Технические
науки/12. Автоматизированные системы
управления на производстве.
Гейер Р.Г., Дегтяренко И.В., Палис Ш.
Донецкий национальный технический
университет, Украина
Отто-фон-Герике-Университет Магдебург, Германия
Обоснование применения H∞ -
метода при разработке системы
управления пониженного порядка кристаллизатором непрерывного действия
Математическая модель
кристаллизатора непрерывного действия, описываемая нелинейным
интегро-дифференциальным уравнением в частных производных для распределения размеров
кристаллов и однородным дифференциальным уравнением для жидкой фазы, является
сложной системой и симуляции указывают на возможность появления нелинейных
колебаний функции распределения размеров кристаллов [1]. Таким образом, задача
управления данным объектом является нетривиальной и требует тщательной
проработки алгоритма синтеза регулятора.
Целью управления
кристаллизатором непрерывного действия является стабилизация распределения
размеров кристаллов. Однако, математическая модель слишком сложна для синтеза
регулятора, поэтому должен быть принят ряд мер по упрощению модели объекта
управления:
-
некоторыми химическими и физическими
процессами, свойственными процессу кристаллизации, можно пренебречь из-за
незначительного их влияния;
-
в области равновесия можно осуществить
линеаризацию для избежания трудностей, возникающих при использовании нелинейной
модели объекта управления [2];
-
для достижения свойства реализуемости
регулятора, можно провести понижение порядка полученной линейной модели.
Для редукции математической
модели объекта управления могут быть использованы следующие методы:
-
сбалансированное отбрасывание;
-
сбалансированное стохастическое
отбрасывание;
-
модальное отбрасывание в пространстве
состояний;
-
сбалансированное отбрасывание по Шуру
[3].
Для объекта пониженного
порядка может быть применен H∞ - метод управления. К контроллеру
выдвигаются требования по стабилизации управляемой величины в установившемся
режиме, высокой устойчивости к появляющимся возмущениям, а также к
несоответствию модели объекта управления и реального объекта, вызванного
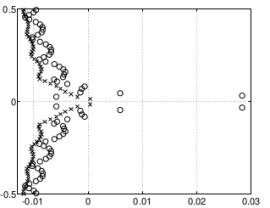
упрощениями и редукцией модели. Как видно из расположения нулей и полюсов
упрощенной системы на Рисунке 1,
H∞ - метод может быть применен потому, что требование о наличии
ограниченного числа полюсов выполняется. При синтезе регулятора будет
использован метод желаемой ЛАЧХ с применением
H∞ - подхода [3].
Рисунок 1 — Расположение нулей и полюсов упрощенной модели
Таким образом, H∞ - техники могут быть эффективным
методом разработки регулятора для управления сложным нелинейным объектом с
распределенными параметрами и, благодаря современным математическим методам,
иметь невысокий порядок для упрощения физической реализации.
Литература:
1. S. Palis, A.
Kienle, Diskrepanzbasierte Regelung der kontinuierlichen Kristallisation,
Automatisierungstechnik, 2012
2. S. Motz, A.
Mitrovi, E.-D. Gillesa, U. Vollmer, J. Raisch, Modeling, simulation and
stabilizing H∞-control of an oscillating continuous crystallizer with
fines dissolution, Chemical Engineering Science, 2003
3. G. Dullerud, F. Paganini, A course in robust control theroy – a convex approach, Springer New York, 2010