аспирант, Андросов Н.Н.
Международный институт компьютерных технологий, Россия
ИССЛЕДОВАНИЕ
БЕСКОНТАКТНЫХ ДВИГАТЕЛЕЙ С ПОСТОЯННЫМИ МАГНИТАМИ И РАСЩЕПЛЕННЫМИ ПОЛЮСАМИ НА
РОТОРЕ
К качественно новым
требованиям, предъявляемым к функциональным характеристикам приводной техники,
в первую очередь следует отнести широкий диапазон регулирования и равномерность
скорости вращения, необходимые для реализации прецизионных технологий, а также
высокие удельные энергетические показатели и надежность работы. В данной статье
авторами предлагается выполнять полюсы ротора БДПМ (бесконтактного двигателя с
постоянными магнитами) расщепленными в тангенциальном направлении, то есть
каждый из полюсов изготовить из нескольких постоянных магнитов, намагниченных в
радиальном направлении и распределенных по окружности. Это должно значительно
уменьшить значения реактивных моментов, более равномерно распределить основной
магнитный поток машины и, в конечном счете, улучшить характеристики БДПМ.
Высокоиспользуемые
бесконтактные двигатели (БД) с возбуждением от высококоэрцитивных
редкоземельных постоянных магнитов (ПМ) могут быть интегрированы в конструкцию
узлов и отдельных деталей информационной и измерительной аппаратуры различного
агрегатного исполнения. Главным препятствием создания и внедрения
высокоиспользуемых бесконтактных двигателей с постоянными магнитами (БДПМ)
являются аналитическая и технологическая недостаточности в возможностях их
анализа и синтеза. Из-за этого электромагнитные, электромеханические и тепловые
процессы в них представляются чисто качественной картиной, затрудняющей
сравнительный анализ возможных вариантов их конструктивной реализации. Вместе с
тем сложное нелинейное математическое описание высокоиспользуемых
микроэлектромеханических устройств требует точных методик расчёта.
На рисунке 1 показана
электромагнитная схема трехфазного БДПМ с явно выраженными радиально
намагниченными расщепленными полюсами[1].
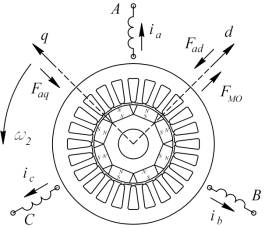 Положим, что ротор
вращается против часовой стрелки, тогда в системе координат, связанной с
полюсами, трехфазная обмотка статора вращается по часовой стрелке.
Положим, что ротор
вращается против часовой стрелки, тогда в системе координат, связанной с
полюсами, трехфазная обмотка статора вращается по часовой стрелке.
Рисунок 1 – Электромагнитная схема БДПМ с
расщепленными полюсами
Ее можно привести к двухфазной обмотке, ось одной фазы
которой совпадает с осью полюса - назовем ее продольной, а другую,
перпендикулярную ей, – поперечной. Постоянные магниты могут быть заменены
эквивалентной фиктивной обмоткой возбуждения, в которой отсутствуют потери,
запитанной от источника тока. Обмотки статора обозначим индексами d, q; обмотки ротора – D, Q.
В работе авторами были получены следующие выражения.
![]() , (1)
, (1)
где ![]() – матрица напряжений модели;
– матрица напряжений модели;
![]() – матрица активных сопротивлений;
– матрица активных сопротивлений;
![]() – матрица токов;
– матрица токов;
![]() – оператор
дифференцирования.
– оператор
дифференцирования.
![]() =
= ![]()
 – матрица потокосцеплений;
– матрица потокосцеплений;
![]() =
= ![]()
 – матрица индукции;
– матрица индукции;
![]() =
=![]()
![]() - матрица
коэффициента несинусоидальности,
- матрица
коэффициента несинусоидальности,
где
![]() =
= ![]() ;
; ![]() =
= ![]() ,
,
где bm п – ширина элемента расщепленного полюса;
kп – число элементов расщеплённого полюса;
τ – полюсное деление.
Уравнение (1) является
аналогом широко известного уравнения ЭДС для контура, движущегося в переменном
внешнем магнитном поле[2]. Умножая обе части уравнения (1) на транспонированную
матрицу тока ![]() , получим выражение для мощности:
, получим выражение для мощности:
![]() . (2)
. (2)
Последний член уравнения
(2) представляет собой механическую мощность машины Рм, зависящую от угловой скорости ротора.
Электромагнитный момент, приложенный к ротору БДПМ на основании (2)
определяется следующим выражением:
![]() . (3)
. (3)
Выражения (1), (3)
представляют собой систему уравнений, связывающих все параметры БДПМ, и
позволяют выполнить расчет как установившихся, так и переходных режимов работы.
При моделировании БДПМ
магнитное поле рассматривалось в некоторый фиксированный момент времени.
Геометрия создавалась средствами КОМПАС, а затем импортировалась в ANSYS с использованием
формата IGES. Это оказалось удобнее, чем использование собственных геометрических средств
ANSYS. Рассматривался ряд конструкций
с разным числом полюсов на роторе и с разным соотношением геометрических
размеров полюсов[3].
На рисунках 2-5 представлены картины магнитного поля в некоторый фиксированный
момент времени в виде силовых векторных линий при максимальной нагрузке. Кроме
того, была произведена оценка величины реактивного момента для разного числа
полюсов данной геометрии.
Рисунок
5 – Картина магнитного поля в виде
силовых линий (2p=2,
высота элементарного полюса уменьшена на 1 мм) Рисунок 4 –
Картина магнитного поля в виде силовых линий (2p=8)

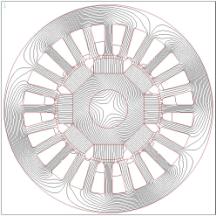


С
целью получения ответа на этот вопрос были произведены расчеты для варианта,
когда высота элементарного полюса на 1 мм меньше и составляет 3 мм. При этом
значение ![]() =0,84. Для случая 2p=2 на рисунке 5 приведена
картина магнитного поля в виде силовых линий.
=0,84. Для случая 2p=2 на рисунке 5 приведена
картина магнитного поля в виде силовых линий.
По результатам
численного анализа был сделан ряд следующих выводов:
1 С целью уменьшения
потерь в стали магнитопровода статора в
БДПМ с расщепленными полюсами следует использовать наименьшее число полюсов, то есть два.
2 В двухполюсной
конструкции БДПМ с расщепленными полюсами оказывается наибольшим максимальный
момент, развиваемый ротором.
3 Применение
двухполюсной конструкции ротора с расщепленными полюсами позволяет свести на
нет реактивный момент машины.
4 Для БДПМ с
расщепленными полюсами существует оптимальное значение высоты элементарных
магнитов.
5 Использование ротора с
расщепленными полюсами позволяет получить оптимальное соотношение величины
полюсного деления ![]() и числа зубцов статора z на
и числа зубцов статора z на ![]() , то есть оптимальное значение коэффициента полюсного перекрытия
, то есть оптимальное значение коэффициента полюсного перекрытия ![]() . Это, в свою очередь, позволяет получить больший, чем в классической конструкции,
момент, развиваемый ротором.
. Это, в свою очередь, позволяет получить больший, чем в классической конструкции,
момент, развиваемый ротором.
В ходе
испытаний опытного образца БДПМ были
проведены следующие эксперименты:
1
Определение реактивных составляющих момента.
2
Измерение ЭДС в генераторном режиме работы.
3 Исследование зависимости электромагнитного
момента от тока: M=f(I).
4 Оценка потерь в
БДПМ при изменении нагрузки: P=f(I).
5 Характеристики в
режиме тормоза: I=f(U) при n=0.
6 Измерение температуры
корпуса.
7 Измерение постоянных
времени Тм и Тэ.
Результаты, полученные в
ходе проведенных экспериментальных исследований, позволили сформулировать
следующие основные выводы:
1. Полученные
экспериментально значения реактивного момента свидетельствуют об эффективности
использования конструкции ротора с расщепленными полюсами.
2. Уменьшение полюсности
БДПМ позволяет существенно повысить их энергетические показатели, поскольку
магнитная цепь высокоиспользуемых машин насыщена, а потери в стали зависят от
частоты перемагничивания.
3. Численный метод
расчета двигателей с ротором из постоянных магнитов дает наименьшее расхождение
с экспериментом.
Литература:
1. Андросов, Н.Н.
Математическая модель бесконтактного двигателя с постоянными магнитами,
учитывающая использование конструкции магнитной системы с расщепленными
полюсами на роторе / Н.Н. Андросов // Вестник Воронежского государственного технического
университета. – 2012. – Т. 8 – № 9. – С. 98-101.
2. Низовой, А. Н. Численный анализ электромагнитных процессов в
бесконтактном двигателе с расщепленными в тангенциальном направлении полюсами /
А. Н. Низовой, С. Ю. Кобзистый, Н. Н.
Андросов // Электротехнические комплексы и системы управления. – 2010. – № 2. –
С. 13-17.
3. Анненков, А. Н.
Оценка влияния числа пар полюсов бесконтактного двигателя с постоянными магнитами
на его энергетические показатели с использованием численного расчета
электромагнитного поля / А. Н.
Анненков, Н. Н. Андросов, С. Ю. Кобзистый // Информационные
технологии в связи, вычислительной технике и энергетике: сборник трудов
международной научной конференции, 20-22 мая 2010 г. В 3 ч. Ч. 3. – Воронеж:
Междунар.
Ин-т компьют.
технологий, 2010. – С. 108-115.