*119813*
Аспирант Фомин
М.Н.
Национальный исследовательский ядерный
университет «МИФИ»
Методы планирование
траектории движения коллектива роботов, выполняющих исследование окружения.
·
С
развитием робототехники актуальной задачей становится разработка
робототехнических систем, в которых существует возможность совместного
функционирования нескольких роботов (коллектив роботов) [1]. Использование
коллектива роботов существенно повышает эффективность выполнения задачи, а так
же обеспечивает оперативное и своевременное реагирование на изменения условий,
в которых осуществляется его функционирование [2]. Однако использование
коллектива требует разработки методов планирования совместных действий.
На
данный момент существует несколько активно используемых моделей управления
коллективом роботов, в которых может быть определен как единый управляющий
элемент в коллективе, так и распределение управляющих элементов системы [1].
Однако практическое применение данные модели находят в очень узком и
ограниченном кругу проблем (имитация поведения насекомых, реализация
автоматизации производства, разработка роботов для участия в футбольных
соревнованиях и т.д.), что не позволяет использовать существующие моделей для
робототехнических комплексов разведывательного назначения.
На
ряду с проблемой управления совместных действий коллектива роботов не менее
важным является определение модели поведения каждого отдельного робота в
коллективе (направление и скорость его передвижения к заданной целевой точке)
[2]. Реализации решения данного рода проблемы уделено так же не мало внимания,
но существующие модели функционируют в определенном заранее заданном окружении,
что не позволяет использовать их в разведывательных задачах.
Планирование
траектории движения отдельного робота из коллектива осуществляется исходя из
решения задачи определения в системе наиболее подходящего робота, способного с наибольшей
эффективностью справиться с построением выбранного участка исследуемой
местности. Эффективность выполнения задачи оценивается по следующим параметрам:
1) Свобода перемещения в окружающей среде.
Габариты робота или степени свободы его перемещения могут существенно повлиять
на скорость получения данных об разведываемой местности и на их полноту.
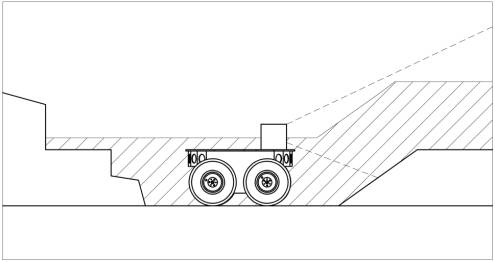
Рисунок 1. Рабочая зона исследовательского робота.
2) Оценка возможности получения
наиболее полной информации об окружении за наименьшее затраченное время. При
выборе траектории перемещения агентов системы необходимо учесть способность их
функционирования в различных условиях внешней среды. Для каждого агента системы
должны быть определены его рабочие параметры, которые указываются исходя из
функционального оснащения агента (наличие определенных типов оборудования,
проходимость, производительность) [3].
3) Наличие значительных препятствий,
обнаруженных в исследуемой среде, так же может повлиять на работу всего
коллектива [5]. В качестве препятствия могу выступать как объекты окружения,
так и сами роботы , входящие в коллектив [4]. Для решения данной задачи
управляющий элемент коллектива роботов должен динамически пересчитывать
траекторию передвижения всего коллектива, исключая при этом любые возможные
столкновения.
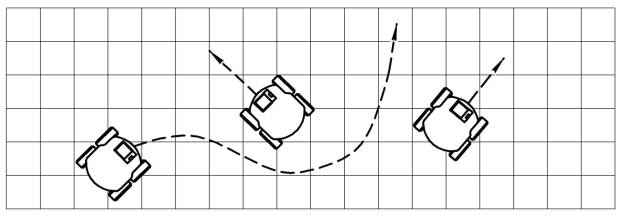
Рисунок 2. Корекция
траектории передвижения робота.
4) Синхронизация перемещения
агентов. Агент коллектива роботов не должен препятствовать свободному
перемещению других агентов на исследуемой местности [3]. Управляющий элемент
коллектива роботов должен решить задачу возможности совместного
функционирования нескольких агентов коллектива на одном выделенном участке
местности.
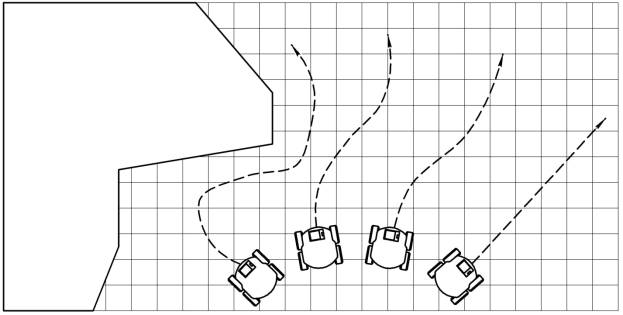
Рисунок 3. Динамическое изменение траектории
движения коллектива.
В случае если в
коллективе роботов не найден робот, способный дать оценку заданному участку
исследуемой местности, такой участок помечается как не доступный к
исследованию. В дальнейшем при использовании полученной карты местности,
неисследованные ее участки, подлежат повторному изучению или признаются
полностью недоступными.
Вывод:
предложенный
метод планирования траектории движения позволяет существенно повысить
эффективность совместного функционирования коллектива роботов, выполняющего
исследование окружения, благодаря определению более точной модели
поведения каждого отдельного робота в коллективе. Рассмотренный подход
впоследствии может найти широкое применение в робототехнике.
Литература:
1.
Каляев И.А., Гайдук А.Р., Капустян С.Г.
Распределенные системы планирования действий коллективов роботов. – М.:
«Янус-К», 2002.
2.
Казиев В.М. Математика и
информатика (в 3-х частях). – М.: «Центр», 2001.
3. Bernardine Dias M.,
Anthony (Tony) Stentz A Market Approach to Multirobot Coordination // CMURI
-TR-01-26. – Carnegie Mellon University, 2001.
4. Z. Bien and J. Lee,
A Minimum-time trajectory planning method for two robots, // IEEE Trans.
Robot. Automat., vol. 8, 1992.
5.
S. J. Buckley, Fast motion planning for multiple moving robots // IEEE
Int. Conf. on Robotics and Automation, Scottsdale, AZ, 1989.