Ю. В.
Ващёнок, А. С. Бобылёв, Ю. А. Гурвич
Белорусский национальный технический университет
Определение устойчивости маятника методами Ляпунова
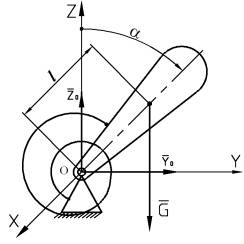
Положение
равновесия физического маятника, в котором его центр масс находится над опорой
неустойчиво. Для стабилизации этого положения между телом и опорой помещена
спиральная пружина, создающая восстанавливающий момент М, пропорциональный углу
наклона маятника α и равный М = сα, где с - жесткость пружины.
Выполним анализ устойчивости маятника методами А.М.
Ляпунова.
В соответствии с
теоремой первого метода Ляпунова если ![]() , то этот знак
положительный и корни характеристического полинома чисто мнимые этот случай
относится к критическому, т.к. вещественная часть корней равняется нулю (Re
λ1 = Re λ2
= 0).
Этот случай должен быть исследован дополнительно вторым методом Ляпунова.
, то этот знак
положительный и корни характеристического полинома чисто мнимые этот случай
относится к критическому, т.к. вещественная часть корней равняется нулю (Re
λ1 = Re λ2
= 0).
Этот случай должен быть исследован дополнительно вторым методом Ляпунова.
Второй метод Ляпунова. Рассмотрим подробнее критический случай. Для этого необходимо
ввести функцию Ляпунова ![]() , которая должна обладать рядом свойств, описанных в
литературе [1-3].
, которая должна обладать рядом свойств, описанных в
литературе [1-3].
В качестве функции
Ляпунова ![]() предлагаем ввести
определенно-положительную квадратичную форму, которую получим разложением в ряд
полной энергии
предлагаем ввести
определенно-положительную квадратичную форму, которую получим разложением в ряд
полной энергии ![]() при условии, что
при условии, что ![]() . Тогда функция
Ляпунова приобретает вид:
. Тогда функция
Ляпунова приобретает вид:
 . (1)
. (1)
Функция (1) отвечает всем условиям функции Ляпунова: является
вещественной, однозначной, непрерывной, знакоопределенной функцией, обращается
в нуль при ![]()
![]() ,
, ![]() при
при ![]() .
.
Возьмем полную
производную по времени от функции Ляпунова
![]() . (2)
. (2)
Будем
считать, что отклонения маятника от вертикального положения невелики. Тогда в
качестве уравнений возмущенного движения
используем уравнения первого приближения:![]() ,
, ![]() . Теперь
подставим в выражение полной производной по времени от функции Ляпунова (2)
значения
. Теперь
подставим в выражение полной производной по времени от функции Ляпунова (2)
значения ![]() . В итоге получим
выражение тождественно равное нулю
. В итоге получим
выражение тождественно равное нулю
![]() .
.
Если производная по времени от функции Ляпунова тождественно
равна нулю ![]() , то согласно теореме об устойчивости по второму методу Ляпунова состояние равновесия
маятника при его вертикальном положении - устойчиво. Система подпружиненного
физического маятника имеет единственное состояние равновесия при α=0
(вертикальное положение маятника) в случае
, то согласно теореме об устойчивости по второму методу Ляпунова состояние равновесия
маятника при его вертикальном положении - устойчиво. Система подпружиненного
физического маятника имеет единственное состояние равновесия при α=0
(вертикальное положение маятника) в случае ![]() , что доказано с помощью второго метода Ляпунова.
, что доказано с помощью второго метода Ляпунова.
Третий метод
Ляпунова. Если в положении абсолютного равновесия потенциальная энергия не
имеет минимума и его отсутствие определяется членами второго порядка малости
без необходимости рассмотрения членов более высокого порядка, то равновесие
неустойчиво. Теорема Ляпунова справедлива и для относительного равновесия, если
уравнение
![]() = Q +
= Q +  -
- ![]() (s=1,…,
n)
(s=1,…,
n)
Не содержит
обобщенных потенциальных и гироскопических сил. Корни x_1 … x_2 векового
уравнения:
 = 0
= 0
Где  =
=  =
=
И производные
вычисляются для положения равновесия, называются коэффициентами устойчивости, а
число отрицательных корней – степенью неустойчивости. Положение
равновесия
физического маятника, в котором его центр масс находится над опорой,
неустойчиво. Для стабилизации этого положения между телом и опорой помещена
спиральная пружина, создающая восстанавливающий момент, пропорциональный углу a
наклона маятника. Каким следует выбрать коэффициент пропорциональности, чтобы
желаемая стабилизация была достигнута.
Потенциальная энергия сил,
действующих на тело, имеет вид П (a) = mgl cos a +  с
с ![]()
Z—расстояние
между осью качания маятника O и его центром тяжести G,
с —
искомая
жёсткость пружины.
B положении равновесия П' = —mgl sin
a + ca = 0. При любых значениях
параметров уравнение равновесия имеет решение a = 0. Отвечающее этому
решению положение равновесия устойчиво, если П " (0) = —mgl
+ с >
0.