Д.т.н. Драгунов Г.Д., Юсупов А.А.
Южно-Уральский государственный
университет
ЭКСПЕРИМЕНТАЛЬНАЯ
ОЦЕНКА АДЕКВАТНОСТИ МЕТОДИКИ ТЯГОВО-ДИНАМИЧЕСКОГО РАСЧЕТА, УСОВЕРШЕНСТВОВАННОЙ УЧЕТОМ
УПРАВЛЕНИЯ ДВИГАТЕЛЕМ И ТРАНСМИССИЕЙ
На
начальном этапе проектирования для оценки тягово-скоростных свойств автомобиля выполняют
тягово-динамический расчет [1]. Его целью является определение характеристик
двигателя и трансмиссии, обеспечивающих требуемые тягово-скоростные свойства и
топливную экономичность автомобиля в заданных условиях эксплуатации. Однако
существующие методики тягово-динамического расчета определяют показатели
тягово-скоростных свойств для режимов управления автомобилем практически неиспользуемых
в реальных условиях эксплуатации: работа двигателя только по внешней скоростной
характеристике, мгновенное переключение передач только при достижении
максимальной скорости вращения коленчатого вала, разгон автомобиля без учета
времени переключения передач.
Наиболее
полное представление о тягово-динамических свойствах дает анализ зависимости
скорости автомобиля от времени под влиянием различных факторов, в том числе и
управляющего воздействия водителя. Как правило, такие зависимости
устанавливаются в ходе дорожных испытаний. На стадии проектирования, когда нет
объекта испытаний, целесообразно использовать аналитическую зависимость
скорости от времени. Используемые в тягово-динамическом расчете методы
определения времени разгона в заданном диапазоне скоростей, обладают, по
крайней мере, одним существенным недостатком – не учитывают управляющее
воздействие на режим работы двигателя и автомобиля. Существующие методы расчета
либо не учитывают роль управления вообще, рассматривая работу двигателя только
по внешней скоростной характеристике, либо учитывают упрощенно, рассматривая
разгон автомобиля с постоянным положением управляющего органа (педали подачи топлива) на каждой передаче. Однако,
в реальных условиях эксплуатации водитель, активно воздействуя на управляющий орган,
существенно влияет на скорость движения автомобиля. Таким образом, возникает
задача нахождения аналитической зависимости скорости автомобиля от времени без
проведения испытаний, используя известные исходные данные и с учетом
управляющего воздействия на орган управления подачей топлива.
Учтем в тягово-динамическом
расчете зависимость эффективного крутящего момента двигателя Ме от скорости вращения
коленчатого вала ω и положения
органа управления подачей топлива h [2]. Тогда при разгоне на каждой передаче зависимость скорости автомобиля v от времени t можно определить из
следующей системы уравнений:
 , (1)
, (1)
где Ммах
– максимальный крутящий момент двигателя; ωМ
– угловая скорость коленчатого вала двигателя, соответствующая максимальному
крутящему моменту; Nмах – максимальная мощность двигателя; ωN – угловая скорость коленчатого вала двигателя,
соответствующая максимальной мощности; ωmin – минимальная устойчивая скорость вращения
коленчатого вала двигателя на холостом ходу; Gа – вес автомобиля; rд – динамический радиус колеса; kF –фактор обтекаемости;
f0 – коэффициент
сопротивления качению; iтрi – передаточное число для каждой передачи; ηтр – коэффициент полезного действия трансмиссии; δ – коэффициент учета вращающихся
масс для каждой передачи; h=f(t) – закон изменения водителем
положения органа управления подачей топлива для каждой передачи.
В процессе
переключения передач, когда силовой поток от двигателя к ведущим колесам
разорван, система (1) имеет решение:
 , (2)
, (2)
где С1 –
определяется из начальных условий движения.
Применение в тягово-динамическом расчете автомобиля системы уравнений (1)
позволяет решить три основные задачи:
-определить минимальное время разгона автомобиля в заданном диапазоне
скоростей при свободном (т.е. обеспечивающем наибольшую эффективность разгона)
режиме управления автомобилем;
- оценить тягово-скоростные свойства автомобиля при заданном режиме
управления, характерном для реальных условий эксплуатации;
- определить режимы управления двигателем и трансмиссией,
обеспечивающие движение автомобиля по заданному ездовому циклу.
Для проверки
адекватности усовершенствованной методики тягово-динамического расчета были
проведены лабораторно-дорожные испытания с использованием ходовой лаборатории
на базе легкового автомобиля УАЗ-31512 оснащенного бензиновым двигателем и
механической ступенчатой коробкой передач. Разработана методика экспериментального исследования,
позволяющая определить изменение скорости движения автомобиля во времени при
изменении передаточного отношения трансмиссии при переключении передач и
положения органа управления (педали) подачей топлива. Установлен на автомобиль измерительный комплекс регистрирующий изменение во
времени следующих параметров: скорость движения автомобиля, положение педали
подачи топлива, передаточное отношение трансмиссии.
Скорость движения
автомобиля определялась по известной зависимости от скорости вращения колеса.
Скорость вращения колеса измерялась с помощью тахогенератора, в качестве
которого использовался коллекторный двигатель постоянного тока ДПМ–25–Н1.
Для оценки передаточного
отношения трансмиссии, времени переключения передач и фиксации моментов
включения и выключения передач, также использовались тахогенераторы ДПМ–25–Н1 и
ДПФ-42-Ф1, установленные на коленчатом валу двигателя и промежуточном валу
коробки передач соответственно.
Таким образом, в ходе
испытаний записывались или могли быть посчитаны через известные передаточные
отношения скорости вращения всех валов трансмиссии на всех режимах движения
автомобиля, в том числе и в процессе переключения передач, когда передача
вращающего движения от коленчатого вала к ведущим колесам прерывается дважды –
при выключении сцепления и при выключении передачи в коробке передач. Поскольку
конструкцией автомобиля не предусмотрено переключение передач в раздаточной
коробке во время движения автомобиля, то передаточное отношение на участке
трансмиссии от промежуточного вала коробки передач до полуосей принято
постоянным. Сравнение одновременного изменения этих трех скоростей вращения во
времени позволяет определить смену режимов движения автомобиля во время испытаний.
Чтобы
проконтролировать скоростные характеристики двигателя и оценить динамические
нагрузки и время переключения передач, в промежуток разрыва передачи
вращательного движения, при выключенном сцеплении, измерялось и фиксировалось
изменение во времени крутящего момента на полуоси, а также скоростей вращения
всех валов.
Положение
педали подачи топлива измерялось
потенциометром, установленным на оси поворота дроссельной заслонки.
Таким
образом, в состав измерительного комплекса включены:
1)
Датчики скорости вращения (тахогенераторы), установленные на коленчатом валу
двигателя (ДПМ–25–Н1), промежуточном валу коробки передач (ДПФ-42-Ф1) и ведущем
колесе автомобиля (ДПМ–25–Н1).
2)
Датчик положения дроссельной заслонки (потенциометр).
3)Тензорезисторы
4)
Измерительный преобразователь ИПТ-1
5) Аналогово-цифровой
преобразователь LA-50USB.
6)
Коммутационная плата ЛА-ТК50А.
7)
ПЭВМ (ноутбук).
Структурная схема
взаимодействия составных частей измерительного комплекса представлена на рис.
1.
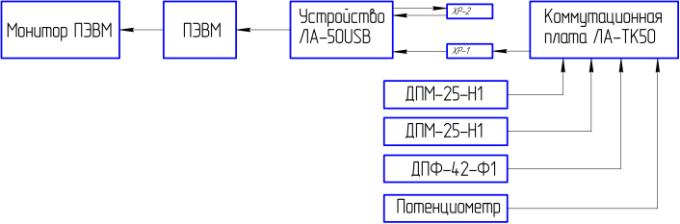
Рис. 1. Структурная
схема взаимодействия составных частей измерительного комплекса
Испытания
проводились на горизонтальном участке дороги с асфальтовым покрытием при
движении по прямолинейной траектории.
Некоторые результаты
испытаний представлены на рис. 2 и 3. Также для эффективной и быстрой обработки
результатов испытаний была произведена их запись в качестве таблицы в формате
текстового файла.
График изменения
положения педали подачи топлива (рис.2) представлен в виде отрезков прямых
линий и записан в виде функции от времени. По уравнениям (1) и (2) произведен
расчет скорости автомобиля для этой функции. Результаты расчета совмещены с
результатами измерения скорости автомобиля на рис. 3 и записаны в таблицу.

Рис. 2. Изменение
положения педали подачи топлива
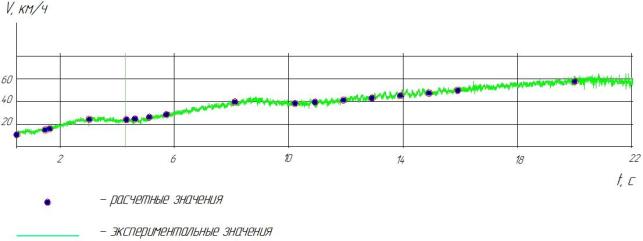
Рис.3. Изменение
скорости автомобиля
Как видно из таблицы, максимальная разница расчетной и экспериментальной
скоростей составила 1,8 км/ч (выделено) или 6,5%, что свидетельствует о
достаточной адекватности разработанной математической модели.
Сравнение расчетной и
экспериментальной скоростей автомобиля
|
Время, с |
Положение педали подачи топлива |
Расчетная скорость, км/ч |
Экспериментальная скорость, км/ч |
|
0 |
0,6 |
11,9 |
12,4 |
|
1,3 |
0,6 |
16,5 |
16,0 |
|
1,5 |
1,0 |
17,4 |
18,5 |
|
3,0 |
1,0 |
26,1 |
25,4 |
|
4,3 |
0,52 |
25,8 |
24,4 |
|
4,6 |
0,67 |
26,5 |
24,9 |
|
5,1 |
0,67 |
27,9 |
26,1 |
|
5,7 |
1,0 |
30,5 |
30,0 |
|
8,1 |
1,0 |
41,8 |
40,1 |
|
10,2 |
0,52 |
40,6 |
41,1 |
|
10,9 |
0,66 |
41,5 |
41,1 |
|
11,9 |
0,86 |
43,4 |
44,0 |
|
12,9 |
0,86 |
45,4 |
46,2 |
|
13,9 |
0,86 |
47,6 |
48,4 |
|
14,9 |
0,86 |
49,8 |
50,1 |
|
15,9 |
0,86 |
52,2 |
52,6 |
|
20 |
0,86 |
60,5 |
61,6 |
Выводы:
1)
Система уравнений (1) и выражение (2)
позволяют аналитически определить зависимость скорости движения автомобиля от
времени и от управляющего воздействия водителя. Задавая закон изменения
водителем положения органа управления подачей топлива и режимы переключения
передач можно смоделировать стиль управления автомобилем, характерный для
конкретных режимов движения.
2)
Полученные зависимости могут быть использованы в тягово-динамическом расчете и
позволяют получить представление о тягово-скоростных свойствах автомобиля в
условиях эксплуатации характерных для конкретной модели.
3)
Возможность задавать при расчете режимы управления, соответствующие будущим
условиям эксплуатации, позволяет еще на начальном этапе проектирования в условиях
ограниченной информации об автомобиле правильно выбрать исходные параметры
двигателя и трансмиссии.
ЛИТЕРАТУРА
1.
Гришкевич А.И. Автомобили: Теория:
Учебник для вузов.– Мн.: Выш. шк., 1986.– 208 с.
2. Драгунов
Г.Д., Мурог И.А., Юсупов А.А. Математическое
представление скоростных характеристик автомобильных двигателей // Двигателестроение. – 2010. — № 1.