Сніжко Є.М., Заяць П.Ю.
Дніпропетровський національний університет
Модельне-орієнтоване програмування
вимірювальної системи електроімпедансного томографа
Метою роботи є створення методики та програмного забезпечення
вимірювальної системи томографа на основі
32-розрядного мікроконтролера. Електроімпедансна
томографія (ЕІТ) має перспективу стати важливим методом моніторингу внутрішньої
структури у медицині та промисловості, оскільки цей метод є нешкідливим та має
відносно нескладну вимірювальну систему [1]. Також ЕІТ пов’язана із методом
вертикального електричного зондування, який широко використовується у геофізиці. Традиційна вимірювальна частина є досить складною у налагодженні,
оскільки включає багато високоточних компонентів [2,3]. Використання високопродуктивного мікроконтролера ARM дозволяє перекласти значну частину функцій на
програмне забезпечення (рис.1). На рисунку: 1 – об’єкт, 2 – комутатор
електродів, 3 – підсилювач, 4 – генератор струму, 5 – мікроконтролер.
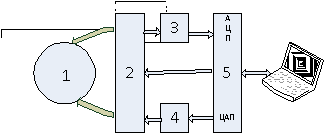
Рис.1.
Структура вимірювальної системи томографа
Для створення
програми мікроконтролера використана методика модельне-орієнтованого
проектування, яка дозволяє суттєво
зменшити час розробки. Замість фізичних прототипів застосовується комп’ютерна модель на всіх етапах розробки. Автоматична генерація
коду для мікроконтролера
забезпечує відсутність помилок ручного кодування, Пакети MATLAB і Simulink забезпечують
системний підхід до моделювання, реалізують компоненти різної фізичної природи, розробку алгоритмів,
аналіз та обробку даних, а допоміжні пакети Real-Time
Workshop і Real-Time Workshop Embedded Coder дозволяють автоматично створювати код для будь-якого мікропроцесора, оскільки вони генерують стандартний код мовою ANSI-C.
Основні
задачі, які виконує мікроконтролер, – це генерація синусоїдального сигналу
різної частоти за допомогою цифро-аналогового перетворювача (ЦАП) та каналу
прямого доступу (КПДП), аналого-цифрове перетворення (АЦП) прийнятого сигналу ,
синхронне детектування, перемикання стимулюючого та вимірювальних електродів,
накопичення вимірювальної інформації. Далі інформація передається на мобільний
пристрій ( ноутбук, планшет, смартфон) для відтворення та візуалізації
внутрішнього розподілу імпедансу з використанням пакету EIDORS. На рис.2 наведена модель програми у пакеті Simulink для плати STM32F4 з мікроконтролером Cortex-M4.
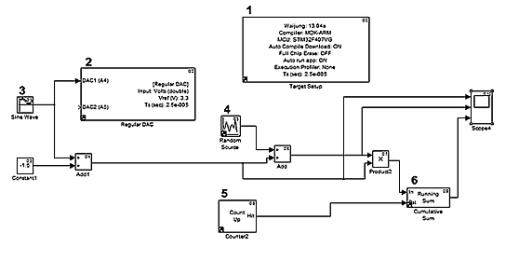
Рис.2. Модель
програми вимірювальної частини
В цій моделі блок 1
виконує налаштування
для конкретного мікроконтролера: вказується тип, встановлюється системний годинник, вибирається
компілятор та команди для нього, час дискретизації. Блок 2 – ЦАП, який приймає дискретні сигнали від блока 3
формування синусоїди. Сигнал, що подається, має частоту 10 кГц, один період поділений на 40 значень. Для реальної
симуляції синхронного
детектування
вводиться генератор шуму 4, вихід якого додається до вимірювального сигналу. Потім зашумлений
сигнал перемножується із опорним сигналом, і цей добуток сумується та накопичується за допомогою блоку 6 (Cumulative Sum). Для контролю кількості циклів синусоїди для синхронного детектування використовується лічильник 5.
На рис.3 зображена згенерована за
допомогою ЦАП синусоїда,
(зверху), її зашумлений вид (посередині) та результат синхронного детектування (знизу). В
прикладі можна побачити, що синхронне детектування ведеться за п’ятьма циклами
синусоїди.
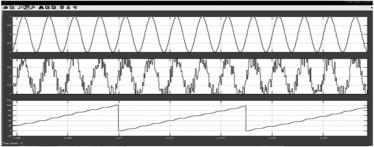
Рис.3.
Сигнали в моделі вимірювальної системи
Аналогічно побудовані моделі перемикання електродів, та передачі даних
через порт USB. Після моделювання у різних
режимах був отриманий код програми, На
мобільному пристрої програма візуалізації виконується у математичному пакеті Octave. Сумісна робота вимірювальної
системи із системою відтворення та візуалізації показала працездатність
отриманої програми.
Висновки та подальші перспективи досягнень
Використання сучасних
мікроконтролерів у импедансному томографі дозволяє спростити апаратну частину
за рахунок більш складної програми. Модельне-орієнтоване програмування зменшує
час розробки та тривалість відладки системи. У подальшому планується
реалізувати багато частотний режим роботи,
що підвищить точність відтворення розподілу провідності всередині
об’єктів.
Список літератури
1.Electrical impedance tomography
Ed. by D.S.Holder IOP Publ. 2005, 464 pp.
2.Edic P.M., Saulnier G. J.,
Newell G.C., Isaacson D. A real-time electrical impedance tomograph IEEE
Tranc.Biomed.Eng. 1995, 42(9), p.849-859
3.Корженевский А.В., Корниенко В.Н. Электроимпедансный компьютерный томограф для медицинских приложений, ПТЭ, 1997, №3, стр.133-140