Ковалец О.Я.
Национальный
технический университет Украины «КПИ»
СХЕМНАЯ ВОЗМОЖНОСТЬ УМЕНЬШЕНИЯ
ДРЕЙФА ГИРОСТАБИЛИЗАТОРА
Известно, что гироскопические
стабилизаторы, построенные на базе поплавковых интегрирующих гироскопов, имеют
уходы, значительно превышающие собственный уход таких гироскопов в условиях
неподвижного основания. Такое увеличение объясняется, в первую очередь,
влиянием на них угловых колебаний стабилизированной платформы.
Проанализируем схемную возможность
уменьшения влияния угловых колебаний стабилизированной платформы на величину
собственного ухода интегрирующего гироскопа и, следовательно, на величину
дрейфа стабилизатора.
Считая случайный процесс стационарным,
запишем выражения для возмущающих моментов –
![]() ;
; ![]() , (1)
, (1)
где ![]() и
и ![]() математические ожидания возмущающих моментов;
математические ожидания возмущающих моментов;
![]() и
и ![]() – центрированные случайные функции.
– центрированные случайные функции.
Найдем математическое ожидание угловой
скорости ухода платформы ![]() используя метод шумовых функций.
используя метод шумовых функций.
Первое
приближение
Уравнения движения платформы для двух связанных
каналов стабилизации с учетом (1) имеют вид –
![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
;
![]() ;
; ![]() . (2)
. (2)
Второе
приближение
Подставляя найденные выражения (2) в
исходные линеаризованные уравнения движения платформы, получаем две новые
независимые системы (рис. 1). Ограничимся рассмотрением только первой, т.к. по
структуре все каналы одинаковы.
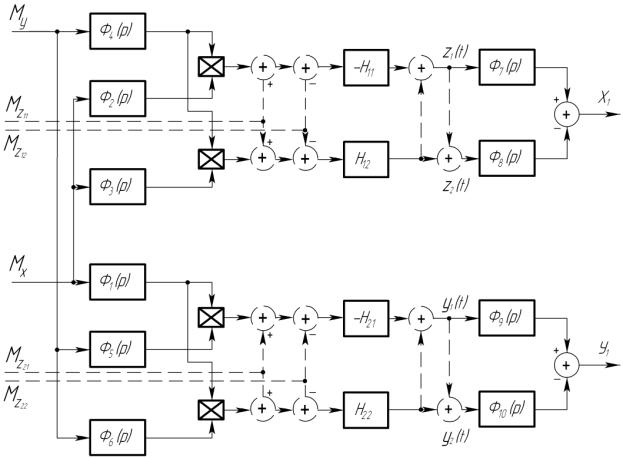
Рис. 1. Блок-схема двух
каналов стабилизации. Второе приближение
На вход первой системы подаются случайные
возмущения –
![]() ;
; ![]() . (3)
. (3)
Математические ожидания величин ![]() и
и ![]() определяются как –
определяются как –
 (4)
(4)
где ![]() ,
, ![]() ,
, ![]() ,
, ![]() – математические ожидания моментов трения и
дебаланса соответственно;
– математические ожидания моментов трения и
дебаланса соответственно; ![]() ,
, ![]() значения
взаимных корреляционных функций переменных
значения
взаимных корреляционных функций переменных ![]() ,
, ![]() ,
, ![]() при
при ![]() .
.
Так как ![]() (что следует из присутствия свободного члена
в передаточной функции цепи стабилизации), то
(что следует из присутствия свободного члена
в передаточной функции цепи стабилизации), то
 (5)
(5)
Согласно структурной схеме (рис.1),
реакция платформы на эти возмущения будет представлять собой уход с постоянной
угловой скоростью, математическое ожидание которой определяется выражением:
![]()

![]() для левой ветви
для левой ветви ![]() ; (6)
; (6)
![]()

![]() для правой ветви
для правой ветви ![]() . (7)
. (7)
Как видно из выражений (6) и (7), в случае применения двух гироскопов в каждом канале стабилизации математическое ожидание угловой скорости ухода платформы существенно уменьшается по сравнению с аналогичным для случая применения одного гироскопа в каждом канале стабилизации. Если параметры гироскопов будут одинаковы, то собственные уходы ГСП, обусловленные влиянием перекрестных связей между каналами стабилизации, будут равны нулю. Дрейф платформы в этом случае будет определяться лишь вредными моментами в осях прецессии гироскопов.