Данильченко
В.В., Молдахметов С.С., Якубова М.З.
Казахский
национальный технический университет им. К. Сатпаева, РК
К вопросу о разработке системы управления многоуровневым силовым инвертором
напряжения
Актуальной сегодня
является задача работы на общую нагрузку инвертора совместно с промышленной
энергосистемой. Автоматическое
согласование параметров инвертора с энергосетью можно осуществить с помощью интеллектуальной
системы управления. Адаптивность алгоритма преобразования напряжения
заключается в автоматической подстройке не только амплитуды, частоты и фазы, но
и формы напряжения инвертора в зависимости от изменений промышленной сети.
Поставлена задача
разработать систему управления многоуровневым силовым инвертором, способного
адаптироваться к параметрам промышленной сети.
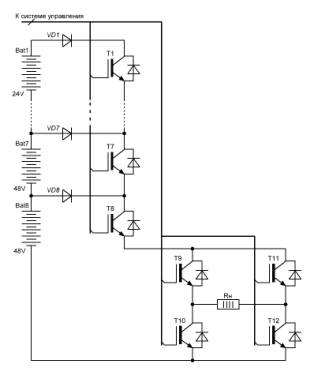
Рисунок 1. – Многоуровневый транзисторный инвертор
На рисунке 1
представлена схема многоуровневого инвертора,
для которого разрабатывается система управления, где каждый из 8 источников постоянного напряжения, соединен между собой
последовательно и через
коммутирующие ключи Т1 – Т8
подключены к мостовому инвертору с
общей нагрузкой, составленному из ключей Т9 – Т12.
Система управления таким
инвертором должна выполнять задачу коммутации ключей Т1 – Т8 в определенной
последовательности, тем самым подключая мостовой инвертор к источникам
постоянного напряжения, а также формировать парафазные
сигналы ТОР и ВОТ для непосредственно мостового инвертора.
В качестве базы для построения
системы управления был выбран микроконтроллер ATmega32 компании Atmel, т.к. данный контроллер
имеет не только АЦП, но и легко позволяет в последующем организовать
многоканальный ШИМ, добавить клавиатуру управления, LCD-индикатор для
организации пользовательского интерфейса, а также получить дополнительные
выходные линии общего назначения.
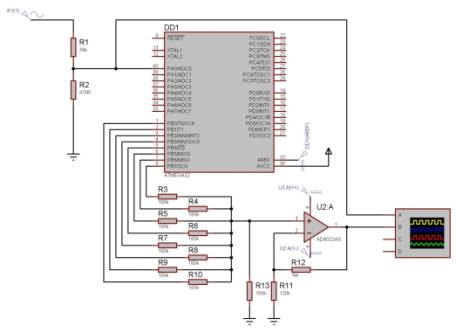
Рисунок 2. – Модель
системы
управления в программной среде Proteus 7
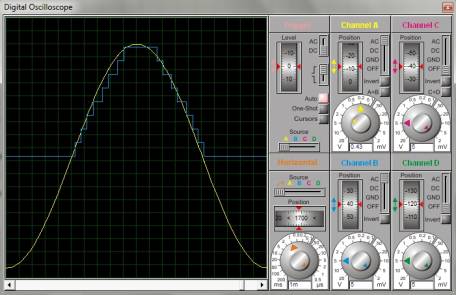
Рисунок
3. – Осциллограмма выходных напряжений системы управления в программной среде Proteus
7
Моделирование
производилось в программной среде Proteus 7. Схема показана на
рисунке 2. В роли промышленной сети выступает генератор синусоидального
напряжения G1 (амплитуда 312 В, частота 50 Гц). Напряжение делится
резисторами R1 и R2 и подается на вход PA0
порта А микроконтроллера, который настроен на работу в режиме АЦП. Для
достижения большей точности выбран режим 10-битного АЦП. В зависимости от
напряжения на входе PA0 на выводах PВ0-PВ7
порта В устанавливаются высокие, либо низкие логические уровни напряжений.
Для наглядности
управляющие импульсы с выводов порта В складываются на сумматоре, собранном на
ОУ AD8022AS. Осциллограмма выходного напряжения сумматора в сравнении с
синусоидальным напряжением сети показана на рисунке 3.
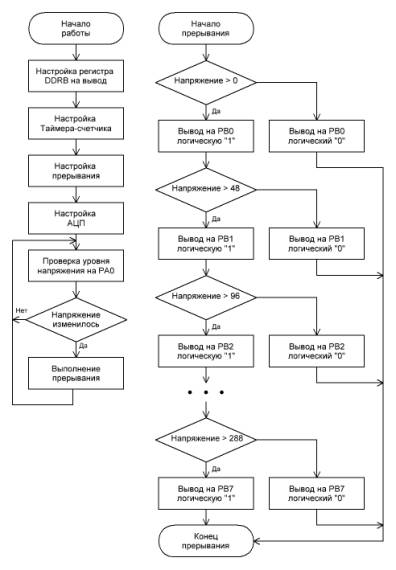
Рисунок
4. – Алгоритм работы микроконтроллера ATmega32
системы
управления инвертором
В дальнейшем планируется
усовершенствовать систему и провести эксперимент. Так, для повышения точности
необходимо использовать внешний источник тактирования. Также имеет смысл
организовать пользовательский интерфейс путем установки клавиатуры и ЖК
дисплея.
Литература:
1.
Семенов
Б.Ю. Силовая электроника: от простого к сложному. – М.: СОЛОН-Пресс, 2005.
2. ATmega32
Data sheet. USA: Atmel Corporation, 2011.