Даниленко С.И., руководитель д.т.н. Воронцов А.Г.
Донецкий национальный технический университет
УСОВЕРШЕНСТВОВАНИЕ СИНХРОГЕНЕРАТОРОВ
НА ОСНОВЕ ФАПЧ
При построении современной
телекоммуникационной сети, в которой совместно работают многочисленные цифровые
системы, важную роль выполняет подсистема синхронизации. Её качество напрямую
влияет на работоспособность сети. Для приема переданной информации необходимым
условием является поддержание синхронизма, для того чтобы избежать потери
данных.
Довольно часто для выделения синхросигнала
используют приемники, выполненные на основе фазовой автоподстройкой частоты
(ФАПЧ). Это система с обратной связью, которая непрерывно отслеживает ошибку
взаимного расположения фронтов импульсов, приходящих из линии связи и цепи обратной
связи. Т.е. если появляются какие-то различия между расположением фронтов этих
сигналов, то система формирует управляющие сигналы, которые позволяют
скорректировать сигнал обратной связи, чтобы устранить несоответствие.
Из-за несовершенства применяемого
аппаратного и программного обеспечения, синхросигнал, достигая узла назначения,
претерпевает изменения, которые могут негативно сказаться на работе системы
синхронизации. Искажения сигнала могут быть настолько сильными, что система
ФАПЧ может выйти из режима синхронизма и начать процесс подстройки фазы, когда
в действительности в этом не было необходимости. В связи с этим, система ФАПЧ
должна обладать достаточной помехоустойчивостью, чтобы ошибочные перестройки
возникали как можно реже. С другой стороны, если действительно возникла
необходимость подстройки фазы, то система ФАПЧ должна довольно быстро
перестроиться, потому что во время переходного процесса система передачи данных
будет находиться в режиме простоя, т.е. все данные, переданные в этот период,
будут утеряны. Тут может возникнуть противоречие. Повысить помехоустойчивость
системы можно, сделав её более узкополосной, тем самым увеличить её
инерционность. Это позволит ФАПЧ быть не чувствительной к непродолжительным
помехам и фазовой нестабильности, но вместе с этим ухудшаются динамические
характеристики системы. То есть, если на неё будет воздействовать достаточно
продолжительная помеха, которая приведет к срыву слежения, тогда режим
синхронизма будет восстанавливаться дольше, чем в случае исходной ФАПЧ. Если же
наоборот улучшить динамические характеристики, сделав систему широкополосной,
то это позволит сократить время захвата слежения, но при этом даже не
продолжительные помехи будут выводить систему из режима синхронизма.
Частые срывы синхронизации или длительное
время восстановление синхронизма, в конечном счете, приводит к потере
передаваемых данных и соответствующим последствиям.
Целью данной работы является минимизация
потери данных за счет повышения помехоустойчивости и уменьшения времени
захвата.
Задачи работы:
1. Предложить структуру, которая позволит
повысить помехоустойчивость ФАПЧ.
2. Выполнить анализ существующих систем
ФАПЧ с минимизацией времени захвата.
3. Разработать структуру ФАПЧ с повышенной
помехоустойчивостью и минимальным временем захвата.
Повышение
помехоустойчивости.
При передаче через линии и узлы связи,
сигнал синхронизации искажается из-за
воздействия помех и не идеальности применяемого оборудования. Причин для
искажений довольно много, но проявляться они чаще всего в виде уширения или
дробления импульсов, а также временном пропадании эталонного сигнала
синхронизации.
Как правило, помехи носят случайный
характер, поэтому чаще всего они проявляется в виде нескольких “выбросов”, а не
в продолжительной последовательности.
Данный признак можно использовать для повышения помехоустойчивости цифровых
систем ФАПЧ.
Представленная ниже схема делает систему
ФАПЧ нечувствительной к непродолжительным помехам (Рис.1).
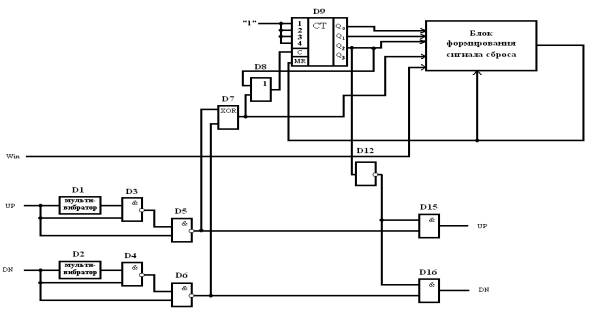
Рис. 1 – Блок анализа срыва
Как известно, фазовый компаратор сопоставляет
сигнал, приходящий из линии связи, с сигналом на выходе ГУН [1]. Чтобы достичь,
а затем и поддерживать правильное фазовое соотношение между этими сигналами,
фазовый компаратор непрерывно отслеживает ошибку взаимного расположения фронтов
этих сигналов и формирует корректирующие импульсы ускорения UP и замедления
DOWN темпа работы ГУН. Блок анализа срыва, представленный на рис. 1, с помощью
счетчика подсчитывает количество пришедших подряд корректирующих импульсов UP или DOWN с фазового
детектора. Если их количество меньше чем установленное число в счетчике, тогда
блок анализа срыва не позволяет корректирующим импульсам воздействовать на ГУН.
Когда наблюдается большое количество подряд идущих корректирующих импульсов,
счетчик перестает подсчитывать импульсы и позволяет воздействовать на ГУН,
чтобы подстроить фазу.
С помощью счетчика можно регулировать
чувствительность системы к помехам, устанавливая максимальное число
корректирующих импульсов, после которого счетчик перестанет считать импульсы и
позволит воздействовать на ГУН.
Моделирование данного метода необходимо
провести для двух случаев: при воздействии шумов и в случае, когда произошло
смещение и нужно подстроить фазу синхросигнала.
На рис. 2 – 4 представлены графики,
отражающие логику работы схемы при воздействии на неё шумов, которые вводились
в сигнал, поступающий из линии связи на фазовый детектор.

Рис. 2 – Корректирующие импульсы, поступающие с
фазового детектора

Рис. 3 – Сигнал на выходе счетчика при воздействии
шума

Рис. 4 – Формируемые импульсы сброса
Из графиков видно, что с появлением
первого рассогласования фаз на 2 мкс счетчик начинает подсчет корректирующих
импульсов, приходящих с фазового детектора. Так как помехи воздействуют на
детектор не постоянно, а порциями не более трех-четырех подряд идущих скачков,
то логика схемы формирует импульсы сброса, которые не дают воздействовать на
ГУН и тем самым выводить систему из режима синхронизма.
Для оценки эффективности
усовершенствованной системы было проведено моделирование исходной системы ФАПЧ
в таких же условиях. Результаты показали,
что при таком же уровне шума исходная система ФАПЧ теряет режим захвата
и не может восстановить синхронизм. С приходом первой помехи в системе
начинается переходный процесс, который не может закончиться до тех пор, пока не
перестанут поступать помехи, т.к. каждый новый импульс с детектора вновь
сбивает систему.
Таким образом, блок анализа срыва
позволяет работать системе синхронизации корректно при воздействии шумов, в то
время как исходная система ФАПЧ переходит в режим перестройки и тем самым
инициирует процесс потери данных.
Моделирование было также проведено для
случая, когда происходит смещение фазы (рис. 5 - 7).

Рис. 5 – Сигнал на выходе счетчика при смещении фазы

Рис. 6 – Сформированный импульс сброса

Рис. 7 – График переходного процесса в системе ФАПЧ с
блоком анализа срыва при смещении фазы
Как и в случае с воздействием помех
счетчик начинает счет с приходом первого импульса, но после того как счетчик
досчитал до заданного числа, блок анализа срыва позволяет воздействовать на ГУН
и вся система начинает работать как исходная ФАПЧ. Из графиков 5 и 7 видно, что
счетчик начал счет раньше, чем начался переходный процесс в системе. Эта
задержка определяется числом импульсов, заданным в счетчике. Работа блока
восстанавливается, после того как перестают поступать сигналы рассогласования с
детектора и вследствие чего формируется сигнал сброса.
Аналогичное исследование было проведено
для исходной системы ФАПЧ. График переходного процесса представлен на рис. 8.

Рис. 8 – График переходного процесса в исходной
системе ФАПЧ при смещении фазы
Из графика видно, что переходный процесс
начался с приходом первого корректирующего импульса и поэтому заканчивается
раньше, чем в случае с блоком анализа срыва.
Уменьшение времени захвата.
Для уменьшения времени захвата можно применять схему представленную на
рис. 9 [2]. Представленная структура ФАПЧ позволяет улучшить работу
стандартного ФАПЧ при помощи включения модуля, который управляет коэффициентом
усиления, в зависимости от того насколько ФАПЧ далека от захвата. Когда система
ФАПЧ далека от захвата, то желательно иметь большой коэффициент усиления чтобы
улучшить время замыкания. В то же время, желателен малый коэффициент усиления,
когда ФАПЧ в режиме слежения, чтобы контролировать уровень джиттера. Модуль
контроля усиления оценивает, как далеко ФАПЧ от захвата с помощью счета длины
потока последовательных импульсов UP или DN.
Когда в последовательности наблюдается большое число импульсов UP или DN, то считается, что ФАПЧ далека от захвата,
поэтому модуль контроля усилением дает на выходе большое усиление. Вместе с
этим, если присутствует малочисленная последовательность импульсов UP или DN, которая типична для ФАПЧ колеблющегося вокруг
захвата, то усиление уменьшено.
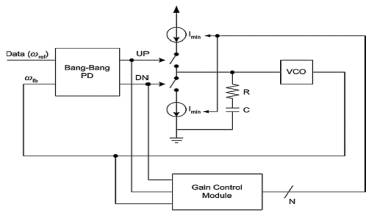
Рис.
9 – Схема с контролем усиления
Модуль контроля усилением вычисляет коэффициент усиления ФАПЧ в течение
следования последовательных импульсов UP или
DN:
![]() (1)
(1)
Где k – константа, которая больше
чем l, и l – длина поступающего потока последовательных импульсов UP или
DN. Этот метод дает существенное влияние на время захвата.
Чтобы оценить преимущество данного метода,
моделирование было проведено для исходной системы ФАПЧ и системы с модулем
контроля усилением в одинаковых условиях (рис. 10 – 11).

Рис. 10 – График переходного процесса в исходной
системе ФАПЧ

Рис. 11 – График переходного процесса в системе ФАПЧ с
модулем контроля усилением
Моделирование показало, что в случае
исходной системы ФАПЧ переходный процесс заканчивается на 94 мкс, а при
использовании модуля – на 74 мкс. Разница между величинами характеризует
эффективность работы модуля.
Разработка
объединенной структуры.
Повышение помехоустойчивости вместе с
уменьшением времени захвата может существенно улучшить работу систем
синхронизации. Это позволит свести к минимуму потерю данных из-за плохого
качества синхросигнала.
Для проверки объединенной структуры
моделирование было проведено только для случая смещения фазы, потому что только
в этом случае будет осуществляться воздействие на ГУН. На рис. 12 представлен
график переходного процесса системы ФАПЧ только с блоком анализа срыва, а на
рис. 13 график отображающий процесс перестройки при объединении двух схем.

Рис. 12 – График переходного процесса в системе ФАПЧ с
блоком анализа срыва

Рис. 13 – График переходного процесса в системе ФАПЧ с
блоком анализа срыва и модулем контроля усилением
Из графиков видно, что добавление модуля
контроля усилением значительно уменьшило время переходного процесса. Модуль
контроля усилением позволяет не только скомпенсировать время, которое
добавляется при повышении помехоустойчивости, но и уменьшает время захвата еще
на 20 мкс по сравнению с исходной системой ФАПЧ (рис. 14).

Рис. 14 – График переходного процесса в исходной
системе ФАПЧ при смещении фазы
Выводы.
Таким образом, блок анализа срыва
позволяет повысить помехоустойчивость системы ФАПЧ. Причем уровень
помехоустойчивости можно регулировать, задавая в счетчике число, досчитав до
которого он позволит воздействовать на ГУН. Следует отметить, что если задать
очень большое число, то при смещении фазы система ФАПЧ начнет позже
перестраиваться, и, следовательно, переходный процесс закончится позже. Данный
недостаток можно устранить использованием модуля контроля усилением, который
позволят сократить время захвата. Моделирование показало, что объединенная
структура позволяет значительно сократить время захвата. Это позволяет, сделать
систему еще более помехоустойчивой за счет установки большего числа импульсов в
счетчике. Следовательно, данный синтез позволит системе ФАПЧ работать в
условиях воздействия сильных помех, при которых исходная система не сможет
выполнять свои функции.
Литература
1. Сухман С.М. Синхронизация в
телекоммуникационных сетях. Анализ инженерных решений / С.М. Сухман, А.В.
Бернов, Б.В. Шевкопляс – М.: Эко-Трендз, 2005 – 260 с.
2. Michael J. Chan. A bang-bang PLL employing
dynamic gain control for low jitter and fast lock times [электронный ресурс] / Michael J. Chan,
Adam Postula, Yong Ding, Lech Jozwiak / - Режим доступа к статье: http://www.springerlink.com/content/7350rw1157746287