Пазуха С.В., Червинский В.В.
Донецкий национальный технический университет, Украина
Система управления качеством воды
ванн плавательных бассейнов на основе многомерного ПИ-регулятора
Для
нормальной эксплуатации плавательных бассейнов необходим производственный
контроль за их состоянием, одним из пунктов которого является поддержание на
заданном уровне таких показателей, как температура и рециркуляция воды, а также
бактериологические и паразитологические показатели, которые в общем определяют
качество воды.
В
работе [1] проведен анализ ванны плавательного бассейна как объекта управления,
построена математическая модель физических процессов, протекающих в ванне с
целью построения системы автоматического управления показателями качества воды.
Проведено
ранжирование переменных, которые разделены на управляемые (выходы), управляющие
(входы) и возмущающие (возмущения). Рассматриваемый объект характеризуется следующими
параметрами:
![]() – температура горячей воды на входе в бассейн, °С;
– температура горячей воды на входе в бассейн, °С;
![]() – температура холодной воды на входе в
бассейн, °С;
– температура холодной воды на входе в
бассейн, °С;
![]() – расход горячей воды, м3/мин;
– расход горячей воды, м3/мин;
![]() – расход холодной воды, м3/мин;
– расход холодной воды, м3/мин;
![]() – расход
дезинфектанта, м3/мин;
– расход
дезинфектанта, м3/мин;
![]() – температура смешанной воды, °С;
– температура смешанной воды, °С;
![]() – концентрация дезинфектанта, кг/ м3;
– концентрация дезинфектанта, кг/ м3;
![]() – суммарный
расход воды, м3/мин.
– суммарный
расход воды, м3/мин.
На рис. 1 представлена схема ранжирования входных и
выходных переменных процесса регулирования очистки, поддержания температурного
режима и общего расхода воды в ваннах спортивных бассейнов. Как видно из рис.
1, объект является многосвязным и многомерным. Поэтому для построения САУ
опишем исследуемый объект в пространстве состояний.
Рисунок 1 – Схема
ранжирования переменных процесса
Представим разработанную в [1]
линеаризованную модель объекта в виде системы дифференциальных уравнений вида
[2]:
![]() (2)
(2)
где ![]() n – мерный вектор состояния;
n – мерный вектор состояния;
![]() l – мерный вектор выходных (регулируемых)
переменных;
l – мерный вектор выходных (регулируемых)
переменных;
![]() m – мерный вектор управляющих воздействий;
m – мерный вектор управляющих воздействий;
![]() матрица, определяющая
динамические свойства объекта управления;
матрица, определяющая
динамические свойства объекта управления;
![]() матрица входа управляющих воздействий;
матрица входа управляющих воздействий;
![]() матрица выхода;
матрица выхода;
![]() нулевая матрица.
нулевая матрица.
Для исследуемого объекта матрицы ![]() примут вид:
примут вид:
 ;
;
 ;
;  .
.
Данный объект управления является объектом управления
с полной информацией, т.е. объектом, у которого все переменные вектора
состояния доступны для измерения.
Синтез многомерного ПИ-регулятора [3].
САУ качеством воды ванн плавательных
бассейнов с многомерным ПИ – регулятором приведена на рис. 2.
Рисунок 2 – САУ качеством воды ванн
плавательных бассейнов с многомерным ПИ – регулятором
Синтез ПИ – регулятора справедлив при
следующих допущениях:
1)объект управления устойчив, что
подтверждается результатами исследования [1];
2)требования к качеству замкнутой системы в
основном сводится к ее устойчивости и точности в установившемся режиме при
обработке управляющих или возмущающих воздействий типа 1(t);
3)объект управления допускает проведение над
ним экспериментов (он реально существует и может управляться оператором).
Пусть объект управления описывается
уравнениями (1) и (2), а регулятор:
Задача сводится к определению матриц ![]() .
.
Если замкнутая ДС, состоящая из
асимптотически устойчивых ОУ и И – регулятора, асимптотически устойчива, то
справедливо условие: ![]() где
где ![]() матрица статического усиления ОУ.
матрица статического усиления ОУ.
Условие существования И – регулятора: ![]()
Если матрица регулятора представляется в виде
![]() то существует только тогда интервал для
настроечного коэффициента
то существует только тогда интервал для
настроечного коэффициента ![]() (
(![]() ), для которого система асимптотически устойчива, если
матрица
), для которого система асимптотически устойчива, если
матрица ![]() удовлетворяет условию
удовлетворяет условию
![]()
Следовательно ![]()
Выбор и настройка П – регулятора:
При маленьком значении ![]() замыкают систему и, постепенно увеличивая
замыкают систему и, постепенно увеличивая ![]() , добиваются лучшего в некотором смысле переходного процесса.
, добиваются лучшего в некотором смысле переходного процесса.
При помощи программного пакета Matlab проверено выполнение условий для применения
и настройки ПИ – регулятора для исследуемого ОУ.
Так как исследуемый ОУ отвечает всем вышеуказанным
условиям, проведем синтез многомерного ПИ – регулятора для исследуемой системы
поддержания температуры воды, качества воды и общего расхода воды на заданном
уровне, используя пакет Simulink
(рис. 3).
Проведено исследование влияния коэффициента b на характеристики переходного процесса
(время регулирования). Так как при значении коэффициента b=3900 время переходного процесса минимально,
выберем его для проектирования многомерного ПИ – регулятора.
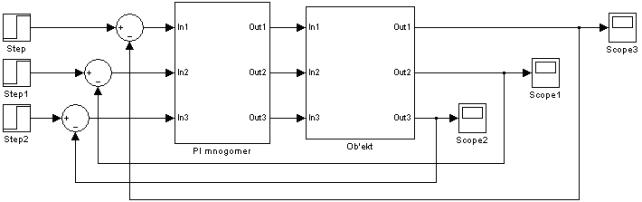
Рисунок 3 – Укрупненная схема моделирования
САУ с многомерным ПИ – регулятором в терминах пакета Simulink
На рис. 4 представлены графики переходных
процессов в системе с многомерным ПИ – регулятором.
Выводы. Сравнивая полученные переходные
процессы для системы с многомерным ПИ – регулятором с переходными процессами
нелинейной системы [1], можно сделать вывод, что
система с многомерным ПИ – регулятором имеет лучшее быстродействие и точность.
Следовательно, введение в контур системы такого регулятора является
целесообразным.
Литература:
1.
Червинский В.В., Пазуха С.В.
Математическая модель процессов теплообмена и дезинфекции воды в ваннах бассейнов
/ Наукові
праці Донецького національного технічного університету. Серія: «Обчислювальна
техніка та автоматизація». Випуск 20 (182). – Донецьк, ДонНТУ, 2011. с. 74-81.
2.
Дорф
Р, Бишоп Р. Пер. с англ. Копылова Б.И. Современные системы управления. – М.: Лаборатория
Базовых Знаний, 2002. – 832 с.
3.
Пупков
К.А., Егупов Н.Д. Методы классической и современной теории автоматического
управления. Т. 3. Синтез регуляторов систем автоматического управления. – М.: Издательство
МГТУ им. Н.Э. Баумана, 2004. – 616 с.