Технические науки/2. Механика
Поддевалин В.М., Буторева В.С., к.т.н.
Гурвич Ю.А.
ГУО «Институт пограничной службы Республики Беларусь»
Многокритериальная оптимизация параметров рулевой трапеции
автобуса «МАЗ» при переменном значении шкворневой колеи и базы машин
В данной статье описывается алгоритм и
комплекс программ, который позволяет: на стадии проектирования колесных машин создать
шестизвенную рулевую трапецию для целого семейства автобусов и автомобилей с
разными базами и колеями.
Под механико-математической
моделью рулевой трапеции понимается
совокупность схемы (рисунок 1) и формализованной связи − математического
описания b = b(a,l1,..,lj,g1,..,gm),
где b – угол поворота внешнего
управляемого колеса машины; a - угол поворота внутреннего колеса; l1,…,lj – управляемые параметры; j – количество управляемых параметров; g1,…,gm – неуправляемые параметры; m- количество неуправляемых параметров.
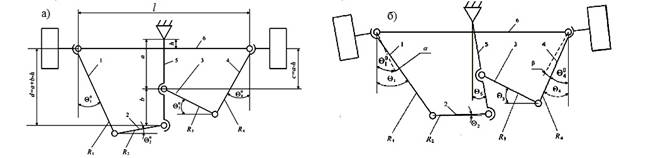 Рисунок
1 − Схема рулевой трапеции автобуса «МАЗ»: а) колеса автобуса находятся в
нейтральном положении; б) внутреннее колесо автобуса, совершающего левый
поворот, повернуто на угол a, наружное колесо − на угол b
Рисунок
1 − Схема рулевой трапеции автобуса «МАЗ»: а) колеса автобуса находятся в
нейтральном положении; б) внутреннее колесо автобуса, совершающего левый
поворот, повернуто на угол a, наружное колесо − на угол b
При синтезе параметров
шестизвенной рулевой трапеции используется зависимость угла поворота наружного
колеса ![]() от угла поворота внутреннего
колеса α и других конструктивных параметров:
от угла поворота внутреннего
колеса α и других конструктивных параметров:
 , (1)
, (1)
где  ,
,  ,
,

В общем виде движение пневмоколесной
машины без рулевой трапеции по криволинейной траектории без бокового скольжения
колес описывается зависимостью:
bN=bN (a,l¢1N,…,l¢mN), (2)
где l¢1,…,l¢m - различные параметры машины (геометрические, инерционные
и т. д.); m - количество параметров; bN – угол
поворота внешнего управляемого колеса машины.
В литературе (2) известно как уравнение котангенсов
(или как уравнение идеального поворота машины):
ctgβN
− ctgα = L /M, (3)
где
L – шкворневая колея машины (в формуле (1) Ɩ=L); M– база машины.
Чтобы движение машины с рулевой
трапецией наилучшим образом
(тем не менее,
− приближенно) отобразило зависимость (3), необходимо варьировать все
значения управляемых параметров l1,…,lj. Затем из набора совокупностей значений параметров выбирается такая
совокупность параметров (l1, lj; g1, gm), которая
соответствует максимальному приближению (или близости) (1) к (3). При этом
возникают вопросы, что принять за меру близости двух зависимостей и как
выразить математически степень близости зависимостей b и bN друг к
другу?
Из функционального анализа известно,
что в пространстве функций x(t), определенных и непрерывных при a ≤ t ≤
b существуют различные нормы: чебышевская с равномерной
сходимостью по ней и гильбертовская со среднеквадратичной сходимостью.
Примем за меры близости двух
зависимостей: теоретической bi и
идеальной bNi
– норму Гильберта F (где i – число
точек на кривых), которую используем в качестве критерия оптимальности − показателя,
оценивающего износ шин и качество проектирования технической системы:
 . (4)
. (4)
Известны размеры и
углы несимметричной шестизвенной рулевой
трапеции (рисунок 1,а). При повороте стержня 1 на угол α стержень 4
повернется на угол β (рисунок 1,б).
Из восьми параметров в (1): Ɩ, R1,
R2, R3, h, Θ1, Θ2, Θ3 − независимых шесть, так как имеет
место четыре связи.
Постановка
задачи синтеза. Варьируя шестью независимыми
параметрами в различных сочетаниях, реализовать − гильбертовскую норму со
среднеквадратичной сходимостью, при переменных значениях шкворневой колеи
Ɩ и баз М машин.
Выбор оптимальных
параметров рулевой трапеции по критерию износа шин (который формализован в виде
нормы Гильберта) при постоянных величинах шкворневой колеи Ɩ и базы машины
M осуществляется методами нелинейного программирования.
При одновременном варьировании
k −
значениями шкворневой колеи и q − значениями базы машин реализация (4) осуществляется методами многокритериальной оптимизации. Это
резко усложняет решение задачи: количество вычислительных процедур возрастает в
k*q раз.
Параметры
оптимизации:
R1 − продольный рычаг рулевой трапеции;
R2 – поперечный рычаг рулевой трапеции;
R3 – поперечный рычаг рулевой трапеции;
![]() − угол наклона
R1 к продольной оси машины;
− угол наклона
R1 к продольной оси машины;
![]() − угол наклона
R2 к поперечной оси машины;
− угол наклона
R2 к поперечной оси машины;
![]() − угол наклона
R3 к поперечной оси машины;
− угол наклона
R3 к поперечной оси машины;
Ɩk – колеи машин;
Mq – базы машин.
Параметрические
ограничения:
R1min ≤ R1 ≤ R1max;
R2min ≤ R2 ≤ R2max;
R3min ≤ R3 ≤ R3max;
![]() min ≤
min ≤ ![]() ≤
≤ ![]() max;
max;
![]() min ≤
min ≤ ![]() ≤
≤ ![]() max;
max;
![]() min ≤
min ≤ ![]() ≤
≤![]() max;
max;
Ɩmin ≤ Ɩ ≤ Ɩmax;
Mmin ≤ M ≤
Mmax.
Алгоритм многокритериальной оптимизации
параметров шестизвенных рулевых трапеций различных конструкций реализован в
виде программного пакета «Trapezia», который
позволяет:
впервые решить задачу однокритериальной
(критерий – износ шин) оптимизации параметров несимметричных шестизвенных
рулевых трапеций при постоянных значениях
базы M и колеи Ɩ машины;
создать оптимальную шестизвенную рулевую
трапецию при переменных сочетаниях баз Mq и шкворневой колеи Ɩk машин;
сократить сроки проектирования машин и повысить их
качество.
|
Рисунок 2 − Главное окно комплекса программ оптимизации параметров шестизвенных рулевых трапеций с переменной
колеей и базой машин |
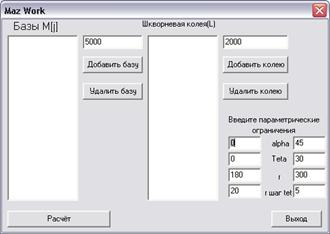
В главном окне рисунка 2 находятся два
списка «Список баз M,мм» и «Список колей L,мм (в нашем случае Ɩ)» куда заносятся значения
размеров баз и колеи, посредствам кнопок «Добавить базу» и «Добавить колею».
В случае постоянных значений базы и шкворневой
колеи машины в главное окно рисунка 2 заносится по одному значению Ɩ и M.
В случае переменных значений базы и
шкворневой колеи машины в главное окно рисунка 2 заносится значения размеров
баз и колеи из соответствующих полей Mmin
≤ M ≤ Mmax,
Ɩmin ≤ Ɩ ≤ Ɩmax.
|
|
Рисунок 3 −
Окно с результатами оптимизации несимметричной шестизвенной рулевой трапеции с
переменной колеей и базой машин |
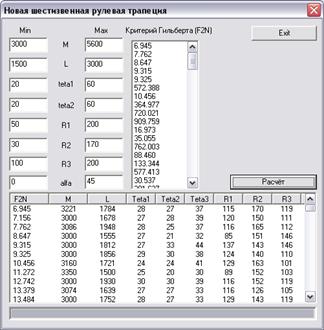
В поля в столбцах «Min» и «Max» вводятся нижняя
и верхняя границы интервалов значений параметров, которые задаются
пользователем: R1min, R1max, R2min, R2max, R3min, R3max, ![]() min,
min, ![]() max,
max, ![]() min,
min, ![]() max,
max, ![]() min,
min, ![]() max.
max.
Резюме. Разработан комплекс программ многокритериальной
оптимизации параметров шестизвенных рулевых трапеций различных конструкций
(симметричных и несимметричных) при постоянных значениях базы M и колеи Ɩ
машины и при переменных сочетаниях баз Mq и шкворневой колеи Ɩk
машин.
Комплекс программ позволяет: на стадии
проектирования колесных машин создать оптимальную рулевую трапецию для целого
семейства автобусов и автомобилей (с разными базами и колеями); сравнивать
существующие конструкции рулевых трапеций колесных транспортных средств с
оптимальными и наметить пути их улучшения.