Педагогические науки/2. Проблемы
подготовки специалистов
К. ф.-м.
н. Гаджиев Т.С.
Дагестанский
государственный педагогический университет, Россия
О СИСТЕМЕ ДЛЯ ИЗУЧЕНИЯ
ПРОЦЕДУР РАСПОЗНАВАНИЯ
Теория распознавания образов – раздел
информатики, развивающий теоретические основы и методы классификации и
идентификации объектов, характеризующихся конечным набором некоторых свойств и
признаков.
Распознавание образов – одна из самых
распространенных задач, которую человеку приходится решать как в жизни, так и в
практической деятельности.
Процесс распознавания представляет собой
преобразование входной информации в выходную информацию, представляющую собой
заключение об образе.
Примерами задач распознавания являются
медицинская и техническая диагностики, некоторые проблемы прогнозирования
ситуаций, сканирование и автоматический перевод текстов и т.д.
В зависимости от специфики проблемы и исходной
информации формулировки задачи
распознавания очень разнообразны. В общем виде задача распознавания заключается
в следующем: имеется совокупность объектов, в соответствии с выбранным
принципом классификации она подразделена на ряд классов; разработан априорный
словарь признаков, на языке которого описывается каждый класс; определена цель
и описывающий ее показатель эффективности процесса распознавания; с учетом
имеющихся ограничений по ресурсам
выбирается оптимальный набор признаков и строится алгоритм, позволяющий
сопоставить апостериорные данные о неизвестном объекте с априорной информацией
и на основе сопоставления определить, к какому классу он может быть отнесен.
В
работах [1], [2], [5], [7] дается достаточно подробное описание ряда
алгоритмов распознавания разных типов: детерминированные алгоритмы, осно-ванные
на проведении в признаковом пространстве разделяющих границ, вероятностные
алгоритмы, основанные на построении решающих правил, алгоритмы распознавания в
условиях неопределенности, связанные с вычисле-нием гарантированных оценок.
Наличие разных алгоритмов распознавания
поставило вопрос о выборе в каждом конкретном случае наилучшего алгоритма. Эта
задача была поставлена академиком РАН Ю.И. Журавлевым, предложившим и подход к
ее решению, который получил название алгебраического подхода к решению задач
распознавания и классификации. Рассмотрим кратко его суть.
Когда на вход системы распознавания поступает
неизвестный объект, то процедура его отнесения к соответствующему классу может
быть подразде-лена на два этапа.
На первом этапе вычисляется
мера близости неизвестного объекта с каждым классом в соответствующей метрике,
а на втором – в соответствии с тем или иным правилом принимается
окончательное решение о принадлеж-ности объекта к соответствующему классу.
Соответственно этим этапам любой алгоритм
распознавания ![]() может быть
представлен в виде последовательно выполняемых алгоритмов
может быть
представлен в виде последовательно выполняемых алгоритмов ![]() и
и ![]()
Алгоритм ![]() переводит исходную
информацию об объектах в числовую матрицу размерности
переводит исходную
информацию об объектах в числовую матрицу размерности ![]() где
где ![]() общее число объектов;
общее число объектов; ![]() число классов.
число классов.
Алгоритм ![]() переводит полученную
матрицу в матрицу ответов той же размерности, составляющую из символов
переводит полученную
матрицу в матрицу ответов той же размерности, составляющую из символов ![]() Ø. (
Ø. (![]() объект принадлежит к данному классу,
объект принадлежит к данному классу, ![]() объект не относится к данному классу, Ø – не
установлено, относится объект к данному классу или нет [6].
объект не относится к данному классу, Ø – не
установлено, относится объект к данному классу или нет [6].
В работе
[3] разработан метод построения
плоских образов конечных точечных метрических конфигураций, а также создана
программная система для изучения процедур распознавания на основе синтеза
плоских представ-лений метрических конфигураций.
В данной статье продолжаются исследования,
изложенные в работе [3].
1. Модули порождения тестовых конфигураций
Модули предназначены для порождения и синтеза
плоских представ-лений конечных многомерных точечных конфигураций.
В диалоговом режиме на вход алгоритма порождения
подаются значения размерности порождаемой конфигурации, количества точек 1–го и 2–го классов, вид и параметры конфигурации,
уровень шума.
Модуль порождения формирует, используя датчик
случайных чисел, требуемый массив точек и записывает их в файл для дальнейшего
использо-вания.
Модуль синтеза плоского представления конечной
конфигурации, получая на вход имя файла, содержащего конфигурацию, формирует
плоское представление, выводит его на экран и записывает плоские координаты
представляющих точек в соответствующий файл.
Результаты работы модулей представлены на рис.
1, 2.
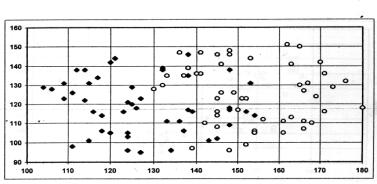
Рис. 1. 2 класса по 50 точек; размерность 3;
шары радиуса 300 с
расстоянием между центрами 200
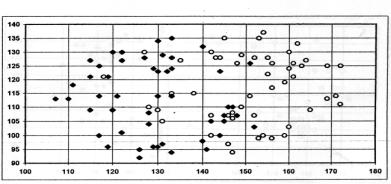
Рис. 2. 2 класса по 50 точек; размерность 4;
шары радиуса 300 с
расстоянием между центрами 200
2. Модули синтеза плоских представлений
Модули предназначены для синтеза ![]() плотных плоских представлений конечных многомерных точечных
конфигураций.
плотных плоских представлений конечных многомерных точечных
конфигураций.
В диалоговом режиме на вход алгоритма заполнения
подается значение параметра ![]() определяющего
максимальную допустимую площадь треуголь-ника в триангуляции выпуклой оболочки
начальной конфигурации.
определяющего
максимальную допустимую площадь треуголь-ника в триангуляции выпуклой оболочки
начальной конфигурации.
На первом шаге процедура формирует выпуклые
оболочки, а на втором шаге полученные слои подвергаются процедуре триангуляции.
Далее всем треугольникам площади большей ![]() сопоставляются новые
точки в исходном пространстве, и производится их оптимальное размещение на
представляющей плоскости.
сопоставляются новые
точки в исходном пространстве, и производится их оптимальное размещение на
представляющей плоскости.
Указанные шаги повторяются вплоть до ситуации,
когда максимальная из площадей треугольников не превышает значения
параметра ![]()
Расширенная конфигурация и результат ее
представления записывается при окончании работы в соответствующий файл.
Результаты работы модулей представлены на рис.
3, 4, 5.
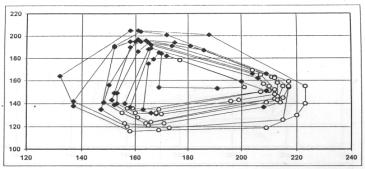
Рис. 3. Выпуклые оболочки: 2 класса по 50 точек;
размерность 10;
шары радиуса 200 с
расстоянием между центрами 100
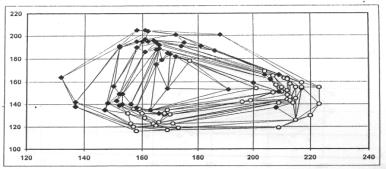
Рис. 4.
Триангуляция конфигурации, изображенной на рис. 3
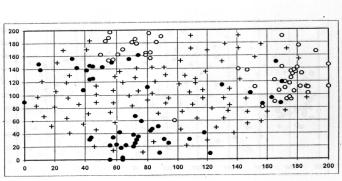
Рис. 5. ![]() плотная конфигурация, порожденная
плотная конфигурация, порожденная
по начальной конфигурации,
представленной на рис. 3
3. Результаты работы
алгоритмов распознавания
С точечными конфигурациями, порожденными
описанными выше модулями проводились эксперименты по настройке и демонстрации
результа-тов работы некоторых алгоритмов распознавания.
Следует отметить экспериментально наблюдающееся
повышение качества решения при возрастании размерности задач.
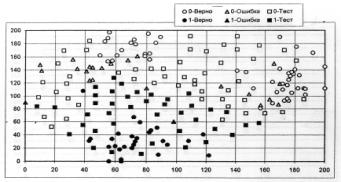
Рис. 6. Результат работы метода потенциальных
функций
на конфигурации,
представленной на рис. 5
Литература:
1. Вапник В.Н., Червоненкис
А.Я. Теория распознавания образов. – М,
1974.
2. Горелик А.Л., Скрипкин
В.А. Методы распознавания. – М ., 2004.
3. Гаджиев Т.С. Методика
изучения процедур распознавания на основе синтеза плоских представлений
метрических конфигураций //Диссертация на соискание ученой степени
к.ф.-м.н. – М., МПГУ, 1996.
4. Матросов
В.Л., Горелик В.А., Жданов С.А. Теоретические основы информатики. – М., 2009.
5. Патрик
Э. Основы теории распознавания образов. – М., 1980.
6. Распознавание,
классификация, прогноз // Под ред. Ю.И.
Журавлева. – М., 1989.
7. Ту Дж., Гонсалес Р.
Принципы распознавания образов. – М., 1978.