УДК 631.316.022.4
МЕТОДИКА
ПРОЕКТУВАННЯ СТРІЛЬЧАТОЇ ЛАПИ КУЛЬТИВАТОРА
З ЛОКАЛЬНИМИ ЕЛЕМЕНТАМИ ЗМІЦНЕННЯ
А.
Пугач, професор (ДДАЕУ,
Україна)
Р. Oberling, інженер («Oberling Pascale» Франція)
С.
Слаква, інженер (Україна)
В
роботі розглянута розрахунково-графічна методика адаптації профілю стрілчатої
лапи культиватора по умовам формування оптимального зубчатого профілю ріжучої
кромки.
Постановка
проблеми. Одним з ефективних
методів покращення підрізаючої спроможності стрільчатих лап є формування зубчатого
профілю ріжучої кромки за рахунок направленого зносу матеріалу лапи. Технічно
направлений знос можна забезпечити шляхом створенням локальних зміцнених зон на
поверхні. Проте, при цьому необхідно
знайти алгоритм розташування таких зон, їх геометричні параметри та профіль
самої ріжучої кромки. Вирішення цієї проблеми дозволить створити стрілчату лапу
з конструктивними параметрами, максимально адаптованими до виконання задач
міжрядного та суцільного обробітку ґрунту.
Аналіз досліджень і публікацій. Аналіз
теоретичних та практичних напрацювань в галузі удосконалення стрілчатих лап вказує
на те, що підвищення їх підрізаючої спроможності та зносостійкості вирішується
в основному за рахунок оптимізації профілю ріжучої кромки пристосовно до конкретних
ґрунтових умов. При цьому, основний напрямок удосконалень спрямований на
оптимізацію траєкторії руху, створення режиму різання з прискоренням та
ковзанням.
Підтримання ріжучої кромки в загостреному стані на серійних стрільчатих лап підвищується нанесенням шару зносостійкого матеріалу на тильну поверхню леза. За рахунок різниці у інтенсивності зносу матеріалів деякий час відслідковується явище самозагострення леза. Проте процес зносу не є керованим і тому він не формує ріжучу кромку потрібного профілю.
В розвиток цього напрямку
інститутом ім. Патона запропонована конструкція краплинного нанесення
спеціального сплаву на робочу поверхню леза. Використання
даної технології добре зарекомендувало себе на стрільчастих лапах плоскорізів
для основного обробітку ґрунту, або інакше в умовах підвищеного тиску і, як
наслідок, підвищених сил тертя. Для стрільчастих лап поверхневого обробітку ґрунту
наведене рішення особливих переваг не дало.
Таким чином, проблема створення оптимального режиму різання стрілчатою лапою ще не вирішена і є актуальною на даному етапі.
Мета роботи. Максимальна адаптація конструктивних параметрів стрілчатої лапи до технологічного процесу поверхневого розпушення ґрунту та знищення бур'яну шляхом підрізання.
Основний
матеріал досліджень.
Основними вихідними даними для проектування
культиваторної лапи з локальними елементами зміцнення є:
- тип ґрунту, його кути зовнішнього ![]() і внутрішнього
і внутрішнього ![]() тертя, град;
тертя, град;
- ![]() – кут нахилу дотичної
до профілю зуба, град;
– кут нахилу дотичної
до профілю зуба, град;
- ![]() – кут тертя бур’янів
по сталі, град;
– кут тертя бур’янів
по сталі, град;
- 2b –
ширина захвату лапи, мм;
- ![]() – глибина обробітку,
мм;
– глибина обробітку,
мм;
- ![]() – крок між локальними елементами зміцнення, мм;
– крок між локальними елементами зміцнення, мм;
- ![]() – функція кута нахилу
локальних елементів по лезу.
– функція кута нахилу
локальних елементів по лезу.
Кут нахилу дотичної до профілю зуба ![]() [1] приймається з умови сходу бур’янів і ґрунту по лезу лапи,
і знаходиться в межах
[1] приймається з умови сходу бур’янів і ґрунту по лезу лапи,
і знаходиться в межах ![]() .
.
Ширина захвату 2b
приймається в межах 250, 270, ![]() приймається з умови
утворення зубів і знаходиться в межах
приймається з умови
утворення зубів і знаходиться в межах![]() =20 –
=20 –
Функція кута нахилу
елементів по лезу ![]() визначається з умови
максимально тривалого збереження профілю зуба. Ця функція встановлюється експериментально.
визначається з умови
максимально тривалого збереження профілю зуба. Ця функція встановлюється експериментально.
Враховуючи характерне спрацювання культиваторної лапи в зоні носка, котрий
відбувається по кривій лінії, на базі
загальної моделі поверхні, що розгортується, можливо запропонувати складову
поверхню [3]. (рис. 1).
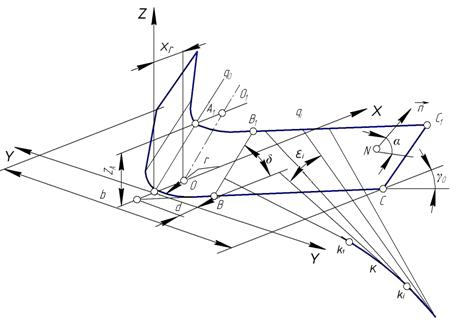
Рис. 1. Схема параметрів складової поверхні
культиваторної лапи
Направляюча крива поверхні культиваторної лапи являє
собою поєднання дуги кола і прямих ліній, тому розглянемо формування кожного елементу окремо.
Визначення радіуса дуги носка лапи будемо проводити на
основі деформацій, що виникають у ґрунті. Для цього по номограмі, приведеній на рис. 2. визначимо мінімальну
різницю напружень у ґрунті, котра
виникає на різних ділянках леза.
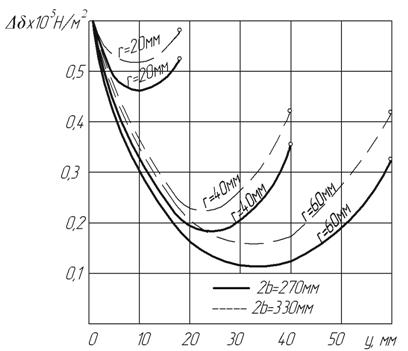
Рис.2. Номограма для визначення
радіуса носка лапи
Як
видно з графіків на ділянці![]() мм найбільше
напруження викликає межа зміни радіуса
носка лапи
мм найбільше
напруження викликає межа зміни радіуса
носка лапи ![]() мм.
мм.
Так, при ![]() мм, різниця напруг, від різних профілів рівна
мм, різниця напруг, від різних профілів рівна ![]() 0,47·105 Н/м2, а при
0,47·105 Н/м2, а при ![]() мм, відповідно
мм, відповідно ![]() 0,25·105 Н/м2.
0,25·105 Н/м2.
При виборі радіуса
носка лапи слід враховувати, що
при високих напруженнях у ґрунті
відбувається її рихлення за рахунок
енергії стиску, у той час як низькі напруження забезпечують тільки
сколювання шару ґрунту, котрий призводить до утворення глиб.
Кут нахилу направляючої знайдемо з монограми, що
приведена на рис.3. Як видно з характеру залежностей кутів тертя
ґрунту по сталі кут нахилу направляючої ![]() знаходиться в межах
знаходиться в межах ![]() 27 - 310 незважаючи на те, що залежність кута тертя ґрунту по сталі
27 - 310 незважаючи на те, що залежність кута тертя ґрунту по сталі ![]() має хвильовий
характер.
має хвильовий
характер.
Визначивши радіус носка лапи ![]() і кут нахилу утворюючої
і кут нахилу утворюючої ![]() , формуємо направляючу криву.
, формуємо направляючу криву.
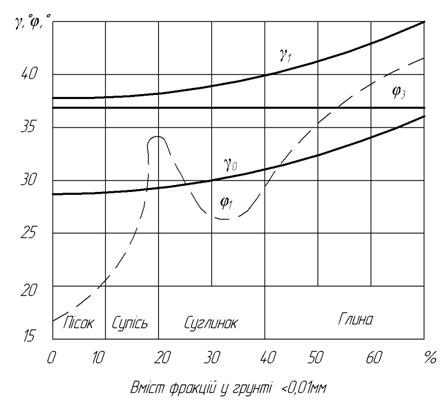
Рис.3. Номограма для визначення кута нахилу
прямолінійної ділянки леза
При графічній побудові
зображують систему координат Оху (рис 1.)
Поверхня лапи складається з поверхні циліндра з осьовою лінією ![]() і площини
і площини ![]() , котрі спряжені по утворюючій циліндра
, котрі спряжені по утворюючій циліндра![]() .
.
Циліндр має радіус ![]() , а горизонталь
, а горизонталь![]() площини
площини ![]() , проведена з точки
, проведена з точки
![]() , має нахил до
горизонтальної площини проекцій під кутом
, має нахил до
горизонтальної площини проекцій під кутом ![]() , котрий визначається наступним чином:
, котрий визначається наступним чином:
![]() (1)
(1)
де ![]() – кут кришення, град.
– кут кришення, град.
Таким чином, направляюча поверхні, що розгортується
буде складатись з двох ліній: дуги кола ![]() :
:
![]() , (2)
, (2)
де ![]() – відстань центра кола
– відстань центра кола
![]() від початку координат;
від початку координат;
и прямої ![]() , рівняння якої
виглядає наступним чином:
, рівняння якої
виглядає наступним чином:
![]() , (3)
, (3)
де ![]() ;
;
![]() і
і ![]() – координати точки
– координати точки ![]() переходу кола в пряму.
переходу кола в пряму.
Координати точки переходу ![]() визначимо,
продиференціювавши (2) і (3) по
визначимо,
продиференціювавши (2) і (3) по ![]() . Диференціюючи, будемо мати:
. Диференціюючи, будемо мати:
![]() і
і ![]() .
.
Підставивши у друге рівняння вираз першої похідної з
першого, і враховуючи, що ![]() отримаємо перше
рівняння для визначення координати точки
отримаємо перше
рівняння для визначення координати точки
![]() :
:
![]() . (4)
. (4)
Приєднавши до отриманого рівняння кола, отримаємо
систему для визначення точки ![]() :
:
 (5)
(5)
Таким чином, направляючою кривою циліндричної
поверхні носа лапи
буде дуга кола ![]() :
:
![]() . (6)
. (6)
Визначимо параметри прямолінійної ділянки леза через координати точки ![]() :
:
![]() ,
, ![]() , (7)
, (7)
Звідки вільний член направляючої рівний:
![]() . (8)
. (8)
Отримане рівняння дозволяє рівняння
для вільного члена ![]() записати простіше:
записати простіше:
![]() (9)
(9)
при максимальному куті ![]() 0.
0.
Координати кінцевих точок направляючої ![]() знайдемо, підставивши
в рівняння направляючої ширину захвату:
знайдемо, підставивши
в рівняння направляючої ширину захвату:
![]() ; (10)
; (10)
 . (11)
. (11)
Таким чином, рівняння
направляючої буде мати вигляд:
![]() , при
, при ![]() ; (12)
; (12)
![]() , при
, при ![]() . (13)
. (13)
При спрощеному
варіанті проектування, коли кут нахилу утворюючої прийнятий за 310, рівняння направляючої буде мати вид:
![]() при
при
![]() ; (14)
; (14)
![]() , при
, при
![]() . (15)
. (15)
Отриманні дані служать вихідними для побудови
поверхні лапи.
Висновки.
Розроблена методика дозволяє виконати профіль леза стрілчатої лапи таким чином, що
він сприяє формуванню найбільш
сприятливого режиму взаємодії з ґрунтом.
Список використаних джерел.
1. Кобець А.С. Обґрунтування кута нахилу напрямної
поверхні культиваторної лапи. А.С. Кобець, А.М. Пугач / Агроінженерні
дослідження // Вісник Львівського національного
аграрного університету: – Львів, 2008. - №12. – Т. 1. с. 405 – 410.
2. Кобець А.С. Исследование износа культиваторных
лап оснащенных элементами локального упрочнения рабочей
поверхности. А.С. Кобець, Б.А. Волик, А.М. Пугач / Механізація сільського
виробництва // Вісник ХНТУ ім.
Петра Василенка. – Харків. 2007. - №59. - с. 76 – 80.
3. Патент України
№ 29516 МПК А01В 35/00 Робочий
орган культиватора / Кобець А.С., Волик Б.А., Пугач А.М./10.01.2008 Бюл. №1. –
2 с.
В работе рассмотрена расчетно-графическая
методика адаптации профиля стрельчатой лапы культиватора по условиям формирования оптимального профиля
режущей кромки
DESIGNING METHODS OF CULTIVATOR´S WORKING BODIES TOOTH WITH LOCAL STRENGTHENING ELEMENTS
Pugach
A.
Oberling Р.
Slakva S.
Calculation and
graphic methods of profile adaptation of
cultivator’s working bodies tooth in accordance with optimal toothed
profile formation of cutting edge are
examined in the given work