Современные информационные технологии/1.Компьютерная
инженерия.
Черниш О.О.
Черкаський
державний технічний університет, Україна
ФУНКЦІЇ ТА СТРУКТУРА СИСТЕМИ КЕРУВАННЯ
ТРАНСПОРТНИМ РОБОТОМ
Транспортний робот призначений для переміщення вантажів
в горизонтальній площині та уникненні перешкод.
Транспортні роботи найчастіше використовуються в
шкідливих середовищах: підвищена радіація, біологічно небезпечні об’єкти,
надмірна температура тощо.
Транспортний робот складається з наступних підсистем
(рисунок 1):
–
підсистеми приводу;
–
підсистеми датчиків;
–
підсистеми керування;
–
шасі.
Рисунок 1 – Структура транспортного робота
Підсистема приводу призначена для виконання
переміщення.;
Підсистема датчиків призначена для визначення наявності
перешкод на шляху руху та відстані до них
Підсистема
керування призначена для керування підсистемами приводу і датчиків.
Шасі є каркасом для розміщення приводів, датчиків та
підсистеми керування транспортного робота.
Підсистему
керування можна представити у вигляді:
![]() (1)
(1)
де
S – система керування транспортним роботом;
![]() – підсистема
виконання набору функцій;
– підсистема
виконання набору функцій;
![]() – цільова функція;
– цільова функція;
![]() –
функція реалізації цільової функції
–
функція реалізації цільової функції ![]() .
.
Система керування транспортним роботом повинна
реалізовувати наступні функції:
![]() – функція керування переміщенням транспортного
робота;
– функція керування переміщенням транспортного
робота;
![]() – функція керування датчиками;
– функція керування датчиками;
![]() – функція опрацювання сигналів датчиків;
– функція опрацювання сигналів датчиків;
![]() – функція керування переміщенням транспортного
робота (керування ключами);
– функція керування переміщенням транспортного
робота (керування ключами);
![]() – функція індикації стану транспортного робота;
– функція індикації стану транспортного робота;
![]() – функція введення команд (опитування кнопок
керування).
– функція введення команд (опитування кнопок
керування).
Структуру системи керування
транспортним роботом, яка реалізує запропоноване дерево функцій, наведено на
рисунку 2.
Рисунок 2 – Структура системи керування транспортним
роботом
Дана структура дозволяє реалізувати переміщення і
світлову індикацію руху транспортного робота, а також реалізувати уникнення
перешкод за допомогою датчиків, наприклад ультразвукових [1], що використовують
принцип ехолокації (рисунок 3).
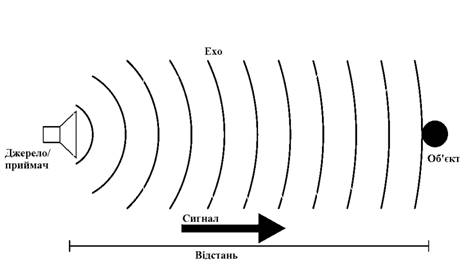
Рисунок 3 – Визначення наявності перешкод за допомогою
ультразвукових датчиків
На основі запропонованої структури може бути
розроблено систему керування транспортним роботом, яка може бути реалізована на
основі відомих мікроконтролерів AVR [2] або PIC [3].
ЛІТЕРАТУРА
1.
Голямина
И.П. Ультразвук. Маленькая эниклопедия, М.: Издательство Советская
Энциклопедия, 1979
2. Хартов
В.Я. Микроконтроллеры AVR. Практикум для начинающих, МГТУ им. Н.Э. Баумана,
2012
3.
Майкл
Предко Справочник по PIC-микроконтроллерам,
ДМК Пресс, 2002