Технические
науки/3.Отраслевое машиностроение
Магістрант Стрілець Я.О.,
к.т.н. Коц І.В.
Вінницький національний технічний
університет, Україна
ДОСЛІДЖЕННЯ ГІДРОПРИВОДУ РОЗЧИНОЗМІШУВАЧА
При змішуванні різних будівельних сумішей, зокрема, під
час виготовлення штукатурних розчинів, виникає цілий ряд складнощів, що
пов’язані з забезпеченням стабільності і стійкості роботи при різних швидкостях
обертання та змінного навантаження на лопатки змішувача зі сторони оброблюваного
середовища.
На сьогоднішній день відомо багато різноманітних
приводів змішувальних пристроїв. Найпоширенішими є електричні асинхронні приводи.
Незважаючи на відносно невисоку вартість цих приводів і енергетичні показники,
їх широке застосування для приводу змішувачів має певні обмеження внаслідок
відсутності можливості зміни частоти обертання, що вимагає спеціальних
високовартісних пристосувань типу частотних перетворювачів. Окрім того,
суттєвим недоліком таких електроприводів є значні перевантаження їх обмоток при
пускових режимах на початку змішування, коли в’язкість розчину є досить
значною. Аналіз відомих досліджень свідчить, що найбільш перспективними серед
них є гідравлічні приводи, які отримали розповсюдження завдяки своїм перевагам.
Це, насамперед, малі габарити і висока питома потужність, що приходиться на
одиницю ваги приводу, підвищена надійність, простота конструктивного виконання,
можливість зміни частоти обертання в процесі роботи, а також можливість задовольнити
динамічні характеристики в перехідних режимах (пуск, зупинка, прискорення,
гальмування). Серед гідроприводів найбільшого розповсюдження набули приводи з
об’ємним і дросельним регулюванням.
Основною задачею даної роботи є
дослідження параметрів і характеристик гідроприводу розчинозмішувача, при яких може
бути забезпечена стійкість і стабільність цього приводу для різних навантажень.
На характеристики роботи і стійкість подібного гідроприводу можуть суттєво
впливати гідравлічні і механічні параметри робочих виконавчих органів і систем
керування гідроприводом, зокрема, в потужних гідроприводах з великими витратами
робочого розчину [1, 2, 5].
На рисунку показана схема розчинозмішувача з приводом
від шестеренних гідромоторів.
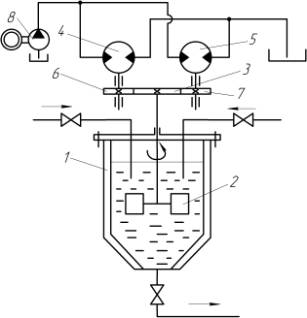
Cхема розчинозмішувача
з приводом від шестеренних гідромоторів
Розчинозмішувач для
приготування будівельних сумішей з гідравлічним приводом складається з корпусу
1, лопатевого змішувача 2, обертання якого здійснюється за допомогою
центральної шестерні 3, що приводиться в дію гідромоторами 4 і 5 з приводними
шестернями 6 і 7. Установка працює так: при
подачі робочої рідини під тиском від гідронасоса 8 в робочі камери гідромоторів
4 і 5 при наборі певної початкової величини тиску починається обертання їх
вихідних валів, які, за допомогою приводних шестерень 6 і 7, приводять в обертання
центральну шестерню 3, жорстко закріплену на основній осі змішувального
пристрою, що надає йому обертального руху і приводить до перемішування
компонентів будівельної суміші. Робоча рідина, що втратила енергію, надходить у
вихідні отвори гідромоторів 4 і 5 і подається
на злив.
Розглянемо математичну модель робочого процесу гідроприводу
запропонованої конструкції розчинозмішувача, призначеного для приготування
штукатурного розчину. При складанні диференціальних рівнянь робочого процесу
використовуються наступні припущення: зв'язок вихідного валу гідромотора з
інерційним навантаженням і в проміжних ланках змішувального пристрою вважається
абсолютно жорстким; температура робочої рідини постійна; витоки в гідросистемі
прямо пропорційні тиску; у зв'язку з незначною довжиною трубопроводів не
враховуються гідравлічні втрати в них і хвильові процеси; тиск на зливі
постійний рзл =
0,2 … 0,3 МПа.
Рівняння обертання центрального
зубчатого колеса 3, що має корисне навантаження, можна представити у вигляді [1, 3]:
 , (1)
, (1)
де І – момент інерції частин гідромоторів, що обертаються; Ін – момент інерції
навантаження, що приведений до вихідного валу, механічно зв’язаного із
гідромоторами; Мн – крутний
момент корисного навантаження, яке приведене до вихідного валу, що механічно
зв’язаний із гідромоторами; Мн (0)
– складова крутного моменту тертя при нульовому корисному навантаженні
гідромоторів; М (ω) і М (p) – відповідно складові крутних моментів гідромоторів, що
залежать від числа обертів і тиску, що прийняті в даному випадку постійними; ![]() –
різниця тисків на вході і виході з гідромотора; q – робочий об’єм гідромотора [1, 4, 5].
–
різниця тисків на вході і виході з гідромотора; q – робочий об’єм гідромотора [1, 4, 5].
 , (2)
, (2)
де Мн (0)ст – втрати крутного моменту, що
залежать від статичного тертя; ψ – коефіцієнт
нерівномірності витрати; t – час з початку обертання центрального зубчатого
колеса 3; φ – кут повороту
вихідного валу, що механічно зв’язаний із гідромоторами; Qн –
теоретична продуктивність приводного гідронасоса 8; ηон, ηом – відповідно, об’ємні ККД гідронасоса і
гідромотора; Епр – приведений модуль пружності робочої
рідини; W – загальний
об’єм рідини, що знаходиться під тиском на ділянці гідропривода, що
розглядається.
Після ряду перетворень рівняння
(1) можна записати
 , (3)
, (3)
 , (4)
, (4)
 , (5)
, (5)
 , (6)
, (6)
 . (7)
. (7)
Для шестеренних гідромашин ![]() , тому корені характеристичного рівняння є
комплексно-спряженими і розв’язок диференціального рівняння (3) можна
представити у вигляді:
, тому корені характеристичного рівняння є
комплексно-спряженими і розв’язок диференціального рівняння (3) можна
представити у вигляді:
![]() , (8)
, (8)
де  , (9)
, (9)
 , (10)
, (10)
![]() , (11)
, (11)
 . (12)
. (12)
Диференціюючи рівняння (8), після
ряду математичних перетворень, отримаємо кутову швидкість приводного вала
гідромотора:
![]() . (13)
. (13)
Вираз (12) є рівнянням для
знаходження кутової швидкості обертання гідромотора ωвст , що встановилась за період часу t.
Вираз (13) свідчить про те, що
при досягненні рівності ![]() , ω(t) = ωвст , тобто, перехідний процес при цьому
завершується.
, ω(t) = ωвст , тобто, перехідний процес при цьому
завершується.
Оскільки ![]() , то
, то
![]() . (14)
. (14)
Поділивши праву і ліву частини
рівняння (14) на cos βt,
отримаємо тригонометричне рівняння виду
 . (15)
. (15)
![]() , (16)
, (16)
де k – ціле число; δ – головний розв’язок рівняння
(15).
Виходячи з виразу (16),
знаходимо тривалість перехідного процесу
![]() . (17)
. (17)
Очевидно, що чим менша величина
β, тим більша тривалість
перехідного процесу, це визначається впливом на величину β сталих коефіцієнтів, що входять до залежності (11).
Висновки
Підвищення моменту інерції
рухомих мас (І+Ін) зменшує
коефіцієнт β і, відповідно,
збільшує тривалість t
перехідного процесу. Зі збільшенням робочого об’єму гідромотора q, підвищується
величина β і зменшується
тривалість t. Чим більша
величина q, тим
більша величина крутного моменту М і
тим швидше стабілізується стійка робота гідроприводу.
Дослідження складеної
математичної моделі робочого процесу гідроприводу розчинозмішувача, призначеного
для приготування штукатурного розчину, дозволить якісніше визначити
конструктивні параметри і режими роботи приводних пристроїв, що надає
можливість покращити їх динамічні характеристики і вибрати оптимальні режими роботи.
Наявність запропонованого гідроприводу розчинозмішувача також сприяє плавній
зміні частоти обертання робочих органів у відповідності з фізичним станом
перемішуваного середовища.
Література:
1. Навроцкий К. Л. Теория и проектирование гидро- и пневмопривода: Учебник.
- М.: Машиностроение, 1991. – 384 с.
2. Гідроприводи та гідропневмоавтоматика: Підручник / В. О. Федорець, М.
Н. Педченко, В. Б. Струтинський та ін. За ред. В.О. Федорця. - К.: Вища шк.
1995. – 463 с.
3. Праздников А. В.
Гидропривод в металлургии. – М.: Металлургия, 1973. – 335 с.
4. Сахно Ю. А. Форсированый разгон гидродвигателя /
Гидропривод и гидропневмоавтоматика: Респ. межвед. науч.-техн. сб., 1982. –
вып. 18. – С. 85–88.
5. Гамынин Н. С., Карев В. И., Селиванов А. М. Гидравлические приводы летательных
аппаратов. – М.: Машиностроение, 1992. – 368 с.
6. Newhall D. H., Zilberstein
V. A., Ogawa I. Effect
of the fluid viscosity
http://users.rcn.com/harwood.ma.ultranet/ articles.html.