Математика / 1.Дифференциальные и интегральные уравнения
ФГУП «Сибирский научно- исследовательский институт авиации
им. С.А. Чаплыгина», Россия
Приближенно- аналитические
соотношения динамики
продольного возмущенного движения автожира
К.т.н. Калмыков А.А.
Актуальность аналитического
исследования динамики автожира обусловлена необходимостью предварительной
оценки динамических характеристик автожира при проектировании [1], на которые существенное влияние оказывает
непостоянство частоты вращения несущего винта (НВ).
При изменении параметров движения автожира (скорости полета V, угла атаки ротора aр, и
т.д.) с некотором фазовым отставанием из-за инерционности изменяется частота
вращения авторотирующего НВ w, что, в свою очередь, приводит к изменению сил и моментов
НВ, действующих на автожир.
В работе исследован переходный процесс после ступенчатой перекладки
ротора на угол Ddв в
установившемся горизонтальном полете (ГП).
Решим линеаризованную систему уравнений возмущенного продольного
движения, включающую дополнительное уравнение углового ускорения НВ, записанных
в скоростной системе координат (СК), рисунок 1:
![]() ; (1)
; (1)
![]() ; (2)
; (2)
![]() ; (3)
; (3)
![]() ; (4)
; (4)
![]() ; (5)
; (5)
где Х, Y – суммы проекций сил частей летательного аппарата
(ЛА) на оси скоростной СК (индекс «а» опущен); Р – тяга
двигателя; J – угол тангажа корпуса
автожира; ![]() – угол наклона
траектории; aк – угол атаки корпуса; Iz – момент инерции автожира; Iр –
момент инерции НВ относительно оси вращения; Мz – моменты тангажа, создаваемые частями ЛА; Мкр.
– крутящий момент НВ; wz = dJ / dt – угловая скорость тангажа.
Значения сил отнесены к полетной массе автожира m0.
Индекс «р» («ротор») в обозначениях переменных относится к НВ, «к»
– к корпусу автожира, «го» – к горизонтальному оперению; V2 – скорость
за винтом; Хвр. – сопротивление корпуса. Индекс «0» означает,
что значение переменной относится к исходному режиму полета.
– угол наклона
траектории; aк – угол атаки корпуса; Iz – момент инерции автожира; Iр –
момент инерции НВ относительно оси вращения; Мz – моменты тангажа, создаваемые частями ЛА; Мкр.
– крутящий момент НВ; wz = dJ / dt – угловая скорость тангажа.
Значения сил отнесены к полетной массе автожира m0.
Индекс «р» («ротор») в обозначениях переменных относится к НВ, «к»
– к корпусу автожира, «го» – к горизонтальному оперению; V2 – скорость
за винтом; Хвр. – сопротивление корпуса. Индекс «0» означает,
что значение переменной относится к исходному режиму полета.
Рисунок 1 – Схема сил, действующих на автожир
Используя метод малых
возмущений [2], линеаризуем систему (1)–(4) относительно исходного режима установившегося
ГП:
d(DV)/dt = ![]() ×{[PV cos aк0 –(
×{[PV cos aк0 –(![]() +
+![]() )]DV– (P0 sin aк0 +
)]DV– (P0 sin aк0 +![]() )Daк
)Daк
+ (![]() –
–![]() )×
)×![]() –
–![]() Dw – m0 g
Dq + F1}, (6)
Dw – m0 g
Dq + F1}, (6)
![]() =[m0 V0]-1×{(
=[m0 V0]-1×{(![]() +
+![]() +
+![]() +PV sin aк0)DV+(
+PV sin aк0)DV+(![]() +
+![]() +
+![]()
+Р0 cos aк0)Daк +(![]() +
+![]() +
+![]() )×
)×![]() +
+![]() Dw+ F2}, (7)
Dw+ F2}, (7)
![]() =
= ![]() ×{
×{![]() DV +
DV +![]() Daк +
Daк + ![]() ×
×![]() +
+![]() Dw + F3}, (8)
Dw + F3}, (8)
![]() =
= ![]() ×{
×{![]() DV+
DV+ ![]() Daк
+
Daк
+ ![]() ×
×![]() +
+![]() Dw + F4}; (9)
Dw + F4}; (9)
где F1…F4 – значения возмущающих сил и моментов
При рассмотренном ступенчатом отклонении НВ на угол Ddв,
приращение aр вызовет соответствующее изменение линейных и угловых ускорений:
![]() =(-
=(-![]() /m0)Ddв;
/m0)Ddв; ![]() =(
=(![]() /[m0V0])Ddв;
/[m0V0])Ddв; ![]() =(
=(![]() / Iz)Ddв;
/ Iz)Ddв; ![]() =(
=(![]() /Ip)Ddв.
/Ip)Ddв.
Обозначим в (6) - (9)
выражения перед DV, Daк
и т.д., отнесенные соответственно к m0, m0V0, Iz и Iр, коэффициентами сik, где i – номер
уравнения по порядку, k
– обозначение переменной, при
которой стоит коэффициент. Значения частных
производных НВ могут быть найдены аналитически [3],
получены с помощью численной имитационной модели (ИМ) динамики автожира [1, 4] или определены экспериментально.
Исключив q с помощью
уравнения связи (5) и используя символ дифференцирования р,
уравнения (6) - (9) принимают вид:
АU = –![]() , где
, где ![]() – вектор внешнего
возмущения (управления):
– вектор внешнего
возмущения (управления):
|
(с1V –р) |
( |
( |
с1w |
´ |
DV |
= – |
|
. (10) |
|
с2V |
(р + |
( |
с2w |
Daк |
|
|||
|
с3V |
|
( |
с3w |
|
|
|||
|
с4V |
|
|
(с4w– р) |
Dw |
|
Характеристическое уравнение запишется в виде:
a5 р5
+ а4 р4 + а3 р3 + а2 р2
+ а1 р + а0 = 0; (11)
где a5
= 1;
a4 =![]() - с1V -
- с1V - ![]() - с4w;
- с4w;
a3 =
с1V с4w - с1V![]() + с1V
+ с1V![]() +с4w
+с4w![]() - с4w
- с4w![]() -
-![]()
![]() + с2w
+ с2w ![]() -
-![]() +
+![]()
![]() - с3w
- с3w![]() + с2V
+ с2V![]() + с2V g -
+ с2V g - ![]() с3V - с1w с4V;
с3V - с1w с4V;
a2=с1V с4w![]() -с1V с4w
-с1V с4w![]() +с1V
+с1V![]()
![]() -с1V с2w
-с1V с2w![]() +с1V
+с1V![]() -с1V
-с1V![]()
![]()
+с1V с3w![]() +с4w
+с4w ![]()
![]() +с2w
+с2w ![]()
![]() +
+![]() с3w
с3w![]() - с3w
- с3w ![]()
-
с2w![]()
![]() +
+![]() с4w -
с4w -![]()
![]() с4w - с3w
с4w - с3w![]()
![]() - с2V
- с2V![]() с4w
с4w
-с2V с4w g -с2V![]()
![]() -с2Vg
-с2Vg![]() +с1wс2V
+с1wс2V![]() +
+![]() с2V
с2V![]() + с3V
+ с3V![]()
![]()
-
с3V![]() + с3V g
+ с3V g![]() - с1w с3V
- с1w с3V![]() +
+![]() с3V с4w -
с3V с4w -![]()
![]() с3V +с1w
с3V +с1w![]() с4V
с4V
-
с1w ![]() с4V -
с4V - ![]() с3w с4V +
с3w с4V +![]() с2w с4V +с2w с4V g;
с2w с4V +с2w с4V g;
a1=![]() с2V
с2V![]() с4w+с2V
с4w+с2V![]() с4w g+с1w с2V
с4w g+с1w с2V![]()
![]() +
+![]() с2Vс3w
с2Vс3w![]()
-с1w с2V![]()
![]() - с2V
- с2V![]() g -
g -![]() с2V
с2V![]() с4w -
с4w -![]() с2Vс3w
с2Vс3w![]() -с2Vс3w
-с2Vс3w![]() g
g
- с3V![]()
![]() с4w + с3V
с4w + с3V![]() с4w – с3Vg
с4w – с3Vg![]() с4w + с3V gс4w –
с4w + с3V gс4w – ![]() с2wс3V
с2wс3V![]()
- с1w ![]() с3V
с3V![]() +с1w
+с1w![]() с3V
с3V![]() - с1w с3V
- с1w с3V![]() - с3Vс4wg +
- с3Vс4wg +![]()
![]() с3Vс4w
с3Vс4w
+![]() с3Vg+
с3Vg+![]() с2wс3V
с2wс3V![]() + с2w с3V
+ с2w с3V![]() g +
g +![]() с3w с4V
с3w с4V![]() +
+![]() с3w с4Vg
с3w с4Vg
-![]() с3w с4V – с3w с4V g + с1w
с3w с4V – с3w с4V g + с1w![]()
![]() с4V +
с4V +![]() с2w
с2w![]() с4V + с1w
с4V + с1w![]() с4V
с4V
- с1w![]()
![]() с4V+с3w с4V g-
с4V+с3w с4V g-![]()
![]() с3w с4V -
с3w с4V -![]() с2w
с2w![]() с4V -с2w
с4V -с2w![]() с4V g;
с4V g;
a0= g (с2V ![]() с4w - с2V с3w
с4w - с2V с3w ![]() +с2w с3V
+с2w с3V![]() -
-![]() с3V с4w -с2w
с3V с4w -с2w![]() с4V
с4V
+![]() с3w с4V).
с3w с4V).
Первый вещественный корень характеристического уравнения (11) находится численно, после чего степень
уравнения понижается до четвертой, решение которого известно.
Для оценки влияния непостоянства частоты вращения НВ на устойчивость
движения, с помощью применения критерия Раусса- Гурвица [2, 5] к системе (10),
определена область устойчивости автожира А-002 (линия 1, рисунок 2) в
сравнении со случаем, не учитывающим изменение w (линия 2), в зависимости от центровки х0
и скорости ![]() =V0 /wR » m. Изменение частоты вращения НВ
приводит к сохранению устойчивости движения до более задних центровок из-за
затрат энергии ЛА на изменение w при возмущении.
=V0 /wR » m. Изменение частоты вращения НВ
приводит к сохранению устойчивости движения до более задних центровок из-за
затрат энергии ЛА на изменение w при возмущении.
Рисунок 2 – Область устойчивости автожира
Приближенно- аналитическое решение переходного
процесса при ступенчатой перекладке НВ на угол Ddв= +1° в ГП на скорости m0 = 0,3
сравнивается с численным (х0 =
250 мм). В данном случае значения частных производных НВ и параметров исходного
режима определены с помощью ИМ. Изменение aр относительно
угла атаки корпуса aк учитывалось
углом отставания Daр(wz) = - 8wz / (gлw0), где gл– массовая характеристика лопасти.
Характеристическое уравнение (11)
имеет вещественный корень р1
= n0 < 0, определяющий сильнозатухающее апериодическое
движение; и комплексно сопряженные корни
р2,3 = n1 ± w1i; р4,5 = n2 ± w2i;
соответственно характеризующие быстрозатухающее короткопериодическое
движение автожира и слабозатухающее длиннопериодическое.
Общее решение
уравнений (10) имеет вид:
DU = A0u![]() +A1u
+A1u![]() ×sin (w1t + ju1) +A2u
×sin (w1t + ju1) +A2u![]() ×sin (w2t +ju2) +DUr, (12)
×sin (w2t +ju2) +DUr, (12)
где UÎ {V, aк, J, w}.
Частное решение системы (10) –
приращения параметров движения DUr после окончания переходного процесса, имеет вид:
DU = Du /D(p); (13)
где Du – определители, полученные из главного определителя D(р) (10) заменой
соответствующих столбцов правыми частями уравнений. Положив в (10) р = 0, получим значения DUr и передаточных функций ![]() (0):
(0):
DUr= ![]() =
= ![]() (0) ×Ddв;
(0) ×Ddв;
DVr= ;
;
![]() (0)=
(0)= ;
;
Daкr =![]() ;
;
Dwr = ;
;
DJr =![]() /g +(с1V /g)×DVr + (
/g +(с1V /g)×DVr + (![]() +g)(Daкr / g) +с1w(Dwr /g). (14)
+g)(Daкr / g) +с1w(Dwr /g). (14)
Используя уравнение связи (5) к выражению (14),
получим
Dqr =
[–![]() + с1V ×
+ с1V ×![]() (0) +
(0) +![]() ×
×![]() (0)+с1w×
(0)+с1w×![]() (0)]×Ddв /g =
(0)]×Ddв /g =![]() (0)×Ddв.
(0)×Ddв.
Постоянные интегрирования найдем из начальных условий, для чего последовательно
четырежды продифференцируем уравнения (12) для
каждого параметра UÎ{V, aк, J, w} при t = 0.
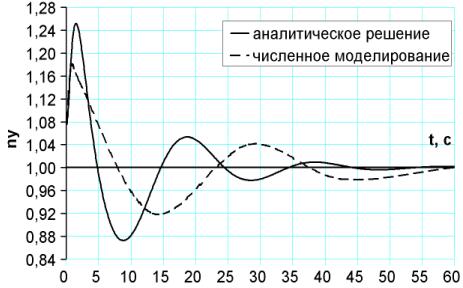
Полученный переходный процесс в сравнении
с результатами моделирования приведен на рисунках 3,
а–в; где нормальная перегрузка определена как ny(t) = 1+![]() ×
×![]() .
.
Аналитическое решение дает качественно правильное описание переходного
процесса. Период колебательного движения автожира, определенный моделированием,
превышает период, полученный аналитически, из-за значительной взаимосвязи продольного и бокового движений.
Длиннопериодическое движение затухает слабо. Полученная аналитическим путем
диаграмма ny
– n, качественно верно отражает ее характерные особенности
[4].
|
Рисунок 3, а –
Изменение скорости |
|
Рисунок
3, б – Изменение перегрузки
Рисунок
3, в – Изменение частоты вращения НВ |
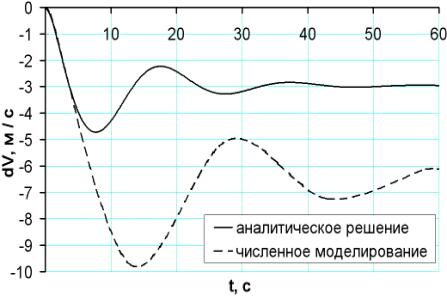
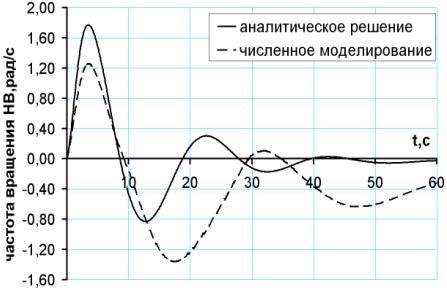
Между аналитическим
решением и численным имеются существенные количественные расхождения,
обусловленные нелинейностью характеристик автожира, не учитываемых
принятыми упрощающими допущениями.
Таким образом,
исследования режимов, характеризующихся быстрым и значительным изменением
параметров полета, целесообразно проводить с помощью математического моделирования,
так как область применения аналитического решения весьма ограничена, а
сложность сопоставима.
Выводы
1) Получены приближенно- аналитические
соотношения возмущенного продольного движения автожира, учитывающие
дополнительную степень свободы – непостоянство частоты вращения НВ
2) Исследованы динамическая устойчивость
автожира и характер переходного процесса при ступенчатой перекладке НВ на малый
угол. Выявлено, что изменение частоты вращения НВ повышает запас устойчивости
автожира и оказывает существенное влияние на его динамику движения.
3) Показано, что исследования режимов
неустановившегося движения автожира при больших изменениях полетных параметров,
целесообразно проводить с помощью численного математического моделирования.
4) Получено значительное количественное
расхождение между численным экспериментом и результатами расчета по
аналитическим соотношениям. Очевидно, приращение изменение угла атаки НВ на 1
градус на скорости 200 км/ч некорректно считать малым. Получено качественное
совпадение. Целесообразна проверка полученных результатов в летном
эксперименте.
Литература
1. Калмыков А.А. Динамические модели автожира и нормирование условий
нагружения конструкции: Автореферат диссертации канд. техн. наук – Казань, 2005
– С.16
2. Лысенко Н.М. Динамика полета. Устойчивость и управляемость ЛА. Вып. I. Издание ВВИА им. проф. Н. Е. Жуковского, 1966 –
С.375
3. Есаулов С.Ю., Бахов О.П., Дмитриев И.С. Вертолет как объект управления.
М.: Машиностроение, 1977 – С.192
4. Калмыков А.А. Реализуемые сочетания перегрузки и раскрутки НВ автожира
// Известия ВУЗов. Авиационная техника, 2004, № 2. С.6-9
5. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования.
Изд-во второе. М.: «Наука», Главная редакция физико-математической литературы,
1972 – С. 767.