Голубин C. А., к. т. н Ломанов А. Н.,
к. т. н Никитин
В. С., к. т. н Комаров В. М.
Рыбинский государственный
авиационный технический университет им. П. А. Соловьева, ООО «НПП
«Тензосенсор»
Экспериментальное
исследование характеристик
оптических министиков
с общим приемником
Для управления объектами авиации, робототехники,
сложными манипуляторами, портативными электронными устройствами, при трехмерном
моделировании и в видеоиграх применяются различные устройства ввода: клавиатуры,
мыши, джойстики, трекболы, сенсорные панели и экраны. Одним из устройств ввода
являются министики – двухкоординатные микроджойстики. Отличие министиков от
джойстиков заключается в их управлении пальцами руки, что позволяет оператору
при помощи нескольких министиков управлять объектами с большим количеством
степеней свободы.
Большинство применяемых министиков построены на
резистивном принципе: отклонение ручки министика вызывает изменение
сопротивления чувствительных элементов. В качестве чувствительных элементов
используются переменные резисторы либо резистивные полосы. Такие министики
сложны в производстве, содержат много деталей (свыше 10). Характеристики
министиков в процессе эксплуатации заметно изменяются из-за истирания
резистивного слоя.
В ООО «НПП «Тензосенсор» был разработан
резистивный министик МД-14 на основе полимерного упругодеформируемого
элемента с резистивным покрытием. Данный министик имеет малое количество
деталей, однако ресурс данного министика недостаточно высок (200-300 тысяч нажатий).
Существует также министик EasyPoint EP40-101
компании Austria Microsystems,
действие которого основано на использовании эффекта Холла. Министик имеет
высокую линейность характеристики, ресурс в 1 млн. отклонений в каждом
направлении, но высокую цену, затрудняющую массовое применение данных
устройств.
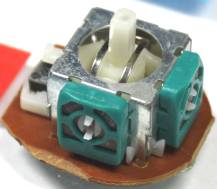
Внешний вид министиков представлен на рисунке 1
б) а)

в) г)
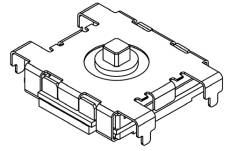


Рисунок 1 –Министики: а – на основе переменных резисторов, б
– на основе резистивных полос, в – EasyPoint
EP40-101, г – МД-14 на основе полимерного упругодеформируемого элемента.
В ООО «НПП «Тензосенсор» разработана
конструкция оптического министика. По сравнению с существующими разработанный
министик имеет следующие преимущества: простота конструкции, технологичность в
массовом производстве, высокая надежность вследствие отсутствия трущихся
частей, низкая цена (менее 1$), бесшумность, пожаро- и взрывобезопасность,
травмобезопасность, малый вес, многофункциональность (возможность перепрограммирования).
Схема оптического министика приведена на рисунке
2.
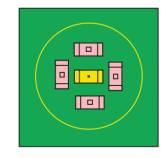

Рисунок 2 – Принципиальная схема
оптического министика: 1 – печатная плата;
2 – корпус; 3 – управляющая рукоятка; 4 –
упругодеформируемый элемент, 5 – светоотражающая поверхность, 6 – фотоэлектрический преобразователь (фотодиод,
фоторезистор); 7 – источник света (светодиод, лазер).
На рисунке 1 показана принципиальная схема оптического
министика, который состоит из размещенного на плате 1 корпуса 2 и
упругодеформируемого элемента 4, выполненного за одно целое с управляющей
рукояткой 3. На плате 1 под упругодеформируемым элементом 4 расположены приемник
света (фотодиод, фоторезистор) 6, и не менее одного источника света (светодиода,
лазера) 7, которые соединены с микропроцессором. Упругодеформируемый
элемент 4 в виде детали из эластичного полимерного материала, содержит светоотражающую
или светопоглощающую поверхность 5, расположенную над источником света 6 и
фотоэлектрическими преобразователями 7.
Упругодеформируемый
элемент выполнен из эластичного материала в виде пластины с управляющей
рукояткой 3 опирающейся на элементы корпуса 2 оптического министика,
прикрепленного к плате 1.
Принцип работы
оптического министика заключается в эффекте отражения световой волны от
светоотражающей поверхности полимерного упругодеформируемого элемента (УДЭ),
который деформируется рукояткой в зависимости от направления нажатия и, таким
образом, модулирует распределение светового потока от источника света к
приемникам света.
Для исследования зависимости сигналов
министика от величины линейного отклонения рукоятки и угла поворота министика
(передаточной функции) была разработана
экспериментальная установка. Блок-схема установки представлена на рисунке 3.
Рисунок
3 – Блок-схема экспериментальной установки
Министик
закреплен в центре поворотной платформы, позволяющей вращать министик
относительно его центра. Управляющая рукоятка министика свободным концом закреплена
в держателе. Платформа снабжена механизмами перемещения по осям X и Y, позволяющими
отклонять рукоятку министика от центра.
Фотографии
экспериментальной установки представлены на рисунке 4.
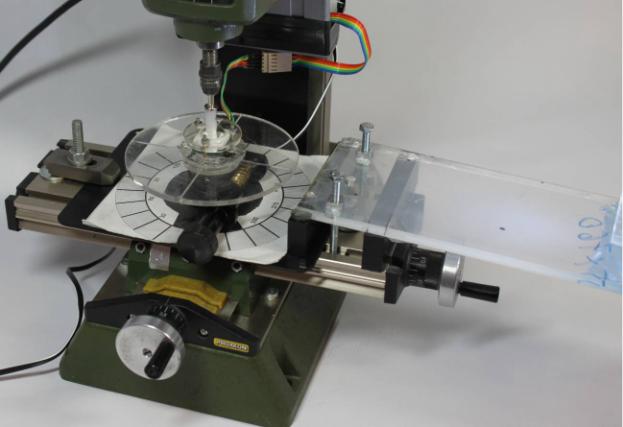
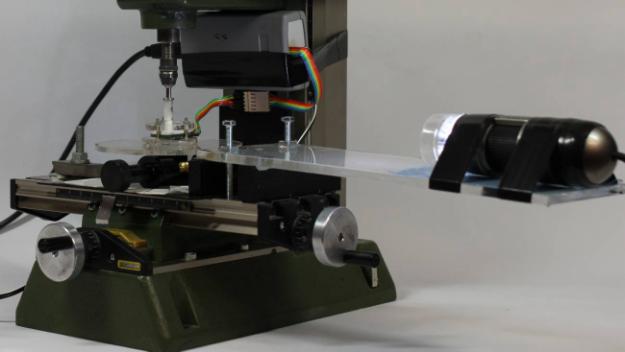
Рисунок 4 – Фотографии экспериментальной установки: 1 –
держатель рукоятки министика, 2 – министик, 3 – поворотная платформа, 4 –
механизм поворота, 5 – механизм перемещения по оси X, 6 – механизм перемещения
по оси Y, 7 – цифровая камера, 8 – блок сопряжения министика с ПК
Отклонение
рукоятки министика по оси X контролируется с
помощью цифровой камеры Dino-Lite AD413TL-MA1, передающей изображение на ПК, и
программы DinoCapture v2.0. При перемещении министика по оси X
камера перемещается вместе с ним. Измерение отклонения рукоятки министика
производится визуально при помощи экранной линейки. Программа представлена на рисунке
5.
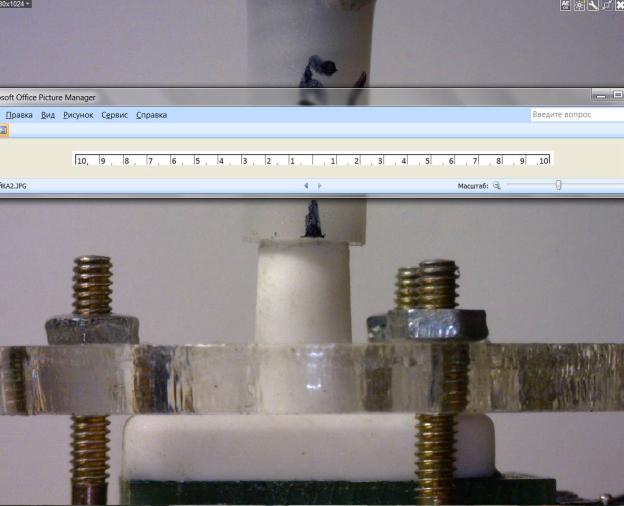
Рисунок 5 – Программа DinoCapture
Получение
показаний министика осуществляется при помощи программы KalibratorGUI. Программа позволяет регистрировать показания
министика в ручном (рисунок 6) и автоматическом (рисунок 7) режимах. В ручном
режиме программа получает показания министика по нажатию пользователем кнопки.
Программа осуществляет запрос однократно или многократно (до 10 итераций) с
интервалом, настраиваемым в диапазоне от 0,1 до 10 секунд. Запрос показаний может
быть выполнен с задержкой от 1 секунды до 5 минут. Полученные показания
программа может сохранять в файл формата *.csv. В автоматическом режиме программа регулярно
опрашивает министик с интервалом от 0,1 до 10 секунд, с возможностью
автоматического сохранения показаний в файл.
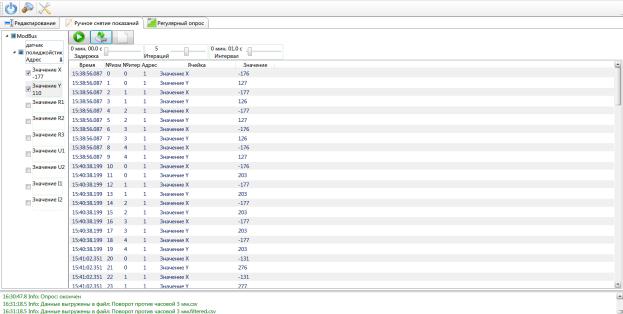
Рисунок 6 – Программа KalibratorGUI в режиме ручного снятия
показаний
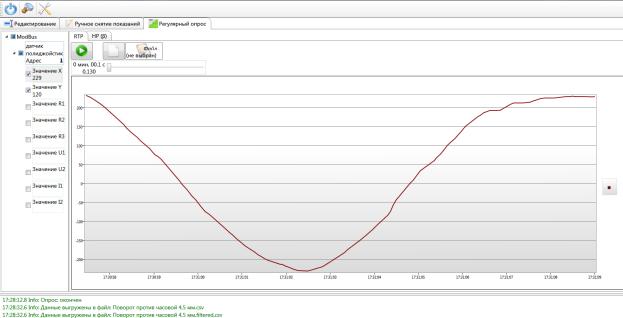
Рисунок 7 – Программа KalibratorGUI в режиме
автоматического замера показаний
Целью эксперимента является определение
зависимости показаний полезного сигнала министика от величины отклонения
рукоятки министика и от угла поворота.
Теоретические графики зависимостей идеального
министика представлены на рисунке 8. В ходе эксперимента было установлено,
насколько зависимость полезного сигнала исследуемого министика соответствует
теоретическим представлениям.
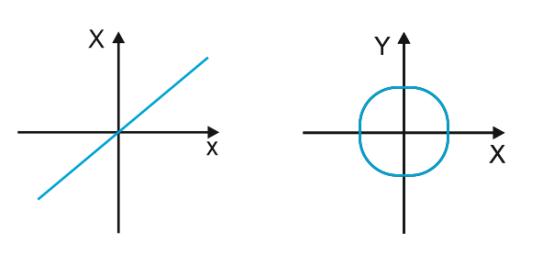
Рисунок 8 – Графики зависимостей идеального министика: передаточная
функция – зависимость показаний X от отклонения рукоятки x (слева); лепестковая
диаграмма зависимости показаний X и Y от угла поворота (справа)
Качество полезного сигнала реального министика
оценивается по показателям:
-
точность
– разброс показаний при определенном отклонении рукоятки;
-
нелинейность
– отклонение кривой передаточной функции исследуемого министика от прямой
линии;
-
гистерезис
– различие выходного сигнала при одинаковом значении отклонения рукоятки, но
разных направлениях его изменения.
В ходе эксперимента были произведены следующие замеры
показаний X и Y министика:
-
измерение
показаний при постоянном угле поворота министика и изменяемом отклонении
рукоятки;
-
измерение
показаний при постоянном отклонении рукоятки министика и изменяемом угле
поворота.
Измерение показаний при постоянном угле поворота
министика и изменяемом отклонении рукоятки было проведено в следующих условиях:
-
пределы
отклонения рукоятки министика от центра: –6..+6 мм;
-
направление
отклонения: влево (от +6 мм до –6 мм), вправо (от –6 мм до +6 мм);
-
угол
поворота министика: 0°, 45°, 90°;
-
число
итераций замера показаний: 3, с последующим усреднением полученных значений.
На рисунке 9 представлены результаты измерений
для угла поворота министика 0°, на рисунке 10 – для угла поворота министика
90°, на рисунках 11 и 12 – для угла поворота министика 45°.
Рисунок 9 – Результаты измерений для
угла поворота министика 0°
(координата Х)
Рисунок 10 – Результаты измерений
для угла поворота министика 90°
(координата Y)

Рисунок 11 – Результаты измерений
для угла поворота министика 45°
(координата X)
Рисунок 12 – Результаты измерений
для угла поворота министика 45°
(координата Y)
Для оценки точности показаний применяется
значение среднеквадратического отклонения (СКО) измеренных при итерациях показаний
в точке с заданным отклонением рукоятки. Относительное значение δ
вычислялось по формуле
|
δ
=|СКО/Хср| |
(1) |
где Хср – среднее значение в данной точке.
Для оценки нелинейности при помощи метода
наименьших квадратов (функция ЛИНЕЙН() пакета MS Excel) строится аппроксимирующая функция прямой линии вида X=kx+b. Далее нелинейность NL
вычисляется по формуле
|
NL =|X–Xрасч|/ΔX |
(2) |
где Х – фактическое значение координаты в данной
точке, Храсч – вычисленное при помощи аппроксимирующей функции, ΔX –
диапазон значений передаточной функции.
Гистерезис G показаний оценивается по формуле:
|
G=|Xпр-Xл|/Хср
ΔX, |
(3) |
где Xпр – значение параметра
в данной точке при перемещении рукоятки вправо, Xл – при перемещении
влево, ΔX – диапазон значений передаточной функции.
Результаты расчетов представлены в таблице 1.
Таблица 1 – Параметры качества сигнала
исследуемого министика
|
Показатель |
Угол 0°, координата X |
Угол 90°, координата Y |
Угол 45°, координата X |
Угол 45°, координата Y |
|
Диапазон
значений |
522 |
485 |
403 |
394 |
|
Макс.
отклонение |
35,36% |
10,10% |
141,42% |
2,08% |
|
Макс.
нелинейность |
9,52% |
10,66% |
9,64% |
10,51% |
|
Макс.
гистерезис |
3,90% |
3,65% |
5,96% |
5,84% |
Измерение показаний при постоянном отклонении
рукоятки министика и изменяемом угле поворота было проведено в следующих
условиях:
-
угол
поворота министика: 0°..360° с шагом 30°;
-
направление
вращения: по часовой стрелке (0°..360°), против часовой стрелки (360°..0°);
-
отклонение
рукоятки министика от центра: 1,5 мм; 3 мм; 4,5 мм;
-
число
итераций замера показаний: 5, с последующим усреднением полученных значений.
На рисунке 13 в виде лепестковой диаграммы представлены
результаты измерений. По результатам измерений была построена трехмерная
поверхностная диаграмма зависимости показаний X и Y от угла и величины отклонения
рукоятки, отображенная на рисунке 14.
Рисунок 13 – Результаты измерений
показаний министика при его вращении с постоянным значением отклонения рукоятки
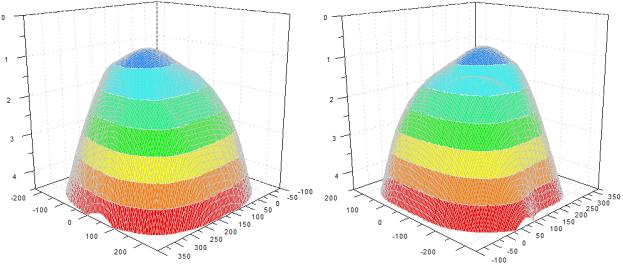
Рисунок 14 – Трехмерная
поверхностная диаграмма зависимости показаний министика от отклонения рукоятки
Выводы:
1. Выбранная оптическая
схема министика на основе упругодеформируемого элемента позволяет создавать
работоспособные и высокоэффективные устройства.
2. Максимальный диапазон
отклонения рукоятки министика составляет +/-6.0 мм, что укладывается в
оптимальный диапазон амплитуд отклонения пальцев руки порядка 12-20 мм.
3. Передаточная функция исследованного
оптического министика линейна и симметрична в диапазоне отклонения рукоятки в
пределах –3..+3 мм. При больших отклонениях
кривые показаний приобретают экспоненциальную форму.
4. Мертвая зона министика
не превышает 0,5 мм по всем координатам.
5. Максимальная величина
гистерезиса составляет 5,96% диапазона значений передаточной функции.
Максимальный гистерезис наблюдается при угле поворота министика 45°.
Таким
образом, передаточная функция оптического министика соответствует требованиям, предъявляемым к средствам
управления сложной робототехникой, манипуляторами и летательными аппаратами.
Конструкция министика требует доработки с целью повышения точности, снижения
нелинейности и гистерезиса показаний.
Прикладные
научные исследования и экспериментальные разработки проведены при финансовой
поддержке государства в лице Минобрнауки России. Уникальный идентификатор
прикладных научных исследований и экспериментальных разработок
RFMEFI57914X0087.