Технические науки/11. Робототехника
Д.т.н. Ивель
В.П., к.т.н. Герасимова Ю.В.
Северо-Казахстанский
государственный университет
им.
М.Козыбаева, Казахстан
Адаптивная
система управления многодвигательным электроприводом
Одним из элементов
современных технологий производства, технического обслуживания и ремонта
специализированных грузовых железнодорожных (ЖД) вагонов является возможность
их вращения и подъема на заданный угол и высоту. В частности при производстве
вагонов-зерновозов при сборке полувагона и крыши полувагона необходимо поворачивать
их вокруг горизонтальной оси.
Цель предлагаемой работы
заключается в разработке компьютерной системы управления вращением-подъемом ЖД
вагонов с возможностью адаптации к внешним силовым нестационарным воздействиям
т.е. к переменным моменту инерции и моменту сопротивления, что позволит значительно усовершенствовать
технологический процесс, снизить затраты на производство и ремонт ЖД вагонов.
Известна система управления
многодвигательным электроприводом многосекционных агрегатов [1], которая может
быть использована во взаимосвязанных приводах постоянного и переменного тока
агрегатов по перемещению полосовых материалов. Основной недостаток данной системы – низкая стабильность второго
привода при изменяющихся параметрах объекта. Более совершенной можно считать систему управления
многодвигательным электроприводом многосекционных агрегатов [2].
Принцип работы данной системы основан на использовании дополнительных
блоков, повышающих стабильность работы системы второго привода и обеспечивающих
быстродействие и устойчивость исходной системы привода. Однако и здесь
присутствуют существенные недостатки – невозможность сохранять высокую точность
заданного отклонения угла поворота вала второго привода от угла поворота вала
первого привода и поддерживать оптимальное быстродействие, поскольку в системе
управления отсутствуют датчики измерения угла поворота валов приводов и не
учитывается нестационарность постоянных времени приводов.
С целью устранения описанных недостатков предлагается адаптивная система
управления многодвигательным
электроприводом, основанная на использовании
дополнительных блоков, позволяющих повысить быстродействие системы в переходных
и точность в установившихся режимах.
Система состоит из двух идентичных контуров (рис 1), каждый из которых
включает регулятор скорости (РСк), состоящий из сумматора С и пропорционально-дифференцирующего
звена (ПД), усилителя мощности (УМ), асинхронного электродвигателя (ЭД),
редуктора (Р), рабочего механизма (РМ), дифференциатор (Д) и датчик угловых
перемещений (ДУ). Кроме того, система содержит задачик угловой скорости (ЗСк) и
задатчик углового смещения (ЗУС), интегратор (Инт), идентификатор (Ид) и блок
электронной модели.
Система управления работает следующим образом.
Объектом управления
являются два взаимосвязанных электропривода, первый из которых является
ведущим, а второй ведомым. Скорость вращения валов которых должна сохранять
заданное задатчиком ЗСк значение ωЗД.
Углы поворота φ1 и φ2
валов измеряются датчиками угловых перемещений ДУ1 и ДУ2, преобразуется с
помощью дифференциаторов Дф1 и Дф2 в угловые скорости ω1 и ω2,
которые в узлах суммирования С1 и С2 вычитаются из ωЗД. Отклонения ∆1=
ωЗД – ω1
и ∆2= ωЗД – ω2 поступают на корректирующие пропорционально-дифференцирующие
звенья ПД1 и ПД2 и затем, усиленные силовыми преобразователями УМ1 и УМ2, – на электродвигатели ЭД1 и
ЭД2. Вращение валов электродвигателей через редукторы Р1 и Р2, передается на
рабочие механизмы РМ1 и РМ2, например, валы прокатных станов или механизмы поворота
железнодорожных вагонов.
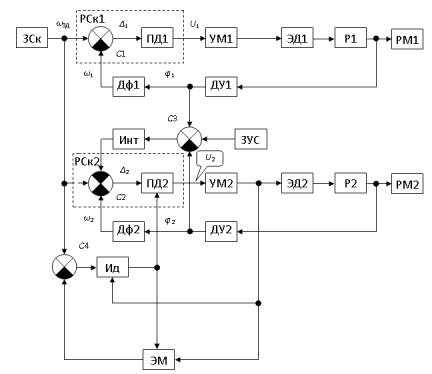
Рисунок
1. Структура адаптивной системы управления
Зависимость между напряжением питания
(выход корректирующего звена) U и скоростью вращения вала
рабочего механизма ω можно представить следующим линеаризованным дифференциальным
уравнением
![]() ,
(1)
,
(1)
где ТЭП – постоянная времени;
k – коэффициент усиления.
С помощью
известных преобразований передаточную функцию электропривода (ЭП) как объекта управления можно представить в следующем
виде:
![]() ,
(2)
,
(2)
где ![]() - оператор
дифференцирования.
- оператор
дифференцирования.
Таким образом, чтобы компенсировать
инерционность привода целесообразно в качестве корректирующего звена выбрать
пропорционально-дифференцирующее звено
с передаточной функцией
![]() , (3)
, (3)
где ТК
выбирается равной ТЭП.
Кроме того, чтобы поддерживать
определенное заданное соотношение φЗД между углами поворота φ1 и φ2
валов ведущего и ведомого привода в систему введен сумматор С3 и задатчик этого
соотношения ЗУС. В случае использования в качестве рабочих механизмов механизмы
поворота
железнодорожных вагонов соотношение φЗД задается равным нулю для устранения перекосов и
дополнительных нагрузок в работе рабочих
механизмов. Сумматор который вычисляет реальную разность в углах
поворота и заданным значением φ1 – φ2 – φЗД.
Затем этот суммарный сигнал с выхода сумматора С3 через интегратор поступает в
качестве обратной отрицательной связи на сумматор С2. Таким образом,
поддерживается высокая точность в регулировании заданного отклонения
угла поворота вала ведомого привода от угла поворота вала ведущего привода.
Однако трудность в поддержании высокого
качества и быстродействия в управлении ведомым приводом заключается в том, что
параметр ТЭП в
формуле (1) заранее неизвестен, может зависеть от многих факторов, не может
быть измерен и в общем случае представляет собой нестационарную величину.
Поэтому в данной системе предусмотрена автоматическая настройка параметра ТК в передаточной функции (3)
по динамическим характеристикам электропривода с помощью их электронных моделей
и блока идентификации [3].
Блок идентификации
описывается уравнением
![]() , (4)
, (4)
где J является
функционалом оптимизации и в данном случае принято
![]() , (5)
, (5)
здесь ε(t) – сигнал рассогласования между выходами ЭП и
эталонной модели ЭП.
Компоненты
градиента функционала (5) определяются по обычному правилу дифференцирования
сложной функции:
![]() . (6)
. (6)
Представим критерий оптимизации (5) в следующем виде
![]() ,
(7)
,
(7)
здесь добавлен множитель 1/2 для удобства дальнейших
преобразований, а черта символически обозначает операцию усреднения во времени.
Уравнение (6) с учетом (7) примет вид
 . (8)
. (8)
Градиентный алгоритм настройки параметра ТК из условия достижения минимума функционала J(ε)
можно представить в следующем скалярном виде:
 (9)
(9)
или
 .
.
Другими
словами, движение к оптимальному значению J производится по градиенту в сторону его оптимального
значения со скоростью, пропорциональной градиенту J.
Определяется
сомножитель ![]() в выражении (9)
следующим образом
в выражении (9)
следующим образом
 (10)
(10)
где ωЭП – выходной сигнал текущей угловой скорости
ЭП, ωМЭП –
выходной сигнал модели ЭП, WМ(p,ТК) – передаточная функция электронной
модели ЭП, UВХ – сигнал на входе ЭП.
Так
как ![]() , то уравнение (10) можно упростить
, то уравнение (10) можно упростить
![]() , (11)
, (11)
где ![]() - вспомогательный
оператор.
- вспомогательный
оператор.
Таким образом, определяя параметр ТК
и используя его в алгоритме настройки передаточной функции
пропорционально-дифференцирующего звена (3), можно с достаточной достоверностью
добиться приближения передаточной функции системы управления к пропорциональному
звену, что, в свою очередь, приведет к оптимальному соотношению точности и
быстродействию системы управления многодвигательным электроприводом.
Литература:
1.
Патент РФ № 2386740, D21F 7/02, опубл. 20.04.2010.
2.
Патент РФ № 2456740, H02P5/00, D21F7/02, опубл. 20.02.2012
3.
Чураков Е.П. Оптимальные и адаптивные системы: Учеб. пособие для
вузов. – М.: Энергоатомиздат, 1987. – 256 с.: ил.