Доповідь/Технічні науки – Автоматизовані системи
управління на виробництві
Д.т.н.
Семенцов Г.Н., Копистинський Л.О., Гутак О.В.
Івано-Франківський
національний технічний університет нафти і газу
Автоматична
система зі змінною структурою для керування процесом буріння свердловин
електробурами
Створення
автоматичних систем керування зі змінною структурою для автоматизації процесу
буріння нафтових і газових свердловин є актуальною науково-прикладною задачею у
зв’язку із інтенсивним впровадженням новітніх технологій буріння глибоких
свердловин на сланцевий газ. У наш час, коли ведеться буріння на сланцеві
поклади, найкращим вибійним двигуном є електробур, найбільшою перевагою якого є
можливість мати канал зв’язку для передачі інформації з вибою свердловини на
поверхню.
Автоматизація подачі долота на вибій
свердловини здійснюється системою зі змінною структурою за осьовим
навантаженням на долото або за активною складовою струму статора двигуна електробура,
коли створюються умови для повного використання потужності електробура [1, 2].
Проте, аналіз літературних джерел (наприклад [1÷3]) вказує на
недостатній обсяг проведених досліджень у контексті використання формальних
критеріїв оцінки стійкості і робастності таких систем.
Метою даної роботи є оцінка показників
стійкості і робастності системи зі змінною структурою, що в використовуються
для автоматичного керування режимами електробуріння.
Відзначимо, що основними принциповими
труднощами розробки алгоритмів і систем керування режимом буріння є те, що об’єкт
керування – це складна система з невідомою змінною у часі динамічною
характеристикою (рис. 1), а керувальні дії від системи керування і збурюючи
впливи від вибою свердловини передаються із запізненням через протяжні
хвилеводи. Отже, маємо модель процесу буріння типу МІМО (multi-input-multi-output).
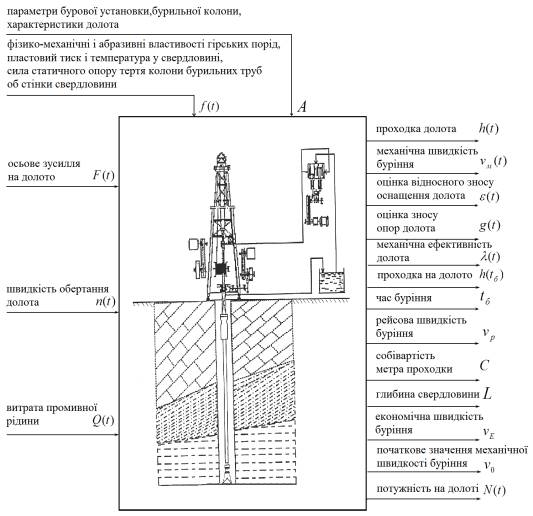
Рисунок 1 – Структура моделі технологічного процесу буріння нафтових і
газових свердловин
Автоматизована система керування режимів
буріння електробурами, що розглядається, передбачає використання однієї
керувальної дії – осьового зусилля на долото F(t)
або струму статора двигуна електробура. Оскільки більш повною характеристикою
завантаження двигуна електробура є активна потужність, у системі керування
давач струму замінено здавачем активної потужності. Алгоритмічну структуру
такої системи автоматичного керування зображено на рис. 2.
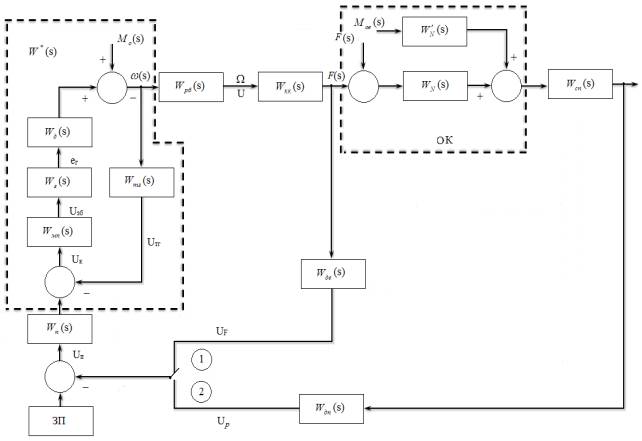
Рисунок
2 - Алгоритмічна структура системи автоматичного керування
Для алгоритмічної структури системи
автоматичного керування потужності електродвигуна досліджено функцію передачі
електробура як одного із елементів комплексної динамічної системи, що
складається із колони бурильних труб довжиною 2500 м, струмопідводу електробура
і вибою свердловини, а також передавальні функції окремих ланок системи
автоматичного керування:
Струмопідвід: ![]() .
.
Електробур:
 .
.
Система «колона бурильних труб-канат»:
 .
.
Редуктор з
барабаном лебідки: ![]() .
.
Електричний двигун системи: Г-Д
Електричний генератор
системи Г-Д:
![]() .
.
Магнітний підсилювач:
 .
.
Напівпровідниковий підсилювач з формуючою
ланкою:
![]() .
.
Давач потужності двигуна електробура:
 .
.
Давач ваги (маси) інструменту:
![]() .
.
Тахогенератор:
![]() .
.
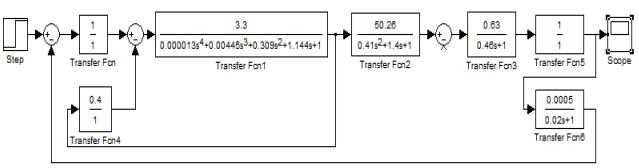
При детальнішому розгляді алгоритмічної
структури системи автоматичного керування отримали таку алгоритмічну структуру
(рис. 3).
/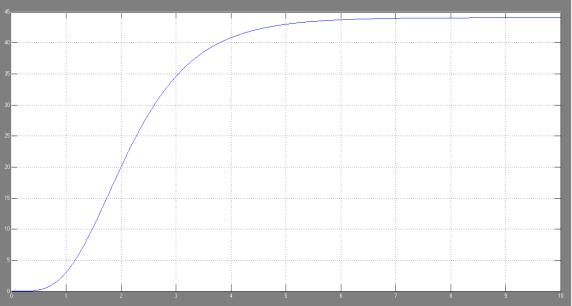
Рисунок 3 –
Алгоритмічна структура робастної системи автоматичного керування (перемикач у
положенні 2) і її перехідна характеристика
Спрощуючи дану алгоритмічну структуру,
знайшли загальну передавальну функцію для робастної
автоматичної системи керування з перемикачем у положенні 2 та частотні
характеристики за допомогою програмного продукту MathLab (рис. 4)
>> bodeplot(w);figure(gcf);
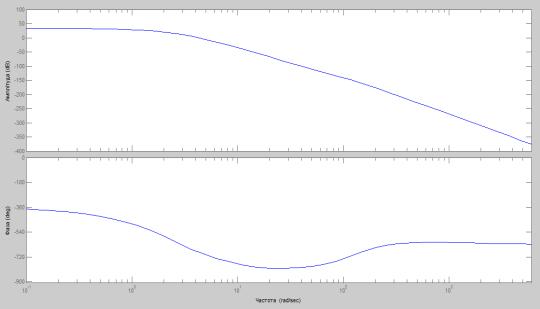
Рисунок
4 – АЧХ та ФЧХ для робастної автоматичної системи керування з перемикачем у
положенні 2
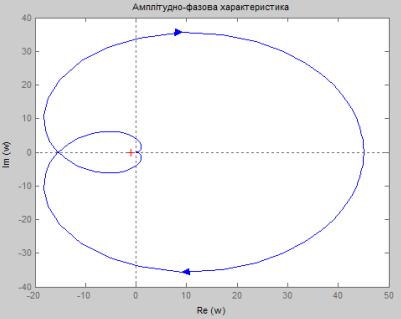
За допомогою програми MathLab і вкладки
Workspace побудували також амплітудно-фазову характеристику, яка зображена на
рис. 5.
>> nyquistplot(w);figure(gcf);
За допомогою програми MathLab і вкладки
Workspace побудували імпульсну характеристику (рис.6).
>> impulseplot(w);figure(gcf);
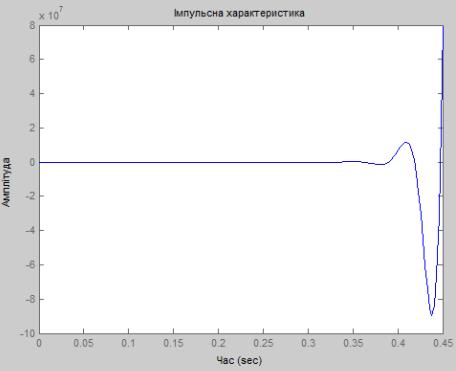
Рисунок 6 –
Імпульсна перехідна характеристика для робастної автоматичної системи керування
з перемикачем у положенні 2
>> bode(w);grid;
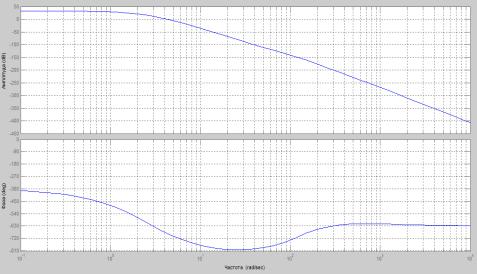
Рисунок 7 – ЛАЧХ
та ЛФЧХ для робастної автоматичної системи керування з перемикачем у положенні
2
Висновок
На основі
аналізу стійкості і показників якості системи автоматичного регулювання
процесом буріння глибоких свердловин електробурами, яка має змінну структуру,
доведено, що найбільш раціональною є структура, яка забезпечує автоматичну
стабілізацію активної потужності двигуна електробура. Система у цьому випадку є
робастною за показниками запасу стійкості і коливальності.
Література:
1. Діхтяренко К.В. Перспектива відродження
електробуріння / К.В.Діхтяренко, В.П.Червінський // Нафта і газ України:
матеріали 9-ої міжнар. наук.-практич. конф. «Нафта і газ України – 2013», м.
Яремча, 4-6 вересня 2013 р. – Л.: «Центр Європи», 2013. – С.59-60.
2. Семенцов Г.Н. Автоматизація
технологічних процесів у нафтовій та газовій промисловості: [навч. посібник] /
Г.Н.Семенцов, Я.Р.Когуч , Я.В.Куровець, М.М.Дранчук. – Івано-Франківськ:
ІФНТУНГ, 2009. – 300 с.
3. Бунчак З. Електробур. Парадокси і
реальність / З.Бунчак, О.Дудар, О.Кекот, О.Турянський. – Електроінформ, №4. –
2003. – С. 8-11.