Технические науки/6.
Электротехника и радиоэлектроника
д.ф.-м.н. Будагян И.Ф.,
аспирант Костин М.С.
Московский государственный технический университет
радиотехники, электроники и
автоматики (МГТУ МИРЭА), Россия
Радиосенсорный виброметрический локатор
Аннотация
Исследование
физико-механических свойств динамических параметров конструктивных элементов
функциональных узлов технических устройств точной радио- и микромеханики требует
применение специальных систем, обеспечивающих бесконтактный сбор виброметрических
данных, описывающих закон колебательного процесса зондируемой поверхности
объекта. Аппаратная реализация бесконтактной диагностики достигается с
применением радиооптических средств сенсорного сканирования. Ввиду
инновационного пути развития информационных технологий в радиоэлектроники,
особое внимание в этой области сосредоточено на системах радиоволнового мониторинга,
построенных по принципу однопозиционных сверхширокополосных локаторов – радиосенсорных
радаров.
Введение
Система радиосенсорной диагностики (СРСД) предназначена для бесконтактного, дистанционного
зондирования поверхности динамических и статических элементов объектов,
генерирующих собственные механические колебания или промодулированных внешними
виброакустическими возмущениями среды. Получение абсолютных и статистически информационных
данных о вибрационных характеристиках (виброперемещении, виброскорости, виброускорении,
резонансных явлениях) радиоэлектронного оборудования и механизмов представляет
одну из задач исследования виброустойчивости и надежности конструкций радиоэлектронных
средств (РЭС) при неразрушающем контроле и диагностике ответственных узлов,
подверженных воздействию вибраций в момент эксплуатации, а также при проведении
стендовых имитационных испытаний. Разработка высокоэффективных систем и
комплексов в области бесконтактных радиоизмерений заслуживает особого внимания,
так как контактные средства на основе акселерометров не применимы для измерения
вибраций малых объектов и в условиях, где контактный съем однозначно не возможен.
Среди бесконтактных средств съема и регистрации вибрационных параметров используют
три основных принципа косвенного восприятия и преобразования механических колебаний
в сигнал: оптический, акустический и радиоволновой. В качестве зондирующего,
предлагается использование радиоволнового метода, принцип действия которого интерпретируется
в рамках теории импульсной сверхширокополосной (СШП) радиолокации. В работе
представлена аналитическая модель радиосенсорного радара, позволяющая численным
образом симулировать принцип радиосенсорного сканирования.
Радиосенсорная
виброметрическая эхолокации
Из всего разнообразия применяемых радиоволновых
методов измерения вибраций можно классифицировать следующие: резонаторные,
интерференционные и фазовые. Для приведенных методов, главным образом, вытекают
три основные проблемы обеспечения качества регистрации фиксируемых вибропараметров:
сохранение высокой стабильности частоты зондирующего радиосигнала с целью
уменьшения ее флуктуации и повышения чувствительности и качества работы системы;
увеличение глубины проникающей способности радиоимпульсов при реализации
подповерхностной локации и обеспечение достаточно удаленного от цели съема
виброакустических параметров с требуемым разрешением. Представленный ряд
недостатков в работе радиовиброметрических систем может компенсироваться с
применением технологий, построенных на принципах СШП радиолокации, что в рамках
современной науки способно решить многие актуальные проблемы с перспективой на
дальнейшую модернизацию. Так, с применением радиоимпульсов наносекундной длительности,
исключается необходимость генерирования СВЧ сигнала заданной частоты, так как
это принято в локаторах с непрерывным и моноимпульсным действием, что
кардинально исключает задачу обеспечения частотной стабилизации в высокочастотной
области. Широкополосный радиоимпульс
формируется как результат дифференцирования видеоимпульса наносекундной длительности
при его воздействии на СШП антенну и не имеет несущей частоты, а характеризуется
центральной частотой и полосой спектра. Причем полоса пропускания радиосенсорного
радара во многом будет завесить от полосы пропускания узконаправленной антенны.
В таком случае остается лишь стабилизировать частоту дискретизации
зондирования, которую, для регистрации механических колебаний, достаточно взять
в диапазоне от сотен кГц до десятков МГц, что не составляет особых трудностей в
техническом смысле реализации. Кроме того, сверхширокополосность радиоимпульса
улучшает энергетику сигнала, обеспечивает требуемую проникающую способность и
делает систему более помехоустойчивой к воздействию внешних электромагнитных помех.
Распределение
во временной последовательности выборки отраженных радиоимпульсов от
вибрирующей цели определяется законом фазовой модуляции, девиация которой отражает
характеристику плоскопараллельных колебаний. Импульсное СШП зондирование, построенное
на временном стробировании, позволяет
четким образом локализовать координатную привязку к цели, тем самым максимальным
образом исключив помехи от пространственно распределенных поверхностей, генерирующих
ложные эхосигналы, и сформировать в более явном виде функцию колебательного
закона исследуемой области. Генерация возбуждающих СШП антенну видеоимпульсов
наносекундной длительности, прием и регистрация информативных эхосигналов
осуществляется на баз однокристального приемопередатчика NVA6100 компании
Novelda AS. При этом в приемном тракте осуществляется не регистрация самого
исследуемого эхосигнала, а его отдельных выборок, каждая из которых формируется
в периоды повторения отраженного сигнала.
Аналитическое
моделирование радиосенсорного локатора
Программный код
описания функциональной модели радиосенсорного виброметрического радара на базе
NVA6100 реализован в среде MatLab и оформлен в виде M-функции,
работа которой описывается наглядными графиками процессов приема и обработки.
Численная модель предполагает рассмотрение частного случая радиоимпульсного
эхоприема сигнала от поверхности вибрирующей цели при наличии ложных вторичных
эхосигналов и гауссовых коррелируемых шумов от подстилающей поверхности и
элементов ограниченного пространства. Численный алгоритм приема и обработки
данных основаны на фазовом методе определения дальности.
Модель
предполагает наличие четырех пространственно распределенных целей – поверхностей
объектов, удаленно расположенных от виброметрического радара по линии визирования.
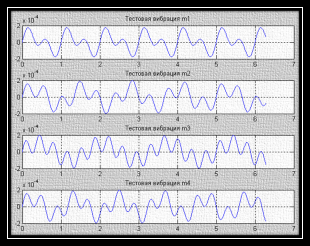
Механические вибрации поверхности каждой цели (для упрощения взято четыре: m1,…,m4) описываются собственным
периодическим негармоническим законом колебаний (рис.1). Предварительно, по
времени задержки отраженного эхосигнала (дальности объекта), система считается
настроенной на второю цель (тестовая вибрация m2). Поскольку численный
эксперимент предполагает рассмотрение случая подповерхностной локации, в модели
формируются значения коэффициентов затухания при прохождении электромагнитной
волны через каждый объект.
 а) б)
а) б)
Рис.1.
Графическое представление: а) реализации источников вибрации; б) потока пространственно
распределенных эхосигналов в отсутствии и наличие помех
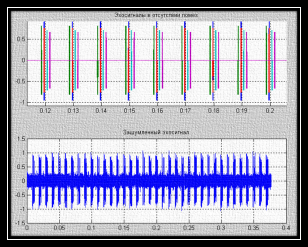
Результатом приема, численной фильтрации (БПФ, селекции массива данных
спектра, ОБПФ) и обработки является графическая реализация эхосигнала от потенциальной
цели m2
(рис.2б). Причем достоверность эхосигнала определяется из критерия отношения
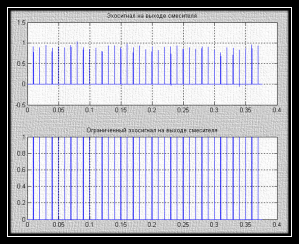
уровней сигнал/шум. Исключение влияния эффектов амплитудной модуляции и флуктуационных
аддитивных помех обеспечивается путем зеркального ограничения сигнала по заданному
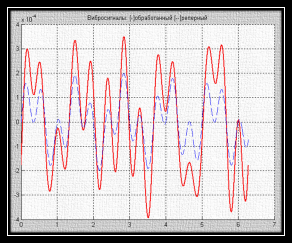
уровню амплитудной отсечки (рис.2а). Для проведения статистической оценки сравнения,
насколько правдоподобен выделенный сигнал механического колебания (сплошная
линяя) условно исходному (пунктирная линяя) – реперному, в модели определяется
численное значение коэффициента корреляции, который для приведенных графиков
равен 0,9373.
а) б)
Рис.2.
Графическое представление: а) ограничения эхосигнал; б) реализации принятого
эхосигнала от заданной цели
Аналитическая модель позволяет заранее просчитать и оценить различные
случаи приема отраженных радиоимпульсов от поверхности заданнгого объеката при
следующих варьируемых параметрах модели: вид (функция) колебаного закона поверхности
объекта; частота зондирования; длительность радиоимпульса; период стробирования;
время задержки (пространственное распределение объектов в пространстве);
коэффициенты прохождения элетромагнитной волны через структуру объекта;
затухание сигнала в пространстве; относительный уровень шумов; параметры
фильтрации.
Заключение
Радиосенсорный метод
сбора параметров виброметрических данных способен существенно расширить информативные
возможности проведения научных и инжереных практических исследований в области
бесконтактных радиоизмерений при отсутствия визуального доступа к заданной цели
методами эхолокации. Представленная модель радара повзоляет отсуществлять численную
симуляцию проведения стендовых лабораторных исследований поверхностей объектов неоднородной
текстуры на различных расстояниях при наличии фоновых помех, преград, варьируя
параметрами внешних виброакустических возмущениий среды, что необходимо для
отработки алгоритма программного обеспечения организации численных методов
обработки принимаемых эхосигналов в нелабораторных условиях.
Литература
1.
Krodkiewski
J.M. Mechanical Vibration. – USA: The University of Melbourne Department of
Mechanical and Manufacturing Engineering, 2008. – 247 p.
2.
Ерошенков М.Г. Радиолокационный
мониторинг. – М.: МАКС Пресс, 2004. – 452 с.
3.
Костин М.С. Моделирование
виброметрического СШП радара // Актуальные проблемы и перспективы развития
радиотехнических и инфокоммуникационных систем: Сб. научн. тр.– М.: РАДИОИНФОКОМ, 2013. – Ч.1. – с.246 – 249.
4.
James D.
Taylor. «Ultra-wideband Radar Tech-nology»
CRC Press Boca Raton, London, New Work, Washington, 2000.
5. Wang, Yazhou. «UWB Pulse Radar for Human Imaging
and Doppler Detection Applications». PhD diss., University of Tennessee,
2012.
6. Kinzie, Nicola Jean. «Ultra-Wideband Pulse
Doppler Radar for Short-Range Targets». PhD diss., University of
Colorado, 2011.
7.
Mahafza,
Bassem R. Radar systems & analysis and design using Matlab. – USA.: CHAPMAN
& HALL/CRC, 2009. – 533 p.