Голубин C. А., к. т. н Ломанов А. Н.,
к. т. н Никитин
В. С., к. т. н Комаров В. М., д. т. н. Семенов Э. И.
Рыбинский
государственный авиационный технический университет им.
П. А. Соловьева, ООО «НПП «Тензосенсор»
Экспериментальное исследование характеристик
оптических министиков с общим излучателем
Для управления робототехникой и сложными
манипуляторами широко используются министики, представляющие собой
двухкоординатные миниджойстики размером порядка 15-20 мм. Отличие министиков от
джойстиков заключается в их управлении пальцами руки, которые намного быстрее и
точнее позволяют формировать управляющие воздействия. Например, движения пальцами
в 5-7 раз быстрее, чем движения кисти руки. Малые размеры министиков позволяют размещать до пяти министиков на одной ручке управления,
что значительно облегчает управление объектами с большим количеством степеней
свободы. Например, в полиджойстиках, разработанных компанией «НПП «Тензосенсор»
с участием специалистов кафедры Вычислительных систем РГАТУ им. П.А. Соловьева,
используется 10 министиков, которые позволяют управлять объектами имеющими до
20-ти степеней свободы. Это очень высокий показатель функциональности, значительно
превосходящий лучшие средства управления робототехникой и авионикой на основе
джойстиков.
Большинство применяемых министиков построены на
резистивном принципе: отклонение ручки министика вызывает изменение
сопротивления чувствительных элементов. В качестве чувствительных элементов
используются переменные резисторы. Такие министики содержат много деталей, а их
характеристики быстро изменяются из-за истирания резистивного слоя.
Компанией Austria Microsystems производится министик EasyPoint EP40-101, действие
которого основано на использовании эффекта Холла. Министик имеет высокую линейность
передаточной функции, ресурс в 1 млн. отклонений в каждом направлении. Технология
производства министиков на эффекте Холла достаточно сложна и в России не
освоена.
В ООО «НПП «Тензосенсор» с участием
специалистов кафедры Вычислительных систем РГАТУ им. П.А. Соловьева был
разработан резистивный министик МД-14 на основе полимерного
упругодеформируемого элемента с резистивным покрытием. Действие министика
основано на деформации полимерного элемента и чувствительного резистивного
покрытия, нанесенного на его поверхность. Такие министики имеют минимальное
количество деталей (всего 2 – плата и упругодеформируемый резистивный элемент),
однако ресурс таких министиков оказался недостаточно высок (200-300 тысяч
нажатий).
Внешний вид министиков представлен на рисунке 1.

а)

б)

в)
Рисунок 1- количество детателей министиков
а) министик компании Sony, б) резистивный министик китайской
компании Tenzos, в) резистивный министик на основе упругодеформируемого
элемента компании «НПП «Тензосенсор»
Чтобы повысить эксплуатационный ресурс
министиков на основе упругодеформируемых элементов, сохранив их лучшие качества,
ООО «НПП «Тензосенсор» в 2013 году была разработана конструкция оптического
министика.
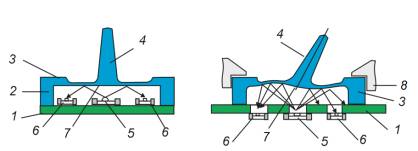
Рисунок 2 – Принципиальная схема
оптического министика: 1 – печатная плата;
2 – корпус; 3 – упругодеформируемый
элемент; 4 – управляющая рукоятка; 5 – источник света (светодиод); 6 –
фотоэлектрический преобразователь (фотодиод); 7 – светоотражающая поверхность; 8
– фиксирующие элементы корпусных деталей.
На рисунке 2 показана принципиальная схема оптического
министика, который состоит из размещенного на плате 1 корпуса 2 и
упругодеформируемого элемента 3, выполненного за одно целое с управляющей рукояткой 4. На плате 1 под упругодеформируемым элементом 3 расположены источник света
(светодиод) 5, и не менее одного приемника света (фотодиода) 6, которые соединены
с микропроцессором 7 шинами и средствами передачи данных 8. Упругодеформируемый элемент 3 в виде детали из эластичного полимерного
материала, содержит светоотражающую или светопоглощающую поверхность 7,
расположенную над источником света 5 и фотоэлектрическими преобразователями
6. Упругодеформируемый элемент выполнен из эластичного
материала в виде пластины с управляющей рукояткой 4 опирающейся на элементы
корпуса 2 оптического миниджойстика, прикрепленного к плате 1.
Принцип работы
оптического министика заключается в эффекте отражения света от светоотражающей
поверхности полимерного упругодеформируемого элемента (УДЭ), который
деформируется рукояткой в зависимости от направления и величины нажатия.
Оптический министик сохранил
свои основные преимущества: простоту конструкции, технологичность в массовом
производстве, приобретя высокую надежность вследствие отсутствия механически
контактирующих и деформируемых резистивных элементов. Министик обладает бесшумностью,
пожаро- и взрывобезопасностью, травмобезопасностью, малым весом и многофункциональностью
(возможностью перепрограммирования выполняемых функций).
Для исследования зависимости сигналов министика
от величины линейного отклонения
рукоятки и угла поворота министика (передаточной функции) была разработана экспериментальная установка, блок-схема
которой представлена на рисунке 3.
Рисунок
3 – Блок-схема экспериментальной установки
Экспериментальная установка для исследования
передаточной функции министика, показана на рисунке 3 и состоит из следующих
элементов: механизм перемещения по оси X, механизм перемещения по оси Y,
механизм поворота, цифровая камера, блок сопряжения министика с ПК,
персональный компьютер с программным обеспечением для снятия показаний
министика.
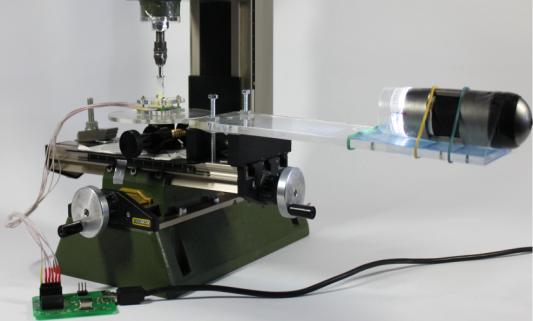
Министик 2 закреплен в центре поворотной
платформы 3, позволяющей вращать министик относительно его центра при помощи
механизма поворота 4. Управляющая рукоятка министика свободным концом
закреплена в держателе 1. Платформа снабжена механизмами перемещения по оси
X 5 и по оси Y 7, позволяющими отклонять рукоятку министика от центра. Фотографии
экспериментальной установки представлены на рисунке 4.
![]()


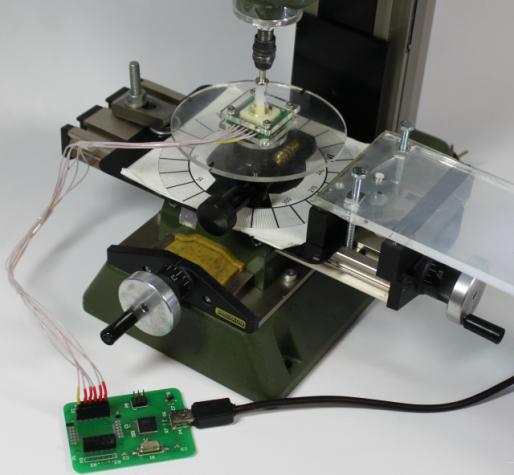
Рисунок 4 – Экспериментальная установка: 1 – держатель
рукоятки министика, 2 – министик, 3 – поворотная платформа, 4 – механизм
поворота, 5 – механизм перемещения по оси X,
6 – блок сопряжения министика с ПК, 7 – механизм перемещения по оси Y, 8 – цифровая камера,
Отклонение
рукоятки министика по оси X
контролируется с помощью цифровой камеры Dino-Lite AD413TL-MA1, передающей изображение на ПК, и
программы DinoCapture v2.0. При перемещении министика по оси X камера перемещается вместе с ним. Измерение
отклонения рукоятки министика производится визуально при помощи экранной
линейки. Программа представлена на рисунке 5.
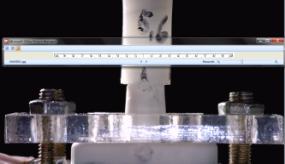

Рисунок 5 – Вид
министика в различных положениях (изображение получено с помощью видеокамеры Dino-Lite и программы DinoCapture)
Получение
показаний министика осуществляется при помощи программы «1 Joy Test Registrator». Программа соединяется с блоком сопряжения министика
по протоколу USB и автоматически с
интервалом в 10 миллисекунд получает показания фотоэлектрических преобразователей
министика, которые отображаются в левой части окна. Программа позволяет
производить регистрацию показаний по нажатию кнопки пользователем, регистрация
производится однократно или многократно (до 10 замеров) с настраиваемым интервалом
от 0,1 секунды до 10 секунд. Полученные показания отображаются в табличном виде
в правой части окна программы. Программа позволяет скопировать таблицу
результатов или ее часть в буфер обмена для последующей вставки в пакет Microsoft Excel с сохранением разбивки по
строкам и столбцам.
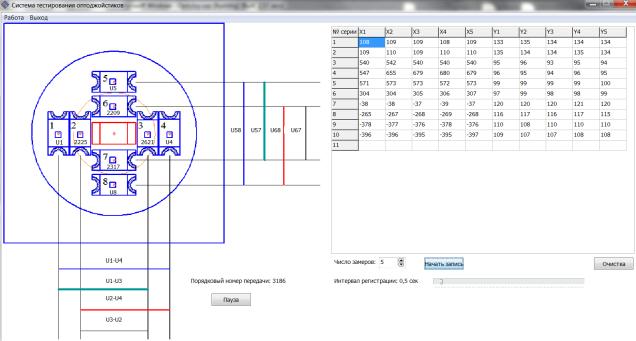
Рисунок 6 – Скриншот программы регистрации параметров
1 Joy Test Registrator
Целью эксперимента является определение
зависимости показаний полезного сигнала министика от величины отклонения
рукоятки министика при различных углах поворота корпуса министика.
Теоретические графики зависимостей идеального
министика представлены на рисунке 7. В ходе эксперимента было установлено,
насколько зависимость полезного сигнала исследуемого министика соответствует
теоретическим представлениям.
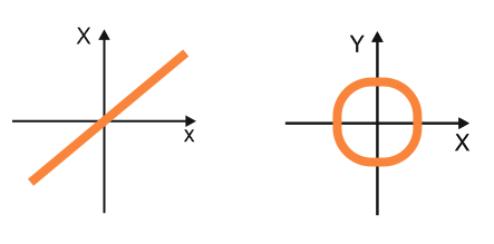
Рисунок 7 – Графики зависимостей идеального министика: передаточная
функция – зависимость показаний X от
отклонения рукоятки x (слева);
лепестковая диаграмма зависимости показаний X
и Y от угла поворота (справа)
Качество полезного сигнала реального министика оценивается
по показателям:
-
точность
– разброс показаний при определенном отклонении рукоятки;
-
нелинейность
– отклонение кривой передаточной функции исследуемого министика от прямой
линии;
-
гистерезис
– различие выходного сигнала при одинаковом значении отклонения рукоятки, но
разных направлениях его изменения.
В ходе эксперимента были произведены следующие замеры
показаний X и Y министика:
-
измерение
показаний при постоянном угле поворота министика и изменяемом отклонении
рукоятки;
-
измерение
показаний при постоянном отклонении рукоятки министика и изменяемом угле
поворота.
Измерение показаний при постоянном угле поворота
министика и изменяемом отклонении рукоятки было проведено в следующих условиях:
-
пределы
отклонения рукоятки министика от центра: –5..+5 мм;
-
направление
отклонения: влево (от +5 мм до –5 мм), вправо (от –5 мм до +5 мм);
-
угол
поворота министика: 0°, 45°, 90°;
-
число
итераций замера показаний: 5, с последующим усреднением полученных значений.
На рисунке 8 представлены результаты измерений
для угла поворота министика 0°, на рисунке 9 – для угла поворота министика 90°,
на рисунках 10 и 11 – для угла поворота министика 45°.
Рисунок 8 – Результаты измерений для
угла поворота министика 0°
(координата Х)
Рисунок 9 – Результаты измерений для
угла поворота министика 90°
(координата Y)
Рисунок 10 – Результаты измерений
для угла поворота министика 45°
(координата X)
Рисунок 11 – Результаты измерений
для угла поворота министика 45°
(координата Y)
Для оценки точности показаний применяется значение
среднеквадратического отклонения измеренных при итерациях показаний в точке с заданным
отклонением рукоятки. Относительное значение δ вычислялось по формуле
|
δ =|СКО/ ΔX
|, |
(1) |
где ΔX – диапазон значений
передаточной функции.
Для оценки нелинейности при помощи метода
наименьших квадратов (функция ЛИНЕЙН() пакета MS Excel) строится аппроксимирующая функция прямой линии вида
X=kx+b. Далее нелинейность NL вычисляется по формуле
|
NL =|X–Xрасч|/ΔX, |
(2) |
где Х – фактическое значение координаты в данной
точке;
Храсч –
вычисленное при помощи аппроксимирующей функции;
ΔX –
диапазон значений передаточной функции.
Гистерезис G показаний оценивается по
формуле:
|
G=|Xпр-Xл|/
ΔX, |
(3) |
где Xпр – значение параметра
в данной точке при перемещении рукоятки вправо;
Xл – при перемещении
влево;
ΔX –
диапазон значений.
Результаты расчетов представлены в таблице 1.
Таблица 1 – Параметры качества сигнала
исследуемого министика
|
Показатель |
Угол 0°, координата X |
Угол 90°, координата Y |
Угол 45°, координата X |
Угол 45°, координата Y |
|
Диапазон
значений |
1188 |
965 |
1069 |
791 |
|
Макс.
отклонение |
2,13% |
5,27% |
13,78% |
254,95% |
|
Макс.
нелинейность |
15,31% |
15,13% |
17,10% |
16,37% |
|
Макс.
гистерезис |
7,71% |
8,96% |
7,32% |
10,50% |
Измерение показаний при постоянном отклонении
рукоятки министика и изменяемом угле поворота было проведено в следующих
условиях:
-
угол
поворота министика: 0°..360° с шагом 30°;
-
направление
вращения: по часовой стрелке (0°..360°), против часовой стрелки (360°..0°);
-
отклонение
рукоятки министика от центра: 1,5 мм; 3 мм; 4,5 мм;
-
число
итераций замера показаний: 5, с последующим усреднением полученных значений.
На рисунке 12 представлены результаты измерений
в виде лепестковой диаграммы. По результатам измерений была построена
трехмерная поверхностная диаграмма зависимости показаний X и Y от угла и величины отклонения
рукоятки, отображенная на рисунке 13.
Рисунок 12 – Результаты измерений
показаний министика при его вращении с постоянным значением отклонения рукоятки
Рисунок 13 – Трехмерная
поверхностная диаграмма зависимости показаний министика от отклонения рукоятки
Выводы:
1. Разработанная схема оптического
министика на основе упругодеформируемого элемента позволяет создавать
работоспособные и высокоэффективные министики.
2. Максимальный диапазон
отклонения рукоятки министика составляет +/-5.0 мм, что укладывается в
оптимальный диапазон амплитуд отклонения пальцев руки порядка 12-20 мм.
3. Передаточная функция исследованного
оптического министика линейна и симметрична в диапазоне отклонения рукоятки в
пределах –1..+1 мм. При больших отклонениях
кривые показаний приобретают экспоненциальную форму.
4. Мертвая зона министика
не превышает 0.5 мм по всем координатам.
5. Максимальная величина
гистерезиса составляет 10,50% диапазона значении передаточной функции. Максимальный
гистерезис наблюдается при угле поворота министика 45°.
Таким
образом, передаточная функция оптического министика соответствует основным требованиям, предъявляемым к
средствам управления сложной робототехникой, манипуляторами и летательными
аппаратами. Конструкция министика требует доработки с целью повышения точности,
снижения нелинейности и гистерезиса показаний.
Прикладные научные
исследования и экспериментальные разработки проведены при финансовой поддержке
государства в лице Минобрнауки России. Уникальный идентификатор прикладных
научных исследований и экспериментальных разработок RFMEFI57914X0087.