КУРЯЧА О.С., ІЛЛЯШЕНКО Н.М.
Національний технічний університет України «КПІ»
КУТОВИЙ РУХ ГІПЕРЗВУКОВИХ
АПАРАТІВ І ПОХИБКИ ПОПЛАВКОВОГО ГІРОСКОПА
Немає
сумнівів, що найбільш типовим кінематичним збуренням літальних апаратів різного
класу слугує рух фюзеляжу ЛА. Залишаючи осторонь питання особливостей цього рухові
для різних типів апаратів, зупинимося на найбільш складному із зазаначених – на
кутовому русі ракети-носія.
Зв’яжемо з корпусом
систему координат ![]() . Ось
. Ось ![]() зорієнтуємо вздовж поздовжної осі РН, а осі
зорієнтуємо вздовж поздовжної осі РН, а осі ![]() та
та ![]() розташуємо в площині шпангоута
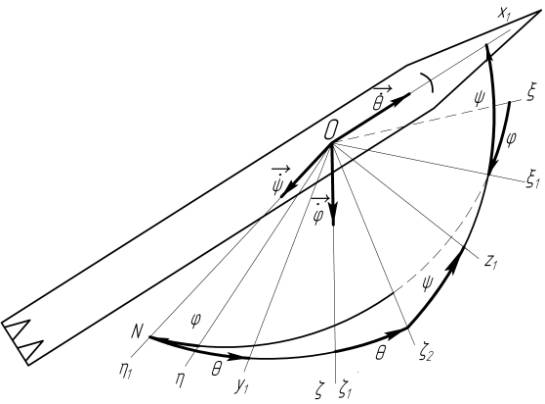
(рис. 1).
розташуємо в площині шпангоута
(рис. 1).
Рис. 1. Схема кутів Ейлера
За опорну
систему оберемо трійку осей, які зв’язані
із Землею, тобто: ось ![]() направимо вертикально вниз, ось
направимо вертикально вниз, ось ![]() розташуємо в горизонтальній
площині, наприклад, сполучимо з лінією заданого курсу, третю ось, ось
розташуємо в горизонтальній
площині, наприклад, сполучимо з лінією заданого курсу, третю ось, ось ![]() , направимо перпендикулярно до перших двох.
, направимо перпендикулярно до перших двох.
Припустимо,
що в момент старту ракета-носій займає довільне положення. Проведемо через її
центр мас площину, перпендикулярну поздовжній осі (площа шпангоута) до претину
з горизонтальною площиною ![]() . По лінії перетину цих площин, позначимо її
. По лінії перетину цих площин, позначимо її ![]() , направимо ось
, направимо ось ![]() і побудуємо в горизонтальній площині ось
і побудуємо в горизонтальній площині ось ![]() перпендикулярно до
перпендикулярно до ![]() .
.
Кутами Ейлера
позначимо кути повороту навколо вертикалі горизонтальної координатної площини ![]() до співпадання її з осями
до співпадання її з осями ![]() . Цей кут будемо іменувати кутом рискання
. Цей кут будемо іменувати кутом рискання ![]() .
.
Кут повороту
навколо лінії вузлів координатної площини ![]() до співпадання осі
до співпадання осі ![]() з поздовжною оссю ракети-носія
з поздовжною оссю ракети-носія ![]() назвемо кутом тангажа і позначимо літерою
назвемо кутом тангажа і позначимо літерою ![]() . В цьому випадку ось
. В цьому випадку ось ![]() займе положення
займе положення ![]() в площині шпангоута.
в площині шпангоута.
Нарешті, кут
повороту площини ![]() навколо поздовжної осі ракети
навколо поздовжної осі ракети ![]() назвемо кутом крена і позначимо літерою
назвемо кутом крена і позначимо літерою ![]() .
.
Відповідно до
обраної послідовності поворотів, кутові швидкості будуть напрямлені по
вертикалі ![]() , по лінії вузлів
, по лінії вузлів ![]() та вздовж осі РН
та вздовж осі РН ![]() (рис. 1).
(рис. 1).
Якщо апарат
стартує з нерухомої основи, тобто осі ![]() нерухомі, проекції кутової
швидкості на осі
нерухомі, проекції кутової
швидкості на осі ![]() , які зв’язані з корпусом ракети, складають:
, які зв’язані з корпусом ракети, складають:
 (1)
(1)
 (2)
(2)
тут ![]() .
.
В тому разі,
коли старт виконується з орбітальної ступені, або з платформи мобільного
базування, слід її кутову швидкість спочатку розкласти по осям ![]() . Так само це відноситься до кутової швидкості добового обертання Землі.
. Так само це відноситься до кутової швидкості добового обертання Землі.
Надалі
вважаємо кут ![]() , а також похідні у часі
, а також похідні у часі ![]() та
та ![]() малими величинами. Кутову швидкість
малими величинами. Кутову швидкість
![]() наведемо у вигляді –
наведемо у вигляді –
![]()
де ![]() – стала величина, яка вимірюється поплавковим
гіроскопом, наприклад, при виконанні РН передбаченого маневрування у
вертикальній площині, тобто по куту тангажа
– стала величина, яка вимірюється поплавковим
гіроскопом, наприклад, при виконанні РН передбаченого маневрування у
вертикальній площині, тобто по куту тангажа ![]() , а
, а ![]() – невелике збурення цієї
кутової швидкості. Такий режим має місце, зокрема, коли апарат рухається
програмною траекторією в пошуках цілі.
– невелике збурення цієї
кутової швидкості. Такий режим має місце, зокрема, коли апарат рухається
програмною траекторією в пошуках цілі.
Складові ![]() та
та ![]() не коять впливу на похибку вимірів,
бо співпадають з напрямком вектора кінетичного моменту
не коять впливу на похибку вимірів,
бо співпадають з напрямком вектора кінетичного моменту ![]() . В той же час, кінематичні збурення
. В той же час, кінематичні збурення ![]() та
та ![]() призводять до появи гіроскопічного
моменту
призводять до появи гіроскопічного
моменту ![]() :
:
![]() (3)
(3)
Очевидно, що
цей чинник породжує похибки вимірів, які обумовлені дією тільки одного збурення
– кутового руху ракети.
Знайшли
розвиток в приладобудуванні багато засобів боротьби з негативною дією хитавиці
основи на гіроскопічні прилади. Це конструктивно-технологічні рішення,
компенсаційні методи та автокомпенсаційні шляхи усунення цього впливу.
Застосування тих чи інших рішень підпорядковане тактико-технічних пріоритетів
окремого класу літальних апаратів.
Іншими
словами, що найважливіше – точність побудови системи координат чи питання
масо-габаритних обмежень.