач в последующих лекциях. Фильтрация изображений
является одной из самых фундаментальных операций компьютерного зрения,
распознавания образов и обработки изображений. Фактически, с той или иной
фильтрации исходных изображений начинается работа подавляющего большинства
методов. Линейные фильтры позволяют добиться самых разнообразных эффектов.
Будем считать, что задано
исходное полутоновое изображение A, и
обозначим интенсивности его пикселей A(x,y). Линейный фильтр определяется
вещественнозначной функцией F,
заданной на растре. Данная функция называется ядром фильтра, а сама фильтрация
производится при помощи операции дискретной свертки (взвешенного суммирования):
![]()
Результатом служит
изображение B. Обычно ядро
фильтра отлично от нуля только в некоторой окрестности N -ой точки (0, 0). За
пределами этой окрестности F(i, j) или в точности равно нулю,
или очень близко к нему, так что можно им пренебречь. Суммирование производится
по (i,j),
и значение каждого пикселя B(x,y) определяется пикселями
изображения A, которые лежат в
окне N, центрированном в точке (x,y) (в дальнейшем будем обозначать
это множество N(x, y) ).
Фактически в качестве фильтра
выступает матрица (ядро), свертка изображения с которой дает новое изображение.
В качестве ядра обычно используется матрица размером 3×3, но возможно и
больше (5×5, 7×7 и т.д.). Ядро содержит степени влияния («веса»)
окружающих значений элемента на сам элемент.
Получается, что каждый элемент исходной матрицы умножается
на центральное значение матрицы ядра. Кроме этого на соответствующие значения
умножаются окружающие его, после чего результаты суммируются и принимаются как
преобразованное значение.
В двумерном случае аналогом
второй производной является скалярный оператор, называемый оператором Лапласа
(лапласиан)
 .
.
Оператор Лапласа можно
приблизить для дискретных изображений фильтром с матрицей, один из вариантов
которой имеет вид
 .
.
При применении этого
оператора на однородной поверхности значение новой точки равно 0, а границе
меньше 0 (максимум) и больше 0 (минимум). В результате применения дискретного
лапласиана большие по модулю значения соответствуют как вертикальным, так и
горизонтальным перепадам яркости. Лапласиан является, таким образом, фильтром,
находящим границы любой ориентации. Нахождение границ на изображении может
производиться путем применения этого фильтра и сохранения всех пикселей, модуль
значения которых превосходит некоторый порог. Однако такой алгоритм имеет
существенные недостатки. Главный из них - неопределенность в выборе величины
порога. Для разных частей изображения приемлемый результат обычно получается
при существенно разных пороговых значениях. Кроме того, разностные фильтры
очень чувствительны к шумам изображения.
Это дискретный
дифференциальный оператор, вычисляющий приближенное значение градиента яркости
изображения. Результатом применения оператора Собеля в каждой точке изображения
является либо вектор градиента яркости в этой точке, либо его норма. Оператор
Собеля основан на свёртке изображения небольшими целочисленными фильтрами в
вертикальном и горизонтальном направлениях, поэтому его относительно легко
вычислять. С другой стороны, используемая им аппроксимация градиента достаточно
грубая, особенно это сказывается на высокочастотных колебаниях изображения.
Математически, градиент
функции двух переменных для каждой точки изображения (которой и является
функция яркости) — двумерный вектор, компонентами которого являются производные
яркости изображения по горизонтали и вертикали. Градиент изображения f(x,y) в точке (x,y) определяется как двумерный вектор
 .
.
Вектор G
указывает направление максимального изменения функции f в точке (x,y). При
определении краев представляет интерес величина этого вектора, называемого
обычно градиентом и обозначаемого как G[f(x,y)], где
 .
.
На практике, как правило,
градиент аппроксимируется абсолютными значениями
![]() .
.
В каждой точке изображения
градиентный вектор ориентирован в направлении наибольшего увеличения яркости, а
его длина соответствует величине изменения яркости. Это означает, что
результатом оператора Собеля в точке области постоянной яркости будет нулевой
вектор, а в точке, лежащей на границе областей различной яркости — вектор,
пересекающий границу в направлении увеличения яркости.
Ядро оператора:
 .
.
Оператор Собеля сглаживает
паразитные эффекты на изображении, вызываемые чисто центрально-дифференциальным
оператором, но не обладает полной вращательной симметрией (рис. 3.). Марр
исследовал улучшение этого свойства и нашёл, что лучшие результаты даёт
следующее ядро [5]:
 .
.
Чтобы отделить перепады
яркости границ от перепадов яркости, вызванных шумами и несущественными
деталями, изображение подвергают сглаживающей гауссовской фильтрации.
Такое решение проблемы, на
первый взгляд, парадоксально - для нахождения границ мы их сначала размываем.
Данный прием основывается на том, что при сглаживающей фильтрации мелкие
несущественные детали будут размываться существенно быстрее перепадов между
областями. Ядро гауссовского фильтра:
![]() .
.
Гауссовский фильтр имеет
ненулевое ядро бесконечного размера. Однако ядро фильтра очень быстро убывает к
нулю при удалении от точки (0, 0), и потому на практике можно ограничиться
сверткой с окном небольшого размера (матрица 3×3, 5×5). Пример
матрицы:
реализующей
сглаживающий фильтр.
Алгоритм Кэнни
Алгоритм Кэнни состоит в
совмещении вышеперечисленных методов и применении гистерезисной фильтрации.
Идея гистерезисной фильтрации
заключается в том, что длинный устойчивый граничный контур, скорее всего,
содержит в себе пиксели с особенно большим перепадом яркости, и, начиная с
такого пикселя, контур можно проследить, переходя по граничным пикселям с
меньшим перепадом яркости (рис. 4).
Рис. 4. Результат работы алгоритма Кэнни
Реализация решения задачи
Для реализации решения задачи
с использованием описанных выше методов было решено написать программу на C++, которая бы обладала возможностью
захвата изображения, последующей обработки полученного изображения, выделяла
границы в изображении и находила среди них нужную.
Для ускорения процесса
создания программы были использованы возможности библиотеки машинного зрения с
открытым исходным кодом OpenCV.
Библиотека написана на C и C++ и работает под Linux, Windows и Mac OS X. OpenCV
была разработана для эффективных вычислений и с упором на приложения реального
времени. OpenCV написана на оптимизированном C и использует преимущества
многоядерных процессоров [16-19].
Главной целью OpenCV является
предоставление простой в использовании инфраструктуры компьютерного зрения,
которая помогает быстро строить достаточно сложные приложения. OpenCV содержит
более 500 функций, которые охватывают многие области, в том числе мониторинг
конвейерной продукции, медицинская визуализация, безопасность, пользовательские
интерфейсы, калибровка камер, стерео зрение и робототехника. Поскольку
компьютерное зрение и машинное обучение, часто идут рука об руку, OpenCV также
содержит комплексную библиотеку машинного обучения общего назначения Machine
Learning Library (MLL). Эта подсистема ориентирована на статистическое
распознавание образов и кластеризацию. Библиотека MLL весьма полезна для задач
машинного зрения, но при этом носит достаточно общий характер и может
использоваться для любых задач машинного обучения.
В программе выделения границы
были использованы два модуля OpenCV:
·
CV — Модуль
обработки изображений и компьютерного зрения
·
Highgui —
Модуль для ввода/вывода изображений и видео
При использовании всего двух
модулей библиотеки OpenCV
для разработчиков открывается широкий спектр возможностей по созданию сложных
приложений.
Поиск линий с помощью
преобразования Хо (Hough)
Одним из эффективных методов
обнаружения контурных объектов известной формы и оценивания их параметров является
преобразование Хо (ПХ). Классическое ПХ было разработано для обнаружения прямых
линий, а затем кривых, заданной аналитической формы (окружностей, парабол,
эллипсов и т.п.) на множестве точек двумерной плоскости. Полученное с помощью ПХ описание линий можно
использовать для многих приложений машинного зрения, таких как распознавание
формы объектов, регистрация изображений
и др. [20].
Преобразование Хо позволяет
связать сигнальную область (исходное изображение) и область параметров (рис. 5).
Этот процесс можно реализовать, если использовать массив аккумуляторов,
представляющий двумерное параметрическое пространство R2.
Алгоритм программы.
1.
Получение (захват) изображения. Пользователь может непосредственно
передать приложению уже готовое изображение, с которым необходимо работать. Или
же приложение может произвести захват изображения в реальном времени при помощи
установленной на компьютер веб-камеры. Так же поддерживается возможность
передавать приложению готовые видеозаписи, которые будут обрабатываться и
воспроизводиться практически в реальном времени.
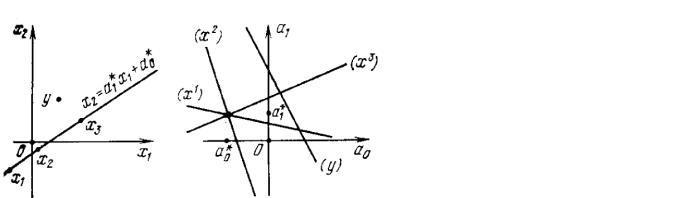
Рис. 5. Геометрическая интерпретация
взаимосвязи сигнальной и спектральной областей для прямой линии
2.
Вычисление яркости полученного
изображения
3. Применение
сглаживающего гауссовского фильтра от помех.
4. Выделение
границ в изображении при помощи алгоритма Кэнни
5. Поиск
линий в изображении при помощи алгоритма Хо.
6. Выделение
линий с заданным отклонением.
7.
В том
случае, если обнаруженных линий больше
одной, то высчитывается математическое ожидание x координаты линии и выбирается линия, которая находится наиболее
близко к нему
Блок-схема
программы
представлена на рис. 6.

Рис. 6. Блок-схема программы
Основные
функции и возможности программы
·
Использование
в качестве исходных данных цифрового видео различных форматов.
·
Использование
в качестве исходных данных видео в реальном времени, полученного с веб-камеры.
·
Возможность
регулировки параметров обработки изображения / видео.
·
Обработка
данных и отображение полученных результатов с минимальной задержкой.
·
Простой
переход между исходным изображением / видео и результатом обработки (клавиша «Enter»).
·
Отображение
расстояния от левого края кадра до границы.
·
Автоматическое
сохранение параметров программы при выходе.
Интерфейс программы позволяет
задавать некоторые параметры и режим работы программы.
·
Параметры Canny1 и Canny2. Меньшее из параметров соответствует минимальной длине
градиента, при которой пиксель может быть признан граничным. Большее,
соответствует минимальной длине градиента, при которой пиксель может
инициализировать контур.
·
Параметр Hough. Является порогом принятия какого-либо объекта в изображении
за линию.
·
Параметр Angle. Максимальное отклонение линии от вертикали.
По клавише «Enter» в поле результата исходное изображение
меняется на обработанное и наоборот. Найденная граница и расстояние до нее от
левого края отображается в обоих вариантах представления результата.
При воспроизведении видео или
захвата видео с камеры можно «заморозить» текущий кадр при помощи нажатия
клавиши «Space» («Пробел»).
Выход из программы
осуществляется по нажатию клавишы «Esc». При выходе автоматически сохраняются все настройки
параметров программы.
Режимы
работы программного комплекса
Разработанный программный
комплекс содержит в себе три основных режима работы:
1.
Исходными
данными являются потоки видеоинформации, получаемой от веб-камеры.
2.
Исходными
данными являются цифровые изображения
3.
Исходными
данными являются цифровые видеозаписи.
Первый режим работы назначен
по умолчанию. При запуске приложения, автоматически запускается режим работы с
веб-камерой и начинается обработка получаемой информации в реальном времени.
Второй режим работы
запустится автоматически, если в стандартном проводнике Windows перетащить файл с каким-либо
изображением подходящего формата на файл, запускающий приложение.
Третий режим работы
запускается аналогично второму. Необходимо в стандартном проводнике Windows перетащить файл с видеозаписью на файл,
запускающий приложение.
Комплекс лабораторной СТЗ
включает персональный компьютер (ноутбук) и веб-камеру (рис. 7).

Рис. 7. Фотография макета комплекса с
веб-камерой
Минимальные системные
требования включают:
· Windows
XP с Service Pack
2/3; Windows Vista; Windows 7;
·
Процессор
Intel Celeron 1.7 Ггц и выше, либо аналогичный AMD;
·
512Мб
оперативной памяти;
·
40Мб
пространства на жестком диске.
Вертикальная линия найдена на
расстоянии в 278 пикселей от левого края (рис. 8). Слева показано исходное
изображение с наложенной поверх найденной линией, справа – обработанное
изображение, по которому производился окончательный поиск линии. Переключение
между режимами (исходное изображение, обработанное изображение) в программе
производится клавишей Enter.
На рис. 9 показан еще один
пример работы программы. В результате обработки изображения железобетонной
плиты вертикальная линия (край плиты) найдена на расстоянии с 195 пикселей от
левого края.
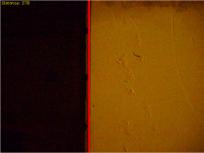
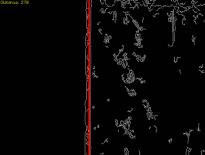
Рис. 8. Исходное изображение и результат его обработки
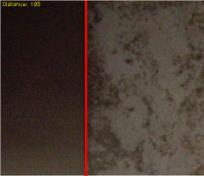
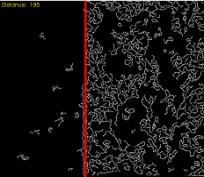
Рис. 9. Пример обработки реального изображения
Разработан автоматизированный
робототехнический комплекс с адаптивной интеллектуальной системой управления.
Для его реализации предполагается использовать веб-камеру, подключенную к
персональному компьютеру, а так же специально разработанное для решения задачи
программное обеспечение. Таким образом, робототехнический комплекс для
безотходной шпаклевки железобетонных
изделий, оснащенный СТЗ, позволяет исключить человека из производства бетонных
плит на данном этапе.
Для обеспечения высокого
качества обработки поверхности
необходимо разработать способ автоматического контроля частоты на основе
методов машинной обработки изображения обрабатываемой поверхности и анализа текстуры. Необходимо решить важную задачу
оптимизации размера (диаметра) рабочего органа: при увеличении диаметра
возрастает производительность, но при
этом увеличиваются энергозатраты и его вес (расположенного на подъемной
платформе) и габариты привода.
СПИСОК
ЛИТЕРАТУРЫ
1.
Абрамов
В.В., Петухов С.В., Васильев В.Г., Шпынев Н.А. О комплексном подходе к
автоматизации и роботизации технологических операций в производстве
железобетонных изделий. Сб. трудов БГСТУ, 2009, с. 12- 20.
2.
Шпынев Н.А.
Совершенствование процесса производства железобетонных изделий с модернизацией
шпаклевочной машины для внутренних стеновых панелей / Дипломный проект. Кафедра
«Машины и оборудование заводов строительных материалов, изделий и конструкций»
МГАКХиС, 2008, 126с.
3.
Шпынев Н.А.
Робототехнический комплекс для отделки железобетонных изделий после затвердевания
бетона. Вестник БГТУ им. В.Г. Шухова, 2010 (в печати).
4.
Абрамов
В.В., Иванюгин В.М., Петухов С.В., Шпынев Н.А. и др. Система технического
зрения мехатронного интеллектуального комплекса для отделки (шпатлевки)
стеновых панелей// Тр. Международного студенческого форума «Образование, наука,
производство», Белгород, октябрь 2010.
5.
Фу К.,
Гонсалес Р.,Ли К. Робототехника // М.:Мир, 1989, 624 с.
6.
Иванюгин
В.М., Петухов С.В. Машинное стереозрение // Зарубежная радиоэлектроника, № 7 -
9, 1993, с. 56 - 64.
7.
Петухов
С.В., Иванюгин В.М., Илюхин А.С. Использование модели сцены в человеко-машинной
стереометрической телевизионной системе с целью измерения координат
произвольной точки // Сб. науч. тр. "Искусственный интеллект в технических
системах".-М.: ГосИФТП, 2001, с.143-163.
8.
Петухов
С.В., Шаманов И.В. Методы обработки изображений в многоканальной стереосистеме
технического зрения // Динамика
неоднородных систем. Тр. ИСА РАН 2007,т.31(3), с.243 - 248.
9.
Петухов
С.В. Адаптивные стереотелевизионные системы технического зрения //
Машиностроение и инженерное образование. 2008, №3. С. 30–41. Розенфельд
А. Распознавание и обработка изображений -М.:Мир, 1972, 230 с.
10.
Прэтт
У. Цифровая обработка изображений
-М.:Мир, 1982, Кн.2, 480 с.
11.
Бакут П.А.,
Колмогоров Г.С. Сегментация изображений: методы выделения границ областей//
Зарубежная радиоэлектроника, -М.:Радио и связь, N-10,1987, С.25-47.
12.
Павлидис Т.
Алгоритмы машинной графики и обработки изображений -М.: Радио и связь, 1986,
-400 с.
13.
Р.
Гонсалес, Р. Вудс. Цифровая обработка
изображений. М.: Техносфера, 2006
14.
http://ru.wikipedia.org/
15.
Марр Д.
Информационный подход к изучению представления и обработки зрительных образов.
– М.:Радио и связь,1987, 400 с.
16.
http://www.intuit.ru/department/graphics/rastrgraph/8/
17.
http://www.intuit.ru/department/graphics/rastrgraph/9/
18.
http://docs.gimp.org/en/plug-in-convmatrix.html
19.
http://matlab.exponenta.ru/imageprocess/book2/14.php
20.
Лабунец
В.Г., Чернина С.Д. Теория и применение преобразования Хо // Зарубежная радиоэлектроника, -М.: Радио и
связь, N-10,1987,С.25-47.