Д.т.н. Филонин
О.В., студент Николаев П.Н., аспирант Талызин Ю.Б.
Самарский
государственный аэрокосмический университет
имени
академика С.П. Королёва, Россия
Магнитоиндукционные эжекторы для прецизионного
запуска на заданную орбиту мини
и наноспутников
Одним из перспективных направлений
применения малых спутников с массами от 1 до 10 кг, доставляемых на некоторую
орбиту как попутный груз, является исследование планетарных атмосфер с помощью методов и средств обратных
некорректных задач [1] радоновского типа. Для
решения задач такого рода, на почти круговую орбиту, необходимо очень точно,
через определённые интервалы времени, в точно заданных направлениях, запустить
группировки миниспутников в количестве от 12 до 24, имеющих массу каждого
аппарата порядка 10 кг. Каждый такой спутник, содержит: миниатюрный гироскоп,
многопроцессорный блок для текущих вычислений орбитальных данных и параметров
реконструкций, модули связи, лазерный дальномер, устройство для импульсного
лазерного зондирования атмосферного слоя, приемо-передающий СВЧ-блок для
радиозондирования, ионные или плазменные микродвигатели ориентации (ДО), солнечные
панели и аккумуляторы, а также другие модули, в зависимости от особенностей
конкретных решаемых задач.
Одним из сложных моментов в организации
такой орбитальной группировки является прецизионный запуск спутников на
заданную орбиту, так как именно от параметров орбиты, местоположения на ней
спутников, их ориентации зависит точность процедур реконструкции исследуемых
параметров атмосферы. Для решения данного рода задач автором [2] предложен довольно эффективный, обладающий малой массой, магнитоиндукционный
эжектор. Здесь надо отметить, что такая система запуска вполне эффективна для
вывода на орбиты наноспутников, для которых критерии ориентации аппарата, его
местоположение и т.д., на орбите не так важны, как в рассматриваемом случае.
 Авторами разработана магнитоиндукционная
система запуска мини-спутников (МС), позволяющая решать поставленные задачи. За
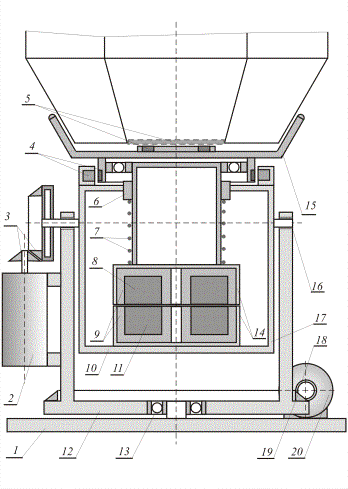
основу взята схема предложенная автором [2], её эскиз представлен на рис. 1. Устройство состоит из двух идентичных
сильноточных катушек – 8, помещенных в ферритовые броневые сердечники – 9, их принято
называть индукторами. Они расположены соосно по отношению друг к другу.
Сердечники с катушками запрессованы в тонкостенные корпуса, которые дополнительно,
выполняют ещё и роль экранов. Одна из катушек закреплена неподвижно относительно
корпуса – 12, другая может перемещаться вдоль их общей оси. Подвижная катушка
перемещается в пределах (0÷1, 0÷2) см, относительно неподвижной
катушки, соосность обеспечивается направляющим механизмом – 6. В исходном
состоянии катушки должны быть достаточно плотно прижаты друг к другу. Это
обеспечивается с помощью поджимной пружины – 7, которая, в момент запуска играет
роль демпфера. Параметры сердечников и катушек выбираются в зависимости от
массы запускаемого объекта, его начальной скорости. Для МС с массами порядка 10
кг, катушки, например, содержат по 48 витков медного провода диаметром 1,2 мм,
и помешены в броневые сердечники из феррита (НЦ 2000) имеющих внешний диаметр ~52 мм. Для создания импульсного магнитного поля,
которое является в данном случае «рабочим телом» системы, используются
конденсаторы 10 000 мкф, с рабочим напряжением 100 В. Каждый такой конденсатор
способен запасти до 50 Дж энергии. Если конденсаторы, теперь разрядить на
катушки, которые необходимо, при этом, включить встречно, то за счёт импульсов
электромагнитных полей, сформированных каждой катушкой, подвижная катушка
получит соответствующий механический импульс
Авторами разработана магнитоиндукционная
система запуска мини-спутников (МС), позволяющая решать поставленные задачи. За
основу взята схема предложенная автором [2], её эскиз представлен на рис. 1. Устройство состоит из двух идентичных
сильноточных катушек – 8, помещенных в ферритовые броневые сердечники – 9, их принято
называть индукторами. Они расположены соосно по отношению друг к другу.
Сердечники с катушками запрессованы в тонкостенные корпуса, которые дополнительно,
выполняют ещё и роль экранов. Одна из катушек закреплена неподвижно относительно
корпуса – 12, другая может перемещаться вдоль их общей оси. Подвижная катушка
перемещается в пределах (0÷1, 0÷2) см, относительно неподвижной
катушки, соосность обеспечивается направляющим механизмом – 6. В исходном
состоянии катушки должны быть достаточно плотно прижаты друг к другу. Это
обеспечивается с помощью поджимной пружины – 7, которая, в момент запуска играет
роль демпфера. Параметры сердечников и катушек выбираются в зависимости от
массы запускаемого объекта, его начальной скорости. Для МС с массами порядка 10
кг, катушки, например, содержат по 48 витков медного провода диаметром 1,2 мм,
и помешены в броневые сердечники из феррита (НЦ 2000) имеющих внешний диаметр ~52 мм. Для создания импульсного магнитного поля,
которое является в данном случае «рабочим телом» системы, используются
конденсаторы 10 000 мкф, с рабочим напряжением 100 В. Каждый такой конденсатор
способен запасти до 50 Дж энергии. Если конденсаторы, теперь разрядить на
катушки, которые необходимо, при этом, включить встречно, то за счёт импульсов
электромагнитных полей, сформированных каждой катушкой, подвижная катушка
получит соответствующий механический импульс
![]() .
.
Соответствующий импульс, с учётом механических потерь, приобретёт и
запускаемый аппарат, нижняя часть которого – 5 была установлена на стартовом
столе с помощью направляющих – 15 эжектора. Отметим, что для миниспутников,
ориентированных на задачи томографической реконструкции параметров атмосферы
важными параметрами является распределение массы спутника относительно центра
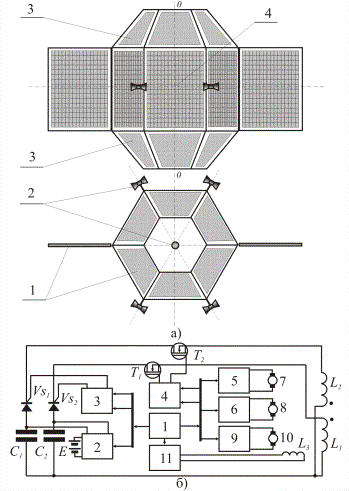
масс и заданной оси проходящей через центр масс. Наиболее просто такую задачу
можно решить, если выполнить спутник в виде правильного шестигранника,
основаниями которого являются также правильные шестиугольные усечённые пирамиды
см. рис. 2 а). Действительно при таком выборе конфигурации миниспутника
довольно просто определить главную его ось – 00, проходящую через центр масс –
4, где находится гироскоп, эффективно расположить двигатели ориентации – 2.
Кроме того, с одной стороны упрощается расположение солнечных панелей – 3, повышается
их эффективность за счёт ориентации, с другой стороны приёмопередающие антенны
оптического и радиодиапазона компактно размещаются в «пространстве» усечённых
пирамид – это их транспортное положение. Другим немаловажным обстоятельством,
предложенной конфигурации МС является относительная простота равномерного
распределения компонент аппарата – электронных плат, аккумуляторов антенных
модулей и пр. относительно главной оси 00.
Для запуска МС в заданном направлении, т.е. при определённых значениях
углов ![]() , относительно текущей ориентации платформы -1 средства
доставки (см. рис.1), (её ориентация в пространстве определяется пространственным
положением системы выведения) служат электромеханические системы, состоящие из
двигателей приводов – 3, 18.
, относительно текущей ориентации платформы -1 средства
доставки (см. рис.1), (её ориентация в пространстве определяется пространственным
положением системы выведения) служат электромеханические системы, состоящие из
двигателей приводов – 3, 18.
Система привода – 3, состоящая из конического редуктора и собственно
двигателя привода обеспечивает необходимое значение угла ![]() , разворачивая систему запуска относительно оси – 16. С
помощью конической передачи – 19 и двигателя – 18 система запуска
разворачивается относительно оси системы, в соответствие с выбранным значением
угла
, разворачивая систему запуска относительно оси – 16. С
помощью конической передачи – 19 и двигателя – 18 система запуска
разворачивается относительно оси системы, в соответствие с выбранным значением
угла ![]() .
.
 Отличительной
особенностью рассматриваемой системы запуска, от магнитоиндукционных эжекторов,
предназначенных для запуска наноспутников, является возможность сообщать
запускаемому аппарату начальный момент импульса, вектор которого коллиниарен
оси 00 и моменту импульса гироскопа. В данном устройстве это реализовано следующим
образом. После того как манипулятор поместил данный спутник в ответную часть –
15 эжектора, его ось оказывается коллинеарной с осью спутника и вектором
момента импульса гироскопа, который к этому моменту времени должен быть
раскручен. Это обеспечивается с помощью электромагнита – 5 и ферромагнитной
насадки закреплённой на нижнем основании МС. Электромагнит, индуктивность катушки
которого -
Отличительной
особенностью рассматриваемой системы запуска, от магнитоиндукционных эжекторов,
предназначенных для запуска наноспутников, является возможность сообщать
запускаемому аппарату начальный момент импульса, вектор которого коллиниарен
оси 00 и моменту импульса гироскопа. В данном устройстве это реализовано следующим
образом. После того как манипулятор поместил данный спутник в ответную часть –
15 эжектора, его ось оказывается коллинеарной с осью спутника и вектором
момента импульса гироскопа, который к этому моменту времени должен быть
раскручен. Это обеспечивается с помощью электромагнита – 5 и ферромагнитной
насадки закреплённой на нижнем основании МС. Электромагнит, индуктивность катушки
которого - ![]() включается и
отключается с помощью электронного ключа по командам микропроцессорного блока
управления – 1 (см. рис. 2 б). Такой подход даёт возможность жёстко зафиксировать
направление оси МС относительно средства доставки и выбрать практически любые
углы
включается и
отключается с помощью электронного ключа по командам микропроцессорного блока
управления – 1 (см. рис. 2 б). Такой подход даёт возможность жёстко зафиксировать
направление оси МС относительно средства доставки и выбрать практически любые
углы ![]() для точного
запуска в заданном направлении. Для сообщения импульса вращательного движения
МС относительно оси 00, служит электромагнитный шаговый привод – 4 (рис. 1), подключённый
к блоку управления - 9 который по командам микропроцессора вырабатывает серии
сдвинутых по времени импульсов управления – аналог шагового двигателя. В
зависимости от условий и особенностей запуска с помощью такого шагового привода
– 10 (рис. 2) задаётся начальный момент импульса МС.
для точного
запуска в заданном направлении. Для сообщения импульса вращательного движения
МС относительно оси 00, служит электромагнитный шаговый привод – 4 (рис. 1), подключённый
к блоку управления - 9 который по командам микропроцессора вырабатывает серии
сдвинутых по времени импульсов управления – аналог шагового двигателя. В
зависимости от условий и особенностей запуска с помощью такого шагового привода
– 10 (рис. 2) задаётся начальный момент импульса МС.
Электродвигатели приводов – 2, 20 (рис. 1) управляются с помощью того
же микропроцессорного блока, обобщённая схема которого изображена на рис. 2 б).
Данный блок содержит микроконтроллер – 1, с подготовленными заранее данными,
контроллер заряда конденсаторов – 2, блок управления сильноточными тиристорами
– 3, блок управления полевыми транзисторами - 4, системы управления – 5, 6
электродвигателями – 7, 8.
Особенностями данной системы управления процессами разряда конденсаторов
являются:
·
Тиристоры в данном
случае выполняют двойную роль – разрешают процессы разряда конденсаторов и
отключают индукторы на время их заряда от внутреннего источника или солнечной
панели.
·
Регулируя степень
открытия полевых транзисторов можно изменять величину энергии накапливаемой в
индукторах, что в свою очередь позволяет изменять величину импульса запуска
отделяемого аппарата.
·
Так как броневые
сердечники находятся в замкнутом состоянии очень малое время порядка несколько
микросекунд, то транзисторы должны открываться строго синхронно.
В заключении отметим, что описанная система запуска имеет габариты порядка
6 дм3, массу примерно 10 кг, энергии запасаемой в конденсаторах и преобразованной
в индукторах различных типов хватает для сообщения спутнику массой в 10 кг приобретать
скорость 0,5 м/с.
Литература
1.
Филонин О.В., Талызин Ю.Б. Математическое моделирование
процессов исследования планетарных атмосфер с помощью колоний малых спутников, Материалы
3-й Всероссийской н-т конф. «Актуальные проблемы ракетно космической техники»
(3 Козловские чтения), Самара, 2013, с. 367 – 371.
2.
Филонин О.В. Магнито-индукционные эжекторы для запуска
микро- и наноспутников, Сб. трудов “5 - th International
scientific conference ORT
Publishing “European Applied
Sciences” 2013, Stuttgart, Germany, p. 88 –
90.